You might also like
- Self-Tuning Controller For Servo Motor With An Adaptive Disturbance ObserverDocument5 pagesSelf-Tuning Controller For Servo Motor With An Adaptive Disturbance ObserverrezadigitNo ratings yet
- Design of PID CONTROLLERDocument6 pagesDesign of PID CONTROLLERRAJ KUMAR SHIHINo ratings yet
- Matlab and Simulink For Modeling and Control DC MotorDocument14 pagesMatlab and Simulink For Modeling and Control DC MotorGhaleb AlzubairiNo ratings yet
- ELE 4623: Control Systems: PD Compensator Design and EvaluationDocument16 pagesELE 4623: Control Systems: PD Compensator Design and EvaluationMaitha SaeedNo ratings yet
- Name/Signature: EE496B - Controls Lab - Fall 2021Document2 pagesName/Signature: EE496B - Controls Lab - Fall 2021kasun prabhathNo ratings yet
- Servo FundamentalsDocument11 pagesServo Fundamentalsapi-3797895No ratings yet
- Disturbance Observer Based Current Controller For A Brushed DC MotorDocument6 pagesDisturbance Observer Based Current Controller For A Brushed DC MotorAji Brahma NugrohoNo ratings yet
- Speed Control of Separately Excited D.C. Motor: Chayan Kumar, Prof. (DR.) Deoraj Kumar TantiDocument11 pagesSpeed Control of Separately Excited D.C. Motor: Chayan Kumar, Prof. (DR.) Deoraj Kumar TantiWieNo ratings yet
- 1 SMDocument7 pages1 SMaswardi8756No ratings yet
- 8.1. Lab ObjectiveDocument6 pages8.1. Lab ObjectiveJang-Suh Justin LeeNo ratings yet
- Disturbance Rejection Analysis of A Disturbance Observer Based Velocity ControllerDocument6 pagesDisturbance Rejection Analysis of A Disturbance Observer Based Velocity ControllerJayakrishnan P SNo ratings yet
- Sliding Mode Brushless DC Motor Current Torque Control AlgorithmsDocument6 pagesSliding Mode Brushless DC Motor Current Torque Control Algorithmscarolain_msNo ratings yet
- An Introduction To Proportional-Integral-Derivative (PID) ControllersDocument47 pagesAn Introduction To Proportional-Integral-Derivative (PID) ControllersAmar BeheraNo ratings yet
- Control and Steering Feel Issues in The Design of An Electric Power Steering SystemDocument5 pagesControl and Steering Feel Issues in The Design of An Electric Power Steering SystembbeeNo ratings yet
- Experimental Identification of An Armature Controlled DC MotorDocument3 pagesExperimental Identification of An Armature Controlled DC MotorJESUS DAVID FRANCO GOMEZNo ratings yet
- NEWLab1 Servo2 v5 LabManualDocument9 pagesNEWLab1 Servo2 v5 LabManualkrups1991No ratings yet
- Real - Time DC Motor Position Control by (FPID) Controllers and Design (FLC) Using Labview Software SimulationDocument10 pagesReal - Time DC Motor Position Control by (FPID) Controllers and Design (FLC) Using Labview Software SimulationmadanesherNo ratings yet
- A Comparative Analysis of Pi, Fuzzy Logic and Anfis SpeedDocument13 pagesA Comparative Analysis of Pi, Fuzzy Logic and Anfis SpeedKein Huat ChuaNo ratings yet
- Modelling, Feedback Control Design and Simulation of An Industrial ApplicationDocument21 pagesModelling, Feedback Control Design and Simulation of An Industrial ApplicationjttatsumiNo ratings yet
- Internal ModelDocument15 pagesInternal ModelDiego RamirezNo ratings yet
- Fuzzy Logic Control of Synchronous Generator Under The Condition of Transient Three Phase Short CircuitDocument5 pagesFuzzy Logic Control of Synchronous Generator Under The Condition of Transient Three Phase Short CircuitwilliamNo ratings yet
- Lecture I - Introduction To PID Control SystemDocument47 pagesLecture I - Introduction To PID Control SystemR.W. SaputraNo ratings yet
- The Speed Control of PMSMDocument5 pagesThe Speed Control of PMSMMehmet KırgözoğluNo ratings yet
- BEE3143 Assignment S1200910Document7 pagesBEE3143 Assignment S1200910Farhan Juice0% (2)
- Op Amp Pid Paper MATEC FORMATDocument3 pagesOp Amp Pid Paper MATEC FORMAT류홍제No ratings yet
