You might also like
- Hacks To Crush Plc Program Fast & Efficiently Everytime... : Coding, Simulating & Testing Programmable Logic Controller With ExamplesFrom EverandHacks To Crush Plc Program Fast & Efficiently Everytime... : Coding, Simulating & Testing Programmable Logic Controller With ExamplesRating: 5 out of 5 stars5/5 (1)
- Projects With Microcontrollers And PICCFrom EverandProjects With Microcontrollers And PICCRating: 5 out of 5 stars5/5 (1)
- P04700 Simulink 2nd Order 2018Document51 pagesP04700 Simulink 2nd Order 2018Fabrizio TreccarichiNo ratings yet
- Simulating Control Systems With Simulink and MATLABDocument5 pagesSimulating Control Systems With Simulink and MATLABsaharNo ratings yet
- Control Engineering LAb 7Document17 pagesControl Engineering LAb 7johnyrock05No ratings yet
- Using Simulink To Perform Open-Loop SimulationsDocument4 pagesUsing Simulink To Perform Open-Loop SimulationsMansour AbdulazizNo ratings yet
- Exp1 dSPACEDocument19 pagesExp1 dSPACEVisheshNo ratings yet
- LCS Lab 2 ZynabDocument14 pagesLCS Lab 2 ZynabZainab AshrafNo ratings yet
- Lab Experiment 1 (B)Document15 pagesLab Experiment 1 (B)Laiba MaryamNo ratings yet
- Air Heater Control SystemDocument25 pagesAir Heater Control SystemDeby Helma Putra H.100% (1)
- Scilab Recipe 3 - Xcos Blocks Seasoning - Scilab NinjaDocument8 pagesScilab Recipe 3 - Xcos Blocks Seasoning - Scilab NinjaWendell Kim LlanetaNo ratings yet
- Control Engineering Lab ManualDocument4 pagesControl Engineering Lab ManualGTNo ratings yet
- FlowCAD An PSpice AutoConvergenceDocument10 pagesFlowCAD An PSpice AutoConvergenceSirish OrugantiNo ratings yet
- Lab 1: Systems Modeling in Simulink Using Differential EquationsDocument23 pagesLab 1: Systems Modeling in Simulink Using Differential EquationsHurrem ArifNo ratings yet
- EEE350 Control Systems: Assignment 2Document15 pagesEEE350 Control Systems: Assignment 2Nur AfiqahNo ratings yet
- ECE 411 Computer Lab 1Document9 pagesECE 411 Computer Lab 1Sekar PrasetyaNo ratings yet
- Caspoc PDFDocument56 pagesCaspoc PDFRahulNo ratings yet
- Introduction To Labview For Control Design and Simulation PDFDocument15 pagesIntroduction To Labview For Control Design and Simulation PDFKunal KhandelwalNo ratings yet
- Introduction To Matlab/Simulink ObjectivesDocument8 pagesIntroduction To Matlab/Simulink ObjectivesFatima SaeedNo ratings yet
- EE 340: Control Systems Lab 4 Manual Introduction To SimulinkDocument13 pagesEE 340: Control Systems Lab 4 Manual Introduction To SimulinkAnsar NiaziNo ratings yet
- Laboratory ManualDocument26 pagesLaboratory ManualahmadNo ratings yet
- OPNET Lab Two - Switches vs. Hubs: EE440 Dr. Jane DongDocument7 pagesOPNET Lab Two - Switches vs. Hubs: EE440 Dr. Jane DongPoonam SinghNo ratings yet
- Lab 8: Programming With B&R Automation Studio: Discrete Time Transfer FunctionsDocument6 pagesLab 8: Programming With B&R Automation Studio: Discrete Time Transfer FunctionsHarold Palma SuarezNo ratings yet
- Simulink HandoutDocument10 pagesSimulink HandoutahmadNo ratings yet
- Lab 5Document8 pagesLab 5maheshasicNo ratings yet
- Lab #2: PI Controller Design and Second Order SystemsDocument4 pagesLab #2: PI Controller Design and Second Order SystemssamielmadssiaNo ratings yet
- To DC sJBJirDocument11 pagesTo DC sJBJirprakashNo ratings yet
- Lab 6Document7 pagesLab 6Koteswara Rao VaddempudiNo ratings yet
- Workshop 2 P-Only Control of Tank LevelDocument5 pagesWorkshop 2 P-Only Control of Tank LevelJoselyn ChewNo ratings yet
- Coco SoftwareDocument22 pagesCoco SoftwareMisael RamírezNo ratings yet
