You might also like
- AI Assigment2Document3 pagesAI Assigment2PhilNo ratings yet
- Logistic RegressionDocument14 pagesLogistic RegressionYogesh RaiNo ratings yet
- Unit IDocument14 pagesUnit Imananrawat537No ratings yet
- CS601 - Machine Learning - Unit 2 - Notes - 1672759753Document14 pagesCS601 - Machine Learning - Unit 2 - Notes - 1672759753mohit jaiswalNo ratings yet
- 2 Dealing With Logistic RegressionDocument4 pages2 Dealing With Logistic RegressionPrabin GhimireNo ratings yet
- Describe in Brief Different Types of Regression AlgorithmsDocument25 pagesDescribe in Brief Different Types of Regression AlgorithmsRajeshree JadhavNo ratings yet
- CS 3035 (ML) - CS - End - May - 2023Document11 pagesCS 3035 (ML) - CS - End - May - 2023Rachit SrivastavNo ratings yet
- 2-Logistic RegressionDocument15 pages2-Logistic Regressionabdala sabryNo ratings yet
- Notes 2Document22 pagesNotes 2Abhi ReddyNo ratings yet
- Logistic - Poly RegressionDocument13 pagesLogistic - Poly RegressionAmrin MulaniNo ratings yet
- Regression Analysis in Machine LearningDocument9 pagesRegression Analysis in Machine Learningshreya sarkarNo ratings yet
- Logistic RegressionDocument8 pagesLogistic RegressionRahul sharmaNo ratings yet
- Introduction To Machine Learning Week 2 AssignmentDocument8 pagesIntroduction To Machine Learning Week 2 AssignmentAkash barapatreNo ratings yet
- ML Assignment3 SolutionDocument13 pagesML Assignment3 SolutionNeha GowdaNo ratings yet
- Linear - Regression & Evaluation MetricsDocument31 pagesLinear - Regression & Evaluation Metricsreshma acharyaNo ratings yet
- 02 LRDocument11 pages02 LRDebashish DekaNo ratings yet
- CH 4 Multiple Regression ModelsDocument28 pagesCH 4 Multiple Regression Modelspkj009No ratings yet
- Bda 1Document28 pagesBda 1Ikhsan WijayaNo ratings yet
- Module 1 NotesDocument73 pagesModule 1 Notes20EUIT173 - YUVASRI KB100% (1)
- Machine LearningDocument22 pagesMachine LearningSandeep TanwarNo ratings yet
- Unit - Iii Data AnalysisDocument39 pagesUnit - Iii Data AnalysisPRIYAM XEROXNo ratings yet
- Unit 5Document104 pagesUnit 5downloadjain123No ratings yet
- Analytics CompendiumDocument41 pagesAnalytics Compendiumshubham markadNo ratings yet
- Logistics Regression NotesDocument12 pagesLogistics Regression Notesshruti guptaNo ratings yet
- RegressionDocument39 pagesRegressionPradeepNo ratings yet
- Dependent Independent Variable (S) : Regression: What Is RegressionDocument15 pagesDependent Independent Variable (S) : Regression: What Is Regressionitsnithin_tsNo ratings yet
- 5 ClassificationDocument72 pages5 Classificationsharad100% (1)
- TOD 212 - PPT 1 For Students - Monsoon 2023Document26 pagesTOD 212 - PPT 1 For Students - Monsoon 2023dhyani.sNo ratings yet
- Bike Assignment - Subjective SolDocument5 pagesBike Assignment - Subjective SolSoumik BharNo ratings yet
- Regression Analysis in Machine LearningDocument26 pagesRegression Analysis in Machine Learningvepowo LandryNo ratings yet
- 2023 Statistics Fin 10Document14 pages2023 Statistics Fin 10TNo ratings yet
- Linear Regression Vs Logistic RegressionDocument2 pagesLinear Regression Vs Logistic RegressionDeepak PadiyarNo ratings yet
- Machine Learning Questions and Answers For InterviewDocument20 pagesMachine Learning Questions and Answers For InterviewVijaykumarNo ratings yet
- Regression: UNIT - V Regression ModelDocument21 pagesRegression: UNIT - V Regression ModelMadhura PardeshiNo ratings yet
