You might also like
- Improved Deep Fuzzy Clustering For Accurate and Interpretable ClassifiersDocument7 pagesImproved Deep Fuzzy Clustering For Accurate and Interpretable ClassifiersChinnu S SathishNo ratings yet
- FlannDocument8 pagesFlannNadeem UddinNo ratings yet
- Cortes 17 ADocument10 pagesCortes 17 ASaiNo ratings yet
- Mathematics 09 03216 v2Document42 pagesMathematics 09 03216 v2GabeNo ratings yet
- Can Neural Networks Be Easily Interpreted in Software Cost Estimation?Document6 pagesCan Neural Networks Be Easily Interpreted in Software Cost Estimation?jagannath_singhNo ratings yet
- Deep Subspace Clustering NetworksDocument10 pagesDeep Subspace Clustering NetworksHedy LiuNo ratings yet
- A Neural Fuzzy System For Soft Computing: Ö. Ciftcioglu M. S. Bittermann I. S. SariyildizDocument7 pagesA Neural Fuzzy System For Soft Computing: Ö. Ciftcioglu M. S. Bittermann I. S. SariyildizKRI K MANIVANNANNo ratings yet
- System Idetification NN1Document6 pagesSystem Idetification NN1Sn ProfNo ratings yet
- Mcgarry Tait Werm Ter Macintyre 1999Document6 pagesMcgarry Tait Werm Ter Macintyre 1999ashenafiNo ratings yet
- Classification by Backpropagation - A Multilayer Feed-Forward Neural Network - Defining A Network Topology - BackpropagationDocument8 pagesClassification by Backpropagation - A Multilayer Feed-Forward Neural Network - Defining A Network Topology - BackpropagationKingzlynNo ratings yet
- Deep Learning with Python: A Comprehensive Guide to Deep Learning with PythonFrom EverandDeep Learning with Python: A Comprehensive Guide to Deep Learning with PythonNo ratings yet
- Aspects of The Numerical Analysis of Neural NetworksDocument58 pagesAspects of The Numerical Analysis of Neural Networks은지No ratings yet
- ++ar Applications of Rna in Structural Eng ConceptDocument16 pages++ar Applications of Rna in Structural Eng ConceptdefrNo ratings yet
- On The Expressive Power of Deep Neural NetworksDocument8 pagesOn The Expressive Power of Deep Neural NetworksNathalia SantosNo ratings yet
- Optimum Architecture of Neural Networks Lane Following SystemDocument6 pagesOptimum Architecture of Neural Networks Lane Following SystemJ.No ratings yet
- Implementation of A Library For Artificial Neural Networks in CDocument10 pagesImplementation of A Library For Artificial Neural Networks in COscar OlivaresNo ratings yet
- A Deep Learning Approach To DNA Sequence Classification: (Ricrizzo, Fiannaca, Larosa, Urso) @pa - Icar.cnr - ItDocument12 pagesA Deep Learning Approach To DNA Sequence Classification: (Ricrizzo, Fiannaca, Larosa, Urso) @pa - Icar.cnr - ItArpita SahaNo ratings yet
- Artificial Neural NetworksDocument23 pagesArtificial Neural NetworksAbhimanyuSriNo ratings yet
- Design and Training For Combinational Neural-Logic SystemsDocument8 pagesDesign and Training For Combinational Neural-Logic SystemsSamuel AdamuNo ratings yet
- On The Number of Linear Regions of Deep Neural NetworksDocument9 pagesOn The Number of Linear Regions of Deep Neural NetworksNathalia SantosNo ratings yet
- Vasilic2005Document9 pagesVasilic2005fernando ceballosNo ratings yet
- CNN Eem305Document7 pagesCNN Eem305api-330059482100% (1)
- Deep Learning in Astronomy - VIVEK KUMARDocument6 pagesDeep Learning in Astronomy - VIVEK KUMARAniket SujayNo ratings yet
- Multilayer Perceptron: Architecture Optimization and TrainingDocument5 pagesMultilayer Perceptron: Architecture Optimization and TrainingaliceNo ratings yet
- Multilayer Perceptron PDFDocument5 pagesMultilayer Perceptron PDFAquacypressNo ratings yet
- Null Models in Network Neuroscience: František Váša and Bratislav MišiDocument12 pagesNull Models in Network Neuroscience: František Váša and Bratislav Mišisifa.santNo ratings yet
- Scribed Lecture 0Document4 pagesScribed Lecture 0Roshan :No ratings yet
- OverDocument22 pagesOverYosef JosephNo ratings yet
- KursorDocument11 pagesKursorPaulina MelialaNo ratings yet
- Isbi 2011 5872414Document4 pagesIsbi 2011 5872414nainasingh2205No ratings yet
- Neural Network EnsemblesDocument9 pagesNeural Network EnsembleskronalizedNo ratings yet