- Lab4 - DC Motor Position Digital Controller Design - 7-11-2018Document22 pagesLab4 - DC Motor Position Digital Controller Design - 7-11-2018Eng. Ibrahim Abdullah AlruhmiNo ratings yet
- Simulink ExxDocument7 pagesSimulink ExxRajrdbNo ratings yet
- Modeling and Digital Simulation Case Studies: 3.1 Pre-Lab AssignmentDocument13 pagesModeling and Digital Simulation Case Studies: 3.1 Pre-Lab AssignmentLittle_skipNo ratings yet
- Experiment 1Document10 pagesExperiment 1mbmonvilleNo ratings yet
- Uppaal 4.0: Small TutorialDocument11 pagesUppaal 4.0: Small TutorialF Sa AbbasiNo ratings yet
- Uppaal 4.0: Small Tutorial: This Description Covers Version 4.0.7Document11 pagesUppaal 4.0: Small Tutorial: This Description Covers Version 4.0.7F Sa AbbasiNo ratings yet
- MATLAB Simulink IntroductionDocument21 pagesMATLAB Simulink Introductionhodeegits9526No ratings yet
- Lab Report Rotary CompleteDocument22 pagesLab Report Rotary CompleteSyed Farid100% (1)
- Home Assignment DC Motor Control1Document7 pagesHome Assignment DC Motor Control1jegjegtNo ratings yet
- ECE 437 Power Electronics: SVPWM Inverter SimulationDocument27 pagesECE 437 Power Electronics: SVPWM Inverter Simulationkhaled99No ratings yet
- Cadence Tutorial 4Document14 pagesCadence Tutorial 4bk249No ratings yet
- 5807 Simulink TutorialDocument31 pages5807 Simulink TutorialSureshNo ratings yet
- Mechatronics - Module1Document13 pagesMechatronics - Module1vasudevananishNo ratings yet
- Xapp 1031Document28 pagesXapp 1031mrithyunjaysivNo ratings yet
- Control System SensitivityDocument13 pagesControl System SensitivitySuvra PattanayakNo ratings yet
- Power Electronics: Control : Home Assignment A1: Speed Control With DC MachineDocument7 pagesPower Electronics: Control : Home Assignment A1: Speed Control With DC MachinebmmostefaNo ratings yet
- Lab 4Document4 pagesLab 4Vu LeNo ratings yet
- Lab 1 - HandoutDocument38 pagesLab 1 - HandoutShivam ChaturvediNo ratings yet
- Uppaal Small TutorialDocument11 pagesUppaal Small TutorialPhoebixNo ratings yet
- Process Analytics Using Promodel: Workstation Simulator™Document11 pagesProcess Analytics Using Promodel: Workstation Simulator™shourav2113No ratings yet
- ET401 Lab Self-Regulating Single Tank Level Control: Modeling and Tuning Profs Sarnacki, Owen, Olivari, Tefft Fall 2019Document4 pagesET401 Lab Self-Regulating Single Tank Level Control: Modeling and Tuning Profs Sarnacki, Owen, Olivari, Tefft Fall 2019essameldinNo ratings yet
- Ee 465 Lab 5Document8 pagesEe 465 Lab 5api-302211966No ratings yet
- Boost Converter Using SimulinkDocument14 pagesBoost Converter Using SimulinkNicola DelmonteNo ratings yet
- 1.4 Using Matlab AND Simulink FOR System Modeling and Simulation in Data CommunicationsDocument6 pages1.4 Using Matlab AND Simulink FOR System Modeling and Simulation in Data CommunicationsAndruska MarioNo ratings yet
- Lab 1 Plt341Document17 pagesLab 1 Plt341derbewNo ratings yet
- Caspoc From Scratch An Engineers Workbook: Simulation and Animation of Power Electronics and Electrical DrivesDocument55 pagesCaspoc From Scratch An Engineers Workbook: Simulation and Animation of Power Electronics and Electrical Drivesyr48No ratings yet
- Synopsis Electrical Distribution Control With Real Time TimersDocument14 pagesSynopsis Electrical Distribution Control With Real Time TimersNishant NagarNo ratings yet
- Introduction to the simulation of power plants for EBSILON®Professional Version 15From EverandIntroduction to the simulation of power plants for EBSILON®Professional Version 15No ratings yet
