You might also like
- Quiz 4Document2 pagesQuiz 4Sebastián LorcaNo ratings yet
- QLSTMvs LSTMDocument7 pagesQLSTMvs LSTMmohamedaligharbi20No ratings yet
- EECS16A: Homework 3: Problem 5: Segway ToursDocument8 pagesEECS16A: Homework 3: Problem 5: Segway ToursShubham JainNo ratings yet
- Appendix A: Extra Tree Model Program CDocument5 pagesAppendix A: Extra Tree Model Program CekeneNo ratings yet
- Font Transfer 2 AutoencodersDocument78 pagesFont Transfer 2 Autoencoderscloud4nrjNo ratings yet
- Ann - Lab - Ipynb - ColaboratoryDocument7 pagesAnn - Lab - Ipynb - Colaboratorysohan kamsaniNo ratings yet
- Python3 FrescoDocument8 pagesPython3 FrescoNaresh ReddyNo ratings yet
- Expo1 SeminarioDocument19 pagesExpo1 SeminarioAlexander VázquezNo ratings yet
- ML Lab....... 3-Converted NewDocument27 pagesML Lab....... 3-Converted NewHanisha BavanaNo ratings yet
- CodeDocument4 pagesCodeThinh HoangNo ratings yet
- Practical 2Document3 pagesPractical 2soham pawarNo ratings yet
- Exe 1Document13 pagesExe 1jaya pandiNo ratings yet
- C 19 AmanAgarwalDocument13 pagesC 19 AmanAgarwalAman BansalNo ratings yet
- Examen - Darwin - Merchan - Ipynb - ColaboratoryDocument5 pagesExamen - Darwin - Merchan - Ipynb - Colaboratoryjerryman1No ratings yet
- Ada Lab Recordd NewDocument26 pagesAda Lab Recordd NewRiyaz ShaikNo ratings yet
- 코드Document9 pages코드DAHLI-EFFECTNo ratings yet
- ReporteDocument9 pagesReporteRenato Sebastian Rodriguez LlanosNo ratings yet
- CNN Numpy 1st HandsonDocument5 pagesCNN Numpy 1st HandsonJohn Solomon100% (1)
- G300S RainbowDocument7 pagesG300S RainbowGeral Prasetyo NugrahaNo ratings yet
- Kerr - Solve IvpDocument8 pagesKerr - Solve Ivpyulieth andrea ramirez romeroNo ratings yet
- Reporte 2Document5 pagesReporte 2Renato Sebastian Rodriguez LlanosNo ratings yet
- Modules 1Document9 pagesModules 1karthiyayani umashankarNo ratings yet
- C 19 AmanAgarwalDocument13 pagesC 19 AmanAgarwalAman BansalNo ratings yet
- Practical SCDocument7 pagesPractical SCAnu stephie NadarNo ratings yet
- Project Car CodeDocument15 pagesProject Car Codesrujan koppunooriNo ratings yet
- Code ExplainDocument4 pagesCode ExplainThinh HoangNo ratings yet
- 1 - Standard Linear Regression: Numpy NP PandasDocument4 pages1 - Standard Linear Regression: Numpy NP PandasWahib NakhoulNo ratings yet
- FATOR2Document2 pagesFATOR2Alvaro LopesNo ratings yet
- CodeDocument11 pagesCodemushahedNo ratings yet
- in This Video We Will Train Our First Model in TensorflowDocument14 pagesin This Video We Will Train Our First Model in TensorflowKubilay İnelNo ratings yet
- All CodesDocument8 pagesAll Codesa7med.3mvrNo ratings yet
- Python 3 Oops Hands OnDocument7 pagesPython 3 Oops Hands OnrajeshNo ratings yet
- AIML Lab ProgDocument15 pagesAIML Lab ProgGreen MongorNo ratings yet
- T3 - QB - Chapter 7 - QB - SolutionDocument46 pagesT3 - QB - Chapter 7 - QB - SolutionPalak RathoreNo ratings yet