- Implementations of Learning Control Systems Using Neural NetworksDocument9 pagesImplementations of Learning Control Systems Using Neural NetworksS KhatibNo ratings yet
- Review of Fuzzy Logic and Neural Network: Kumar Ashish, Arun Shukla, Omkar A.Rai, Deepak Kr. RayDocument2 pagesReview of Fuzzy Logic and Neural Network: Kumar Ashish, Arun Shukla, Omkar A.Rai, Deepak Kr. RayerpublicationNo ratings yet
- Understanding Convolutional Neural Networks With A Mathematical ModelDocument21 pagesUnderstanding Convolutional Neural Networks With A Mathematical ModelVarunNo ratings yet
- Deep LearningDocument24 pagesDeep Learningadrian sanchezNo ratings yet
- 1) Image Encryption Using Chaotic Based Artificial Neural Network PDFDocument4 pages1) Image Encryption Using Chaotic Based Artificial Neural Network PDFAyshNo ratings yet
- Ijser: Image Encryption Using Chaotic Based Artificial Neural NetworkDocument4 pagesIjser: Image Encryption Using Chaotic Based Artificial Neural NetworkbhattajagdishNo ratings yet
- Understanding The Feedforward Artificial Neural Network Model From The Perspective of Network FlowDocument14 pagesUnderstanding The Feedforward Artificial Neural Network Model From The Perspective of Network Flow21amrikamaharajNo ratings yet
- Convolutional Neural Network - WikipediaDocument21 pagesConvolutional Neural Network - Wikipediayadavghyam2001No ratings yet
- Deep Cascade LearningDocument11 pagesDeep Cascade Learningcoelho.alv4544No ratings yet
- The Deep Learning Random Neural NetworkDocument12 pagesThe Deep Learning Random Neural Networkfuzzy_slugNo ratings yet
- DL Unit 3 Jntuk r20Document47 pagesDL Unit 3 Jntuk r20gdsc.pragatiNo ratings yet
- Anfis NoteDocument15 pagesAnfis NoteNimoNo ratings yet
- Constructive Learning and Structural LearningDocument6 pagesConstructive Learning and Structural LearningEr Shivam GuptaNo ratings yet
- A Generation Method For Using Neural Networks With Planar Lattice ArchitectureDocument6 pagesA Generation Method For Using Neural Networks With Planar Lattice Architecturemgaz72No ratings yet
- Extraction of Rules With PSODocument4 pagesExtraction of Rules With PSONaren PathakNo ratings yet
- Toward Deeper Understanding of Neural Networks: The Power of Initialization and A Dual View On ExpressivityDocument36 pagesToward Deeper Understanding of Neural Networks: The Power of Initialization and A Dual View On ExpressivityMiguel AngelNo ratings yet
- Weather Forecasting IIT KANPURDocument6 pagesWeather Forecasting IIT KANPURashutosh nagayachNo ratings yet
- Face Recognition Based On Chaotic Fuzzy RBF Neural Network: Meng Jian-Liang Gao Wan-Qing Pang Hui-Jing Niu Wei-HuaDocument4 pagesFace Recognition Based On Chaotic Fuzzy RBF Neural Network: Meng Jian-Liang Gao Wan-Qing Pang Hui-Jing Niu Wei-HuaHarry YuliansyahNo ratings yet
- Lecure 1 - IntroductionDocument45 pagesLecure 1 - Introductionvandunggroup5526No ratings yet
- Deep Neural Network Approximation TheoryDocument80 pagesDeep Neural Network Approximation TheorynothardNo ratings yet
- Rule Extraction Using Artificial Neural Networks: S. M. Kamruzzaman Ahmed Ryadh HasanDocument14 pagesRule Extraction Using Artificial Neural Networks: S. M. Kamruzzaman Ahmed Ryadh Hasanzayyanu yunusaNo ratings yet
- Neural Network Technique in The Study of Selected Chemical Engineering Unit Operations Data Using MatlabDocument8 pagesNeural Network Technique in The Study of Selected Chemical Engineering Unit Operations Data Using MatlabSepribo BraideNo ratings yet
- Institute of Engineering and Technology Davv, Indore: Lab Assingment OnDocument14 pagesInstitute of Engineering and Technology Davv, Indore: Lab Assingment OnNikhil KhatloiyaNo ratings yet
- Neural Operator Graph Kernel Network For Partial Differential EquationsDocument21 pagesNeural Operator Graph Kernel Network For Partial Differential Equations梁帅哲No ratings yet
- A Hybrid Recurrent Neural Networks Architecture Inspired by Hidden Markov Models: Training and Extraction of Deterministic Finite AutomatonDocument8 pagesA Hybrid Recurrent Neural Networks Architecture Inspired by Hidden Markov Models: Training and Extraction of Deterministic Finite AutomatonrohitashNo ratings yet