- Computer-Controlled Systems: Theory and Design, Third EditionFrom EverandComputer-Controlled Systems: Theory and Design, Third EditionRating: 3 out of 5 stars3/5 (4)
- Walter Russell and Lao Russell Atomic SuicideDocument300 pagesWalter Russell and Lao Russell Atomic Suicidesimonaloredana100% (1)
- Cen29305 ch00-fmDocument24 pagesCen29305 ch00-fmhadjer14No ratings yet
- Integrated Microchannel Cooling in A Three Dimensional Integrated Circuit A Ther Mal Man Age MentDocument4 pagesIntegrated Microchannel Cooling in A Three Dimensional Integrated Circuit A Ther Mal Man Age MentNihal GuptaNo ratings yet
- Biology Applied Physics BiochemistryDocument6 pagesBiology Applied Physics BiochemistrychukwukerechimezirimNo ratings yet
- Sypt 03 2021 22Document36 pagesSypt 03 2021 22Raihan MullaNo ratings yet
- 2014 - Design of Supercritical Carbon Dioxide Centrifugal Compressors PDFDocument164 pages2014 - Design of Supercritical Carbon Dioxide Centrifugal Compressors PDFJúlia Matos100% (1)
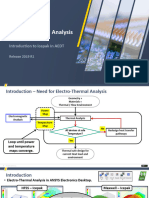
- AEDT Icepak Intro 2019R1 L6 Electro Thermal AnalysisDocument30 pagesAEDT Icepak Intro 2019R1 L6 Electro Thermal AnalysisAbhishek yadavNo ratings yet
- Homework #9Document2 pagesHomework #9Eduardo VCNo ratings yet
- Career Episode 1 DanishDocument7 pagesCareer Episode 1 DanishOmaya TariqNo ratings yet
- Effectiveness of Positive Pressure Ventilation System For Road TunnelDocument8 pagesEffectiveness of Positive Pressure Ventilation System For Road TunnelHarold TaylorNo ratings yet
- Data Sheet Supercal 539 en 09-06-2010Document7 pagesData Sheet Supercal 539 en 09-06-2010Ania SokolnickaNo ratings yet
- Quiz - Heat TransferDocument3 pagesQuiz - Heat Transferbronxtube.ytNo ratings yet
- Esrterfw Instructions 2Document24 pagesEsrterfw Instructions 2f9zvxkvw5mNo ratings yet
- PHYC10004 Examination 2015Document8 pagesPHYC10004 Examination 2015Bussemand12No ratings yet
- Chapter 5 SlidesDocument27 pagesChapter 5 Slidesmardel11No ratings yet
- Packed Amine Absorber Simulation Tracks Plant PerformanceDocument14 pagesPacked Amine Absorber Simulation Tracks Plant Performancematrix69No ratings yet
- 1 s2.0 S0260877421004003 Main DESKTOP LJ83778Document15 pages1 s2.0 S0260877421004003 Main DESKTOP LJ83778عزام صالحNo ratings yet
- of Refrigeration Basic Prinicple and ProblemsDocument39 pagesof Refrigeration Basic Prinicple and ProblemsUday Kiran BokkaNo ratings yet
- Ventilation Calculation For The Transformer Room AssumptionDocument7 pagesVentilation Calculation For The Transformer Room AssumptionsamehNo ratings yet
- Quick Freezing Using Liquid NitrogenDocument5 pagesQuick Freezing Using Liquid NitrogenErickMartinSNo ratings yet
- Conversion Factors With RationaleDocument22 pagesConversion Factors With RationaleUJJWALNo ratings yet
- Heat ExchangerDocument54 pagesHeat Exchangeriremkochan18No ratings yet
- 1 Test Booklet: Mechanical EngineeringDocument48 pages1 Test Booklet: Mechanical EngineeringRa BalamuruganNo ratings yet
- Outdoor Cabinet SeriesDocument9 pagesOutdoor Cabinet SeriesCarlos RázuriNo ratings yet
- Lab QnsDocument2 pagesLab QnsDeepak KumarNo ratings yet
- Chapter II - THERMOCHEMISTRY (Handout)Document6 pagesChapter II - THERMOCHEMISTRY (Handout)anon_40967343No ratings yet
- Physics HeatDocument6 pagesPhysics Heatsiba padhyNo ratings yet
- Alternative Elecctrical Energy Sources GeothermalDocument39 pagesAlternative Elecctrical Energy Sources GeothermalJose Corbacho100% (1)
- Basic Cold Weather Manual - LAAWS Project OfficeDocument203 pagesBasic Cold Weather Manual - LAAWS Project Officejohn deereNo ratings yet
- Physics Chapter 12Document7 pagesPhysics Chapter 12Prashant SahNo ratings yet