- A Simple and Robust Speed Control Scheme of Permanent Magnet Synchronous MotorDocument4 pagesA Simple and Robust Speed Control Scheme of Permanent Magnet Synchronous Motoresh223No ratings yet
- IISTE Journals Publication Nearest EditiDocument8 pagesIISTE Journals Publication Nearest EditiNguyễn Hải ĐăngNo ratings yet
- ME311 Autumn2020 EndSem FinalVersionDocument4 pagesME311 Autumn2020 EndSem FinalVersionVarun PathakNo ratings yet
- DCS 01 (Dcspeed)Document16 pagesDCS 01 (Dcspeed)K PranavNo ratings yet
- Ziegler-Nichols Tuning Method: Understanding The PID ControllerDocument13 pagesZiegler-Nichols Tuning Method: Understanding The PID ControllerSaran SelvanNo ratings yet
- Design Problem Matlab Project TFDocument19 pagesDesign Problem Matlab Project TFhumayun azizNo ratings yet
- Mca 01 00066Document7 pagesMca 01 00066djkeags24No ratings yet
- Me2009 - Control System Technology Lab Assignment 4: Hochiminh City University of Technology Mechatronics DepartmentDocument10 pagesMe2009 - Control System Technology Lab Assignment 4: Hochiminh City University of Technology Mechatronics DepartmentNguyễn Hồng MỹNo ratings yet
- Servo FundamentalsDocument12 pagesServo FundamentalsMohanraj SelvakumarNo ratings yet
- Jpe 8-4-8Document9 pagesJpe 8-4-8Hieu LENo ratings yet
- Optimal and Pid Controller For Controlling CameraDocument10 pagesOptimal and Pid Controller For Controlling CameraaliramezanidehajNo ratings yet
- dSPACE Implementation of Fuzzy Logic Based Vector Control of Induction MotorDocument6 pagesdSPACE Implementation of Fuzzy Logic Based Vector Control of Induction MotorAshwani RanaNo ratings yet
- Delft: Matlab and Simulink For Modeling and ControlDocument12 pagesDelft: Matlab and Simulink For Modeling and Controlawan_krNo ratings yet
- A Study On Adaptive Load Torque Observer For Robust Precision Position Control of MotorDocument6 pagesA Study On Adaptive Load Torque Observer For Robust Precision Position Control of MotorwaweeNo ratings yet
- Control System NotesDocument199 pagesControl System NotesCarson R. Dick100% (2)
- Embedded Application of Fractional Order Control: R. Duma, P. Dobra and M. TruscaDocument2 pagesEmbedded Application of Fractional Order Control: R. Duma, P. Dobra and M. TruscaMiguel D. Diaz H.No ratings yet
- Modeling and Control For DC Motor Using MatlabDocument15 pagesModeling and Control For DC Motor Using MatlabelneelNo ratings yet
- Using An Appropriate Software Package Express The Following Algebraic Fraction As Partial FractionsDocument5 pagesUsing An Appropriate Software Package Express The Following Algebraic Fraction As Partial FractionsAnuruddha WijerathneNo ratings yet
- Adaptive Variable Structure Rotor Flux Observer For An Induction MotorDocument6 pagesAdaptive Variable Structure Rotor Flux Observer For An Induction Motorapi-3826450No ratings yet
- AEE 68 1 2019 - Art - 8Document14 pagesAEE 68 1 2019 - Art - 8Ali ErNo ratings yet
- Control de RetrocesoDocument6 pagesControl de RetrocesoFrank Dusk K DuskNo ratings yet
- 2-DOF Helicopter Controlling by Pole-PlacementsDocument5 pages2-DOF Helicopter Controlling by Pole-PlacementsosdacavNo ratings yet
- Automatic Voltage Regulator and Fuzzy Logic Power System StabilizerDocument6 pagesAutomatic Voltage Regulator and Fuzzy Logic Power System Stabilizerayou_smartNo ratings yet
- DCMotor Parameter Identification Using Speed Step Responses PDFDocument6 pagesDCMotor Parameter Identification Using Speed Step Responses PDFGabi BrasoNo ratings yet
- PID Tuning Using Extremum SeekingDocument10 pagesPID Tuning Using Extremum Seekinggautam28461No ratings yet
- Constrained Predictive Control of A Servo-Driven Tracking TurretDocument6 pagesConstrained Predictive Control of A Servo-Driven Tracking TurretVu Duc TruongNo ratings yet
- Tutorial 7Document2 pagesTutorial 7Gaurav ANo ratings yet
- Mixed-Objective / Control For An Electric Power Assist Steering Using LMI OptimizationDocument2 pagesMixed-Objective / Control For An Electric Power Assist Steering