You might also like
- BALBI MAGAUDDA - A History of Digital MediaDocument297 pagesBALBI MAGAUDDA - A History of Digital MediaAndré BonsantoNo ratings yet
- Motivate! 1 Test U9 Basic PDF ClothingDocument1 pageMotivate! 1 Test U9 Basic PDF ClothingMarcela BereczovaNo ratings yet
- Introduction To Digital Control Systems - Lecture NotesDocument4 pagesIntroduction To Digital Control Systems - Lecture Notessridharparthipan100% (1)
- Machinery Diagnostic PlotsDocument16 pagesMachinery Diagnostic Plotsfazzlie100% (1)
- Tarea 07Document2 pagesTarea 07RudyNo ratings yet
- 2A2 Signal Conditioning L1 Notes CollinsDocument138 pages2A2 Signal Conditioning L1 Notes CollinsKev107No ratings yet
- Weekly PP PDFDocument11 pagesWeekly PP PDFDanielHaileNo ratings yet
- Digital Control Systems: Lecture NotesDocument61 pagesDigital Control Systems: Lecture NotesHari Pavan0391No ratings yet
- Chapter 2 Discrete Data Control SystemsDocument78 pagesChapter 2 Discrete Data Control SystemsAmruth ThelkarNo ratings yet
- Analysis of Bluetooth-Based Wireless Sensor Networks Performance in Hospital EnvironmentsDocument6 pagesAnalysis of Bluetooth-Based Wireless Sensor Networks Performance in Hospital EnvironmentsRehan MalikNo ratings yet
- DSP Imp QuestionDocument22 pagesDSP Imp QuestionDevika KachhawahaNo ratings yet
- A Simulation Tool For Evaluating Digital Camera Image QualityDocument8 pagesA Simulation Tool For Evaluating Digital Camera Image QualityTùng NguyễnNo ratings yet
- Adaptive Digital FiltersDocument10 pagesAdaptive Digital Filtersfantastic05No ratings yet
- DSP Unit1Document16 pagesDSP Unit1Charlton ChristNo ratings yet
- Sensor TechnologyDocument6 pagesSensor TechnologyAruna AkkiNo ratings yet
- Recent Advances in Sensor Technology: Hans-Rolf Tränkler, Olfa KanounDocument8 pagesRecent Advances in Sensor Technology: Hans-Rolf Tränkler, Olfa KanounHarsimran KaurNo ratings yet
- Design and Implementation of Real Time Electronic Stethoscope With A Method For Separating Heart Sound From Lung Sound Using TMS320C6713 DSKDocument12 pagesDesign and Implementation of Real Time Electronic Stethoscope With A Method For Separating Heart Sound From Lung Sound Using TMS320C6713 DSKrajkumarpaniNo ratings yet
- Modal Analysis and Condition MonitoringDocument5 pagesModal Analysis and Condition Monitoringbidyutkr30100% (2)
- Volume 3 - Number 1 - Tools For Microwave Radio Communications System DesignDocument13 pagesVolume 3 - Number 1 - Tools For Microwave Radio Communications System DesignArter AlayNo ratings yet
- Discrete Systems Z TransfrmDocument5 pagesDiscrete Systems Z TransfrmAlie FavourNo ratings yet
- Ece-V-digital Signal Processing U8Document21 pagesEce-V-digital Signal Processing U8madhusudhanNo ratings yet
- JNTUA Digital Signal Processing Notes - R20Document88 pagesJNTUA Digital Signal Processing Notes - R20durgatathaNo ratings yet
- Phasor Measurement Unit Technology and ItsDocument4 pagesPhasor Measurement Unit Technology and ItsVedaste NdayishimiyeNo ratings yet
- Chapter 2 Discrete Data Control SystemsDocument70 pagesChapter 2 Discrete Data Control SystemsAmruth Thelkar67% (3)
- Introduction To Digital Control SystemDocument47 pagesIntroduction To Digital Control SystemNexusNo ratings yet
- 111 1501139444 - 27-07-2017 PDFDocument3 pages111 1501139444 - 27-07-2017 PDFEditor IJRITCCNo ratings yet
- A F A E: Daptive Iltering Pplications XplainedDocument15 pagesA F A E: Daptive Iltering Pplications XplainedbermanNo ratings yet
- ANCDocument24 pagesANCManish GaurNo ratings yet
- Dual Channel FFT Analysis - Part1Document60 pagesDual Channel FFT Analysis - Part1Won-young SeoNo ratings yet
- Connections (Mathematics - Phy - Chem) J4Document10 pagesConnections (Mathematics - Phy - Chem) J4hana215mohamedNo ratings yet