- U02Lecture06 RegressionDocument25 pagesU02Lecture06 Regressiontunio.bscsf21No ratings yet
- Unit 2Document19 pagesUnit 2bushrajameel88No ratings yet
- ML Assignment 2: Tutorial: Linear Regression With Stochastic Gradient Descent - by Raimi Karim - Towards Data ScienceDocument3 pagesML Assignment 2: Tutorial: Linear Regression With Stochastic Gradient Descent - by Raimi Karim - Towards Data SciencesonuNo ratings yet
- Machine Learning PrepDocument9 pagesMachine Learning PrepRupesh GaurNo ratings yet
- Regression Models: by Mayuri BhandariDocument64 pagesRegression Models: by Mayuri BhandarimayuriNo ratings yet
- Machine Learning Algorithns - Unit3Document124 pagesMachine Learning Algorithns - Unit3XY ZNo ratings yet
- Regression AnalysisDocument15 pagesRegression Analysisdolly kate cagadasNo ratings yet
- Unit VDocument27 pagesUnit V05Bala SaatvikNo ratings yet
- Top 100 ML Interview Q&ADocument39 pagesTop 100 ML Interview Q&Agsunanda038100% (1)
- Machine Learning in Python - Course NotesDocument36 pagesMachine Learning in Python - Course NotesMaRoua AbdelhafidhNo ratings yet
- Unit 3c Linear RegressionDocument98 pagesUnit 3c Linear RegressionMadhav ChaudharyNo ratings yet
- Business Analytics: Advance: Simple & Multiple Linear RegressionDocument38 pagesBusiness Analytics: Advance: Simple & Multiple Linear RegressionKetan BhaleraoNo ratings yet
- New End - Course - Summative - AssignmentDocument13 pagesNew End - Course - Summative - AssignmentharithaamohansbyNo ratings yet
- Machine Learning Question Bank-Unit 3Document6 pagesMachine Learning Question Bank-Unit 3INFRA 10'SNo ratings yet
- Datamining Lecture6Document41 pagesDatamining Lecture6Vi LeNo ratings yet
- Review Econometrics: Mohammad ObaidullahDocument37 pagesReview Econometrics: Mohammad ObaidullahMohammad ObaidullahNo ratings yet
- SLM CO2 Session12Document6 pagesSLM CO2 Session12Suraj KumarNo ratings yet
- DS Unit 2 Essay AnswersDocument17 pagesDS Unit 2 Essay AnswersSavitha ElluruNo ratings yet
- UNIt-3 TYDocument67 pagesUNIt-3 TYPrathmesh Mane DeshmukhNo ratings yet
- RegressionDocument14 pagesRegressionreduanullah nawshadNo ratings yet
- LLM ML Interview QDocument43 pagesLLM ML Interview QYagnesh VyasNo ratings yet
- Linear Regression: Student: Mohammed Abu Musameh Supervisor: Eng. Akram Abu GaradDocument35 pagesLinear Regression: Student: Mohammed Abu Musameh Supervisor: Eng. Akram Abu GaradIbrahim IsleemNo ratings yet
- Chapter 6 (Part I)Document40 pagesChapter 6 (Part I)Natasha Ghazali0% (1)
- Regression in M.LDocument13 pagesRegression in M.LSaif JuttNo ratings yet
- Logistic RegressionDocument16 pagesLogistic RegressionBhakti BetageriNo ratings yet
- Unit 1 Ccws QBDocument34 pagesUnit 1 Ccws QBgiryahaiNo ratings yet
- CRM Qbu1separateDocument39 pagesCRM Qbu1separategiryahaiNo ratings yet
- Wa0029.Document4 pagesWa0029.giryahaiNo ratings yet
- 11th EVS AssignmentDocument1 page11th EVS AssignmentgiryahaiNo ratings yet
- DWDW Practical Writeup (4-4-24)Document9 pagesDWDW Practical Writeup (4-4-24)giryahaiNo ratings yet
- Notes Comming SoonDocument1 pageNotes Comming SoongiryahaiNo ratings yet
- After-Sales-Management and Customer ServiceDocument5 pagesAfter-Sales-Management and Customer ServiceJoao PauloNo ratings yet
- Photolab-X: Gaurang Binani (20Bcs5154) Ritik Kumar Kharwar (20Bcs5126) SWAPNIL (20BCS5150) Bhavesh Dwivedi (20Bcs5162)Document19 pagesPhotolab-X: Gaurang Binani (20Bcs5154) Ritik Kumar Kharwar (20Bcs5126) SWAPNIL (20BCS5150) Bhavesh Dwivedi (20Bcs5162)Gaurang BinaniNo ratings yet