- Experiment No: 13 Transient and Steady State Response AnalysisDocument28 pagesExperiment No: 13 Transient and Steady State Response Analysisayesha amjadNo ratings yet
- Python 3 Functions and OOPs FPDocument10 pagesPython 3 Functions and OOPs FPPriya SatheeshNo ratings yet
- RNN - UrbanDocument4 pagesRNN - UrbanjuanNo ratings yet
- TemplateDocument6 pagesTemplateishangoyal2658No ratings yet
- Exp 6Document6 pagesExp 6jayNo ratings yet
- New 2Document6 pagesNew 2pavithraNo ratings yet
- EigenvaluesDocument5 pagesEigenvaluesyashsonone25No ratings yet
- Daftar Lampiran Coding Python RecognizeDocument7 pagesDaftar Lampiran Coding Python RecognizeResha Noviane PutriNo ratings yet
- Regression: 1 Implementación de Métodos de RegresiónDocument11 pagesRegression: 1 Implementación de Métodos de RegresiónÓscar Alfonso Gómez SepúlvedaNo ratings yet
- Prototype 13Document1 pagePrototype 13Yemi TowobolaNo ratings yet
- Exercice5 - ColaboratoryDocument3 pagesExercice5 - ColaboratoryYosr ZaiedNo ratings yet
- Vidya Bhavan College For Engineering Technology, Rautapur, Chaubeypur, KanpurDocument22 pagesVidya Bhavan College For Engineering Technology, Rautapur, Chaubeypur, KanpurPrafful VermaNo ratings yet
- MachineDocument45 pagesMachineGagan Sharma100% (1)
- CVDL Exp4 CodeDocument22 pagesCVDL Exp4 CodepramodNo ratings yet
- Python Final Lab 2019Document35 pagesPython Final Lab 2019vanithaNo ratings yet
- ANN PR Code and OutputDocument25 pagesANN PR Code and Outputas9900276No ratings yet
- Object Oriented Problem Exercise Using PythonDocument1 pageObject Oriented Problem Exercise Using PythonSubhasish BagchiNo ratings yet
- AI Lab Assignment#02Document10 pagesAI Lab Assignment#02Babar AliNo ratings yet
- ML ProjectDocument10 pagesML ProjectVaishnavi B VNo ratings yet
- ''' Function To Load Dataset ''': Open List Range Len FloatDocument3 pages''' Function To Load Dataset ''': Open List Range Len FloatcndNo ratings yet
- Mandlebrot Set With PygameDocument7 pagesMandlebrot Set With PygameHenry DennisNo ratings yet
- Speech Signal Processing ASSIGNMENT - 3 Date - 10.02.2018Document21 pagesSpeech Signal Processing ASSIGNMENT - 3 Date - 10.02.2018Er Rudrasen PalNo ratings yet
- Perfectly Balanced Chapter 2 Anand Oza Anandoza Source CodeDocument10 pagesPerfectly Balanced Chapter 2 Anand Oza Anandoza Source CodeDjNo ratings yet
- Important Algorithms MAKAUT (Former WBUT)Document43 pagesImportant Algorithms MAKAUT (Former WBUT)srjmukherjee2No ratings yet
- Noron ThiDocument26 pagesNoron ThiĐức ThánhNo ratings yet
- Aalto EE Profile Toolbox 03 2011Document4 pagesAalto EE Profile Toolbox 03 2011Aalto University Executive EducationNo ratings yet
- Pipeline Integrity ReviewDocument16 pagesPipeline Integrity ReviewRicardo Andres Santamaria Torres100% (2)
- Compresor Centrifugo ZH+ (English)Document16 pagesCompresor Centrifugo ZH+ (English)Eduardo LedezmaNo ratings yet
- Vertical Turbine Pump InformationDocument10 pagesVertical Turbine Pump Informationraghu_mn100% (1)