- Introduction To Data Acquisition: TutorialDocument6 pagesIntroduction To Data Acquisition: TutorialAnkur GargNo ratings yet
- 403 Lab1 Intro To Spectral Analysis 092006Document16 pages403 Lab1 Intro To Spectral Analysis 092006Dehri BrahimNo ratings yet
- Mechatronics - MODULE 1 - Yajnesha P ShettigarDocument35 pagesMechatronics - MODULE 1 - Yajnesha P ShettigarAYUSH CHANDRANo ratings yet
- All Digital Timing Recovery and FPGA Implementation: Daniel Cárdenas, Germán ArévaloDocument6 pagesAll Digital Timing Recovery and FPGA Implementation: Daniel Cárdenas, Germán Arévalom0hmdNo ratings yet
- En - MEMS Condition MonitoringDocument17 pagesEn - MEMS Condition MonitoringbogodavidNo ratings yet
- Sweep in Acoustic Vs VibrationsDocument2 pagesSweep in Acoustic Vs Vibrationsgreat debestNo ratings yet
- Digital Signal Processing: M.SivakumarDocument44 pagesDigital Signal Processing: M.Sivakumarsivakumar100% (1)
- Digital Signal Processing Sem 5Document15 pagesDigital Signal Processing Sem 5shuvamsikder0No ratings yet
- A Sigmoid Function Based Feedback Filtered-X-LMS Algorithm With Improved Offline ModellingDocument5 pagesA Sigmoid Function Based Feedback Filtered-X-LMS Algorithm With Improved Offline ModellingArash TorkamanNo ratings yet
- CBCS-Syllabus VII VIII Sem 2022-2023Document41 pagesCBCS-Syllabus VII VIII Sem 2022-2023Vivek BendeNo ratings yet
- Eng-Function Based Optimized-Mohamed AfifiDocument14 pagesEng-Function Based Optimized-Mohamed AfifiImpact JournalsNo ratings yet
- Design of A Real-Time Spindle Health Monitoring and Diagnosis SystemDocument4 pagesDesign of A Real-Time Spindle Health Monitoring and Diagnosis SystemVintilescu AlinaNo ratings yet
- Ece308 1Document7 pagesEce308 1freeTerpNo ratings yet
- 18ee63 DSP Module-4Document18 pages18ee63 DSP Module-4Appasabgouda BiradarNo ratings yet
- Introduction ADSP IF21Document48 pagesIntroduction ADSP IF21DrIhsan Ul HaqNo ratings yet
- IntroductionDocument31 pagesIntroductionwhizkidNo ratings yet
- Mechatronics Notes PDFDocument188 pagesMechatronics Notes PDFharish100% (1)
- A Coherency-Based Approach For Signal SelectionDocument10 pagesA Coherency-Based Approach For Signal SelectionRabbuni GangavarapuNo ratings yet
- Digital Modulation I August09Document14 pagesDigital Modulation I August09gzb012No ratings yet
- Introduction To Digital Control SystemDocument20 pagesIntroduction To Digital Control SystemApril SurNo ratings yet
- Hyperspectral Imaging System Modeling: John P. Kerekes and Jerrold E. BaumDocument14 pagesHyperspectral Imaging System Modeling: John P. Kerekes and Jerrold E. Baum'Kesowo Hari MurtiNo ratings yet
- Digital Signal ProcessingDocument8 pagesDigital Signal Processingmattew657No ratings yet
- Mechanical Vibration AnalysisDocument7 pagesMechanical Vibration Analysisapi-135846491No ratings yet
- RF SimulationDocument10 pagesRF SimulationYasser AbrahantesNo ratings yet
- Comparisons of Adaptive Median Filter Based On Homogeneity Level Information and The New Generation FiltersDocument5 pagesComparisons of Adaptive Median Filter Based On Homogeneity Level Information and The New Generation FiltersInternational Organization of Scientific Research (IOSR)No ratings yet
- Wavelet Based DVR FOR POWER QUALITY IMPROVEMENTDocument7 pagesWavelet Based DVR FOR POWER QUALITY IMPROVEMENTpardhu_y4No ratings yet
- Remote Sensing Satellite Data Demodulation and Bit Synchronization-2Document12 pagesRemote Sensing Satellite Data Demodulation and Bit Synchronization-2IAEME PublicationNo ratings yet
- Digital Image Forensics Using Sensor Noise: Jessica FridrichDocument11 pagesDigital Image Forensics Using Sensor Noise: Jessica FridrichPushpa Mohan RajNo ratings yet
- Signal Integrity: From High-Speed to Radiofrequency ApplicationsFrom EverandSignal Integrity: From High-Speed to Radiofrequency ApplicationsNo ratings yet