- Project - IntroductionDocument18 pagesProject - IntroductionAmedu EmmanuelNo ratings yet
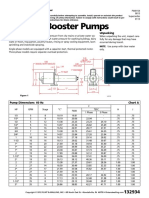
- FWPB Booster Pumps InstructionsDocument15 pagesFWPB Booster Pumps InstructionsRamadanNo ratings yet
- Discrete Output (P - DOut)Document50 pagesDiscrete Output (P - DOut)jgtesta3934No ratings yet
- Computers and Other Devices: Linksys E1000 Chapter 2: Cisco ConnectDocument5 pagesComputers and Other Devices: Linksys E1000 Chapter 2: Cisco ConnectJeffreyNo ratings yet
- Problems s7Document4 pagesProblems s7zangue billy jamesNo ratings yet
- Sigma Supplies Luster Ribbon SsDocument2 pagesSigma Supplies Luster Ribbon SsDeng FlynnNo ratings yet
- CNG Kits 468 CylinderDocument13 pagesCNG Kits 468 CylinderRoberto HernandezNo ratings yet
- Raychem DS Eu1422 E150 enDocument2 pagesRaychem DS Eu1422 E150 enTrung Trinh BaoNo ratings yet
- Premill Horizontal Roller Mill enDocument6 pagesPremill Horizontal Roller Mill enrecaiNo ratings yet
- "Title": Design and Fabrication of Bluetooth Controlled Robotic Cleaning MachineDocument26 pages"Title": Design and Fabrication of Bluetooth Controlled Robotic Cleaning MachineSrushti KatkarNo ratings yet
- MZ Es 125 and Es 150 Repair Manual 1966 English 100Document80 pagesMZ Es 125 and Es 150 Repair Manual 1966 English 100USUARIO1218No ratings yet
- ' Nmae G (Ptye. Aw Subaexmãri Iloyte. Smygbaexivcare (Éavnam Svéavt, Lbxbaexaedya NND - 1. Êpaid Pâvgaery Ivñmetavdev IhDocument8 pages' Nmae G (Ptye. Aw Subaexmãri Iloyte. Smygbaexivcare (Éavnam Svéavt, Lbxbaexaedya NND - 1. Êpaid Pâvgaery Ivñmetavdev IhMangaldip MukherjeeNo ratings yet
- Shrapnel White PaperDocument42 pagesShrapnel White PaperdelgiudiceinvestimentiNo ratings yet
- DF-629 Installation Manual: 1. Accessory PartsDocument10 pagesDF-629 Installation Manual: 1. Accessory PartsANDY BNo ratings yet
- SAURE LEICA IWAA2018 Laser Tracker StandardsDocument10 pagesSAURE LEICA IWAA2018 Laser Tracker Standardscmm5477No ratings yet
- DLL Nov 5, 2019 MonolingguwalismoDocument5 pagesDLL Nov 5, 2019 MonolingguwalismoJeppssy Marie Concepcion MaalaNo ratings yet
- Unit Progress Test 3 - Version BDocument12 pagesUnit Progress Test 3 - Version BluisNo ratings yet
- B737-B787 QRH Differences: 787 NNC Includes Emergency DescentDocument13 pagesB737-B787 QRH Differences: 787 NNC Includes Emergency DescentUfuk AydinNo ratings yet
- NT Usb DatasheetDocument1 pageNT Usb DatasheetxupaNo ratings yet
- Deep Learning With Keras and TensorflowDocument557 pagesDeep Learning With Keras and TensorflowCleiber NichidaNo ratings yet
- Q2 - Lesson 1 - Written Task - HiyasDocument3 pagesQ2 - Lesson 1 - Written Task - HiyasGaming IndustryNo ratings yet
- Preca Solutions BrochureDocument16 pagesPreca Solutions BrochurePMC - PRECANo ratings yet
- Caterpillar Forklift Trucks Fault Codes DTCDocument2 pagesCaterpillar Forklift Trucks Fault Codes DTCMahmoud MohamedNo ratings yet
- Directory of Electric CooperativesDocument11 pagesDirectory of Electric CooperativesRyan JayNo ratings yet
- Sam Koolhoven Resume 2020Document1 pageSam Koolhoven Resume 2020Sam KoolhovenNo ratings yet
- Vacuum EjectorDocument6 pagesVacuum EjectorAmol KadamNo ratings yet
- Electronics Gcse Coursework ExamplesDocument4 pagesElectronics Gcse Coursework Examplesqrsirljbf100% (2)
- 2 - LLMNRNBT-NS Poisoning With Out CredsDocument1 page2 - LLMNRNBT-NS Poisoning With Out CredsabdelrahemNo ratings yet