- Challenger 300 FactsheetDocument2 pagesChallenger 300 FactsheetLavern P. SipinNo ratings yet
- Lecture-14 Stall and Pitch ControlDocument6 pagesLecture-14 Stall and Pitch ControljameelahmadNo ratings yet
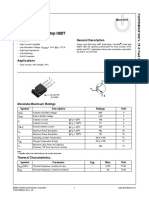
- 150A, S-D, 600v, FGH75N60UF, 452w, 225ADocument9 pages150A, S-D, 600v, FGH75N60UF, 452w, 225AManuel SierraNo ratings yet
- Formula.1.Technical - Analysis.2004 05Document18 pagesFormula.1.Technical - Analysis.2004 05infowindNo ratings yet
- SQL LoaderDocument16 pagesSQL LoaderNagendra BabuNo ratings yet
- WSPS Kit ListingDocument2 pagesWSPS Kit Listingwilson100% (1)
- Claim Example Anwar HafeezDocument5 pagesClaim Example Anwar HafeezabobeedoNo ratings yet
- Transaction Processing SystemsDocument18 pagesTransaction Processing Systemsapi-26617115No ratings yet
- VOE79A9920159HDocument657 pagesVOE79A9920159HNeuza Freitas80% (5)
- Reverse Innovation A Global Growth Strategy That Could Pre-Empt Disruption at HomeDocument9 pagesReverse Innovation A Global Growth Strategy That Could Pre-Empt Disruption at HomePitaloka RanNo ratings yet
- Wood #135 - ENGDocument63 pagesWood #135 - ENGLaura Bukonte100% (5)
- School Library Management SystemDocument52 pagesSchool Library Management SystemBiplab AcharjeeNo ratings yet
- SprinkCAD FlyerDocument2 pagesSprinkCAD FlyerGerardo ClementeNo ratings yet
- Unity University: Architecture and Urban PlanningDocument10 pagesUnity University: Architecture and Urban Planningabrham getachewNo ratings yet
- Series 38 Super Durable 20091125 173441Document8 pagesSeries 38 Super Durable 20091125 173441K-fioNo ratings yet
- Wine Country Community Plan - Outstanding Issues: Boundary Modification Request: Group B (Mr. Chaudhuri)Document250 pagesWine Country Community Plan - Outstanding Issues: Boundary Modification Request: Group B (Mr. Chaudhuri)rivcoclerkoftheboardNo ratings yet
- Finisher-U1 Circuit Diagram PDFDocument16 pagesFinisher-U1 Circuit Diagram PDFVicent JesusNo ratings yet
- Han, Levenspiel - 1988 - Extended Monod Kinetics For Substrate, Product, and Cell Inhibition-AnnotatedDocument8 pagesHan, Levenspiel - 1988 - Extended Monod Kinetics For Substrate, Product, and Cell Inhibition-AnnotatedMarisol Muñoz PonceNo ratings yet
- Double Surface TreatmentDocument9 pagesDouble Surface TreatmentAdrian FrantescuNo ratings yet
- American Connector Company-Case Study: Submitted To Prof. Anshuman TripathyDocument4 pagesAmerican Connector Company-Case Study: Submitted To Prof. Anshuman TripathyRavi Theja ManchuriNo ratings yet
- Failure Mode and Effect AnalysisDocument9 pagesFailure Mode and Effect AnalysisameliaNo ratings yet
- Customer MasterDocument19 pagesCustomer MasterNaveen Kumar ReddyNo ratings yet
- QHSEP 08 Chanage ManagementDocument4 pagesQHSEP 08 Chanage ManagementKhalid El MasryNo ratings yet
- APQP Format NationalDocument53 pagesAPQP Format NationalqualityNo ratings yet
- A001-MNC Siemens ChillerDocument24 pagesA001-MNC Siemens ChillerLuis Yama0% (1)