- Digital Signal Processing: Instant AccessFrom EverandDigital Signal Processing: Instant AccessRating: 3.5 out of 5 stars3.5/5 (2)
- Expose Sur La TechnologyDocument8 pagesExpose Sur La Technologykouadio3.nguessanNo ratings yet
- Exploring Sound Worksheet 5 1 1 1Document3 pagesExploring Sound Worksheet 5 1 1 1api-643242343No ratings yet
- Seminar On Search Engine OptimizationDocument15 pagesSeminar On Search Engine OptimizationAkash JangraNo ratings yet
- Chapter 17 - C++ Classes: Part II: 2000 Prentice Hall, Inc. All Rights ReservedDocument52 pagesChapter 17 - C++ Classes: Part II: 2000 Prentice Hall, Inc. All Rights ReservedDODINo ratings yet
- Features: 2-Port 10/100/1000Base-T + 2-Port 100/1000Base-X L2 OAM Managed Switch (EDD)Document2 pagesFeatures: 2-Port 10/100/1000Base-T + 2-Port 100/1000Base-X L2 OAM Managed Switch (EDD)Jesus Christ est digne d'adorationNo ratings yet
- BW & Bi SecurityDocument10 pagesBW & Bi SecurityAruna Sukeerthi100% (1)
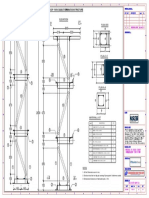
- 110KV Cable Termination StructureDocument1 page110KV Cable Termination Structureisan.structural TjsvgalavanNo ratings yet
- Logic Gates: Structural ModellingDocument3 pagesLogic Gates: Structural ModellingDivyaNo ratings yet
- NC101 Module 2Document6 pagesNC101 Module 2Sarah May Nacion MorescoNo ratings yet
- Manual Radio Stonex S9Document8 pagesManual Radio Stonex S9AlvartoNo ratings yet
- How To Make A Printed Circuit Board (PCB)Document22 pagesHow To Make A Printed Circuit Board (PCB)jackNo ratings yet
- UNIX-to-Linux Migration For The Modern EnterpriseDocument7 pagesUNIX-to-Linux Migration For The Modern EnterprisetemozNo ratings yet
- HuaweiDocument56 pagesHuaweiwbwfalwcbggsr logicstreakNo ratings yet
- Universal Digital Repeater DR-109: Technical DocumentationDocument16 pagesUniversal Digital Repeater DR-109: Technical DocumentationSergeyNo ratings yet
- ABAP Query Tutorial in SAP - SQ01, SQ02, SQ03Document8 pagesABAP Query Tutorial in SAP - SQ01, SQ02, SQ03Atreya PuranikNo ratings yet
- Data Science AssignmentDocument5 pagesData Science AssignmentAjay PrakashNo ratings yet
- DP 4 3 PracticeDocument3 pagesDP 4 3 PracticeNiiaNo ratings yet
- Codeigniter Lecture Notes 4Document20 pagesCodeigniter Lecture Notes 4RENALYN DE VILLARNo ratings yet
- xtp600 Zcu208 Bit C 2020 1Document34 pagesxtp600 Zcu208 Bit C 2020 1Shashank MuthaNo ratings yet
- Agilent Openlab Chromatography Data System (CDS) : Hardware and Software RequirementsDocument9 pagesAgilent Openlab Chromatography Data System (CDS) : Hardware and Software RequirementsHuu TienNo ratings yet
- Research Title in Bold, Uppercase Letters Following An Inverted Pyramid Form Not Exceeding 12 WordsDocument6 pagesResearch Title in Bold, Uppercase Letters Following An Inverted Pyramid Form Not Exceeding 12 WordsAmethyst Flores100% (1)
- Manual XolidoSign V 2 2 1 en Signed by XOLIDO SYSTEMSDocument57 pagesManual XolidoSign V 2 2 1 en Signed by XOLIDO SYSTEMSΠαναγιώτης Παυλ. ΜαρούδαςNo ratings yet
- ML 5 Practical WriteupDocument3 pagesML 5 Practical WriteupTanmay SharmaNo ratings yet
- Programacion Con Macro para Corel Draw X5Document158 pagesProgramacion Con Macro para Corel Draw X5Uribe AldoNo ratings yet
- Best-Network-Security ToolsDocument7 pagesBest-Network-Security Toolsesa abrenNo ratings yet
- 2a. D BT 02. Reliability Management. 8JP. OKDocument50 pages2a. D BT 02. Reliability Management. 8JP. OKadmiralengineerNo ratings yet
- Codebot For Sap Successfactors Frequently Asked Questions: Click Here To See More of Our Benefits in A Slide Deck!Document4 pagesCodebot For Sap Successfactors Frequently Asked Questions: Click Here To See More of Our Benefits in A Slide Deck!Ali ZiaeeNo ratings yet
- Ultima™ Mentor Required Data Inputs For NSN Infrastructure PDFDocument20 pagesUltima™ Mentor Required Data Inputs For NSN Infrastructure PDFsoltechNo ratings yet