- Learning in Memristive Neural Network Architectures Using Analog Backpropagation CircuitsDocument14 pagesLearning in Memristive Neural Network Architectures Using Analog Backpropagation CircuitsHussain Bin AliNo ratings yet
- SNN Vs CNN On Supervised LearningDocument5 pagesSNN Vs CNN On Supervised LearningShimanto BhoumikNo ratings yet
- Fuzzy Logic and Expert Systems ApplicationsFrom EverandFuzzy Logic and Expert Systems ApplicationsRating: 5 out of 5 stars5/5 (1)
- Convolutional Neural Networks in Python: Beginner's Guide to Convolutional Neural Networks in PythonFrom EverandConvolutional Neural Networks in Python: Beginner's Guide to Convolutional Neural Networks in PythonNo ratings yet
- Welding Chart The Complete Reference Guide To WeldingDocument2 pagesWelding Chart The Complete Reference Guide To WeldingJitu JenaNo ratings yet
- Brand Trust, Customer SatisfacDocument21 pagesBrand Trust, Customer SatisfacJar JarNo ratings yet
- Golden Field Farmers Multi-Purpose Cooperative: Palay ProductionDocument3 pagesGolden Field Farmers Multi-Purpose Cooperative: Palay ProductionAps BautistaNo ratings yet
- 18c Effective Telephone CommunicationDocument78 pages18c Effective Telephone CommunicationJan Cleo Cerdiña QuijanoNo ratings yet
- MCD2000CM4 T1 014 (8 7 12) - CompleteDocument1,062 pagesMCD2000CM4 T1 014 (8 7 12) - CompletePablo Marchant TorresNo ratings yet
- Stanley Diamond Toward A Marxist AnthropologyDocument504 pagesStanley Diamond Toward A Marxist AnthropologyZachNo ratings yet
- Consumer Behaviour-Kiran GDocument9 pagesConsumer Behaviour-Kiran GVaibhav KhandelwalNo ratings yet
- Bangladesh PoliceDocument17 pagesBangladesh PoliceCpsMinhazulIslamNo ratings yet
- Technical Report Documentation PageDocument176 pagesTechnical Report Documentation Pagepacotao123No ratings yet
- 1.1.4.A PulleyDrivesSprockets FinishedDocument4 pages1.1.4.A PulleyDrivesSprockets FinishedJacob DenkerNo ratings yet
- Sendik's Oconomowoc Press AnnouncementDocument2 pagesSendik's Oconomowoc Press AnnouncementTMJ4 NewsNo ratings yet
- 10 Professional Tax Software Must-Haves White PaperDocument2 pages10 Professional Tax Software Must-Haves White PaperRakesh KumarNo ratings yet
- CF34-10E LM June 09 Print PDFDocument301 pagesCF34-10E LM June 09 Print PDFPiipe780% (5)
- Hazard ManagementDocument18 pagesHazard Managementsthiyagu0% (1)
- Mil DTL 11891g EngDocument96 pagesMil DTL 11891g EngJohn DrakosNo ratings yet
- 2.21 - Hazard Identification Form - Fall ProtectionDocument3 pages2.21 - Hazard Identification Form - Fall ProtectionSn AhsanNo ratings yet
- Health Tech Industry Accounting Guide 2023Document104 pagesHealth Tech Industry Accounting Guide 2023sabrinaNo ratings yet
- 7 - 8 CSS - WK 3 Ergonomic Guidelines For Computer Workstations - Jesucrtina NimenzoDocument6 pages7 - 8 CSS - WK 3 Ergonomic Guidelines For Computer Workstations - Jesucrtina NimenzoEdelmar BenosaNo ratings yet
- Metrobank (Strengths)Document6 pagesMetrobank (Strengths)Hera IgnatiusNo ratings yet
- Ips M PM 330Document25 pagesIps M PM 330Deborah MalanumNo ratings yet
- BOM For Solar Water PumpDocument11 pagesBOM For Solar Water PumpNirat PatelNo ratings yet
- Define Technical Settings For All Involved Systems: PrerequisitesDocument2 pagesDefine Technical Settings For All Involved Systems: PrerequisitesGK SKNo ratings yet
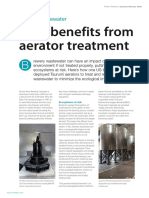
- Beer Benefits From Aerator TreatmentDocument2 pagesBeer Benefits From Aerator TreatmentSam MurrayNo ratings yet
- Creating A New Silk UI ApplicationDocument2 pagesCreating A New Silk UI Applicationtsultim bhutiaNo ratings yet
- 4 5827923419810760428Document250 pages4 5827923419810760428T M Santhosh KumarNo ratings yet
- PEL 20161201 Dec 2016Document76 pagesPEL 20161201 Dec 2016RémiNo ratings yet
- Sexual Hazartment of Women at OfficeDocument3 pagesSexual Hazartment of Women at OfficeMohandas PeriyasamyNo ratings yet
- Nipcib 000036Document273 pagesNipcib 000036AlfoFS0% (1)
- Gardner Gary ResumeDocument1 pageGardner Gary ResumeGary GardnerNo ratings yet
- SM 6Document116 pagesSM 6陳偉泓No ratings yet