You might also like
- Effect of Soil Plug Removal On The Load-Carrying Capacity of Symmetric and Non-Symmetric Pile GroupsDocument25 pagesEffect of Soil Plug Removal On The Load-Carrying Capacity of Symmetric and Non-Symmetric Pile GroupsChandra MouliNo ratings yet
- 125 Du 112017Document3 pages125 Du 112017SANKARA REDDYNo ratings yet
- Ee 303 LCS December 2017Document2 pagesEe 303 LCS December 2017Jerin AntonyNo ratings yet
- CS Set1 ESEDocument2 pagesCS Set1 ESEajinkya bhagatNo ratings yet
- Set No. 1: Digital Control Systems RT42021Document8 pagesSet No. 1: Digital Control Systems RT42021Akhil ChinnaNo ratings yet
- Gujarat Technological UniversityDocument3 pagesGujarat Technological Universityfeyayel988No ratings yet
- WWW - Manaresults.Co - In: Define Stability. What Is Routh Stability Criterion?Document2 pagesWWW - Manaresults.Co - In: Define Stability. What Is Routh Stability Criterion?mushahedNo ratings yet
- CS Previous Question PapersDocument48 pagesCS Previous Question PapersShaleva SinghNo ratings yet
- Thapathali Campus: Subject:-Control SystemDocument2 pagesThapathali Campus: Subject:-Control Systemjagat bhusalNo ratings yet
- III B. Tech I Semester Regular/Supplementary Examinations, October/November - 2016 Control SystemsDocument8 pagesIII B. Tech I Semester Regular/Supplementary Examinations, October/November - 2016 Control SystemsPUDI HAREESHNo ratings yet
- The LNM Institute of Information Technology Ece and Cce ECE 321: Control System Engineering (End-Term Examination)Document17 pagesThe LNM Institute of Information Technology Ece and Cce ECE 321: Control System Engineering (End-Term Examination)Kunal ChamoliNo ratings yet
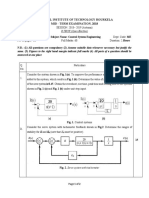
- National Institute of Technology Rourkela Mid - Term Examination, 2018Document2 pagesNational Institute of Technology Rourkela Mid - Term Examination, 2018Rahul SahuNo ratings yet
- Control Systems 6Document8 pagesControl Systems 6paramkusamNo ratings yet
- Cs Winter 21 GtuDocument3 pagesCs Winter 21 GtuSandeep kumarNo ratings yet
- Digital Control Systems May 2007 Question PaperDocument8 pagesDigital Control Systems May 2007 Question Paperelimelek100% (3)
- 6th Sem PapersDocument12 pages6th Sem Papers21BEE044 MANOJ KHEMANINo ratings yet
- 115DU122016 JNTUH Exam PapersDocument2 pages115DU122016 JNTUH Exam PapersethanNo ratings yet
- Code No: 35051Document8 pagesCode No: 35051SRINIVASA RAO GANTANo ratings yet
- EE302 MidSem Oct2021Document1 pageEE302 MidSem Oct2021Gingka HaganeNo ratings yet
- WWW - Manaresults.Co - In: (Electrical and Electronics Engineering)Document3 pagesWWW - Manaresults.Co - In: (Electrical and Electronics Engineering)mushahedNo ratings yet
- Eee Previous Year Question PaperDocument8 pagesEee Previous Year Question PaperYuvraj KhadgaNo ratings yet
- 2022-Dec EC-411 100Document1 page2022-Dec EC-411 100Durgesh AnandNo ratings yet
- BDA 30703 Sem 1 1213 PDFDocument7 pagesBDA 30703 Sem 1 1213 PDFJevine LaiNo ratings yet
- 9A02503 Control SystemsDocument4 pages9A02503 Control SystemssivabharathamurthyNo ratings yet
- CS Ii 291121Document2 pagesCS Ii 2911214141 Abdul GaniNo ratings yet
- Khwaja Yunus Ali University: Department of Electrical and Electronic Engineering Online Final Examination: Spring - 2021Document3 pagesKhwaja Yunus Ali University: Department of Electrical and Electronic Engineering Online Final Examination: Spring - 2021Abdullah SaikatNo ratings yet
- MAKEUPDocument3 pagesMAKEUPsaikar.challaNo ratings yet
- Nov Dec 2016Document4 pagesNov Dec 2016Shubham KaklijNo ratings yet
- Module Bank Control SystemsDocument4 pagesModule Bank Control Systemsgnandini72561No ratings yet
- Kulliyyah of Engineering: End-Of-Semester Examination SEMESTER 2, 2019/2020 SESSIONDocument8 pagesKulliyyah of Engineering: End-Of-Semester Examination SEMESTER 2, 2019/2020 SESSIONMu'adzAzriNo ratings yet
- Cs April 2011Document8 pagesCs April 201129viswa12No ratings yet
- CTRJun2010 (حديث)Document3 pagesCTRJun2010 (حديث)Eng M. EissaNo ratings yet
- 9A19401 Control SystemsDocument5 pages9A19401 Control SystemssivabharathamurthyNo ratings yet
- April - 2018-19Document3 pagesApril - 2018-19SaikumarNo ratings yet
- 9A19401 Contol SystemsDocument7 pages9A19401 Contol SystemssivabharathamurthyNo ratings yet
- 2020-09-18SupplementaryEC409EC409-E - Ktu QbankDocument3 pages2020-09-18SupplementaryEC409EC409-E - Ktu QbankArjun S KumarNo ratings yet
- VNR Vignana Jyothi Institute of Engineering and TechnologyDocument2 pagesVNR Vignana Jyothi Institute of Engineering and TechnologyNamaswini SureshNo ratings yet
- Gujarat Technological UniversityDocument2 pagesGujarat Technological UniversityHerat HirparaNo ratings yet
- CSZG524 ESZG524 MELZG524 - Real Time Operating System - 2023-24 - Midsem - Make UpDocument3 pagesCSZG524 ESZG524 MELZG524 - Real Time Operating System - 2023-24 - Midsem - Make Up2022ht80553No ratings yet
- EC409 Control SystemsDocument12 pagesEC409 Control SystemsSuryakanta PattanaikNo ratings yet
- DIGITAL CONTROL SYSTEMS April 2018Document8 pagesDIGITAL CONTROL SYSTEMS April 2018KOTHYADA JOSHNANo ratings yet
- Dec. EC409-C - Ktu QbankDocument3 pagesDec. EC409-C - Ktu QbankNISHANT KUMARNo ratings yet
- Control System Question PaperDocument2 pagesControl System Question PaperKishor GooddayNo ratings yet
- 115 Du 032017Document2 pages115 Du 032017ethanNo ratings yet
- Ryerson University: Department of Mechanical and Industrial EngineeringDocument12 pagesRyerson University: Department of Mechanical and Industrial EngineeringManpreetGillNo ratings yet
- Control SystemsDocument8 pagesControl Systemsvasantha_btechNo ratings yet
- 3130905Document2 pages3130905manish_iitr0% (1)
- Be Summer 2022Document2 pagesBe Summer 2022SonuNo ratings yet
- r05320803 - Process Dynamics & ControlDocument7 pagesr05320803 - Process Dynamics & ControlSRINIVASA RAO GANTANo ratings yet
- UFMFV7-15-2 Control (2017 August)Document5 pagesUFMFV7-15-2 Control (2017 August)Nuwan AsankaNo ratings yet
- 22 23Document2 pages22 23Goura Sundar TripathyNo ratings yet
- Control SystemsDocument8 pagesControl SystemsprakashjntuNo ratings yet
- 115 Du 122016Document2 pages115 Du 122016SANKARA REDDYNo ratings yet
- Question Paper Code:: Reg. No.Document3 pagesQuestion Paper Code:: Reg. No.HOD ECE KNCETNo ratings yet
- CA1 Control System (Jan 2024)Document6 pagesCA1 Control System (Jan 2024)Ruvenderan SuburamaniamNo ratings yet
- BMS College of Engineering, Bangalore-560019: June 2016 Semester End Make Up ExaminationsDocument3 pagesBMS College of Engineering, Bangalore-560019: June 2016 Semester End Make Up Examinationskoushik bhatNo ratings yet
- Robust Adaptive Control for Fractional-Order Systems with Disturbance and SaturationFrom EverandRobust Adaptive Control for Fractional-Order Systems with Disturbance and SaturationNo ratings yet
- Design and Implementation of Large-Range Compliant Micropositioning SystemsFrom EverandDesign and Implementation of Large-Range Compliant Micropositioning SystemsNo ratings yet
- Mathematical and Computational Modeling: With Applications in Natural and Social Sciences, Engineering, and the ArtsFrom EverandMathematical and Computational Modeling: With Applications in Natural and Social Sciences, Engineering, and the ArtsRoderick MelnikNo ratings yet
- Refrigeration Troubleshooting GuideDocument8 pagesRefrigeration Troubleshooting GuideJuan Jose Ramirez CorralesNo ratings yet
- Chapter 4-Behavior Evaluation of Vehicule Materials-Lecture 2Document44 pagesChapter 4-Behavior Evaluation of Vehicule Materials-Lecture 2roy barmoNo ratings yet
- Power Cable Installation ManualDocument50 pagesPower Cable Installation ManualAnn DodsonNo ratings yet
- APPENDIX A B C Pump Specifications Vantage 5000 EN v1.7 July 2019Document14 pagesAPPENDIX A B C Pump Specifications Vantage 5000 EN v1.7 July 2019cerro GranadaNo ratings yet
- Shell and Tube Heat Exchanger Sample Problem and SolutionDocument9 pagesShell and Tube Heat Exchanger Sample Problem and Solutionlouisealfonzo.chanNo ratings yet
- Electrical Engineering SolutionsDocument14 pagesElectrical Engineering SolutionsJustine Kyla OlivarNo ratings yet
- Foundationxpart 1Document3 pagesFoundationxpart 1Haydeesheen SisonNo ratings yet
- New Radar Technology 8 500-10 500 MHZ BandDocument18 pagesNew Radar Technology 8 500-10 500 MHZ BandChinmaya_Mishr_4215No ratings yet
- Sink CSMDocument2 pagesSink CSMZulfiqar AhmedNo ratings yet
- 2020-2021 S5 - M2 - Half-Yearly Exam (With Marking Scheme)Document35 pages2020-2021 S5 - M2 - Half-Yearly Exam (With Marking Scheme)15 15No ratings yet
- Form 2 Math Chapter 10Document4 pagesForm 2 Math Chapter 10velavanNo ratings yet
- MN Doped With Ni-MOFDocument8 pagesMN Doped With Ni-MOFBilal KhalidNo ratings yet
- Word File PDFDocument4 pagesWord File PDFanusha kNo ratings yet
- C15 and C18 Generator SetDocument4 pagesC15 and C18 Generator Setspider blackNo ratings yet
- A Case Study of Analysis of Technical and Non Technical Losses in Power System and Its Impact On Power SectorDocument10 pagesA Case Study of Analysis of Technical and Non Technical Losses in Power System and Its Impact On Power Sectoraniket khuleNo ratings yet
- Steel Beam BracketDocument10 pagesSteel Beam BracketMohammed AyeshNo ratings yet
- Field-Effect Transistor: HistoryDocument7 pagesField-Effect Transistor: HistoryVinay SinghNo ratings yet
- DPP-2 (Coulomb's Law and Principle of Superposition)Document6 pagesDPP-2 (Coulomb's Law and Principle of Superposition)Youtuber RSNo ratings yet
- 2502 Series LeveltrolDocument24 pages2502 Series LeveltrolayoubNo ratings yet
- 48 TM 004007Document60 pages48 TM 004007Joseph DavidNo ratings yet
- DC 70D ManualDocument17 pagesDC 70D ManualAnonymous vqsuRyNo ratings yet
- Cambridge International Examinations Cambridge International General Certificate of Secondary EducationDocument20 pagesCambridge International Examinations Cambridge International General Certificate of Secondary EducationequakeroatsNo ratings yet
- Design: Securing Bushes: Interference FitsDocument2 pagesDesign: Securing Bushes: Interference FitsSubrat pandaNo ratings yet
- Cardinal Points and Types of NorthDocument18 pagesCardinal Points and Types of NorthKrishnanshu MishraNo ratings yet
- Hempadur 15130Document2 pagesHempadur 15130MuthuKumarNo ratings yet
- 3D Numerical Modelling of Open Channel Flow With Submerged VegetationDocument9 pages3D Numerical Modelling of Open Channel Flow With Submerged VegetationIhtesham KhanNo ratings yet
- Gen Chem 3rd QuarterDocument6 pagesGen Chem 3rd QuarterzafmustaphaNo ratings yet
- Orange Research Catalog SmallDocument32 pagesOrange Research Catalog SmallLuz Stella Calixto GomezNo ratings yet
- Thumb Rules - Xls For Chemical EngineerDocument46 pagesThumb Rules - Xls For Chemical EngineerAnuj KaliyerNo ratings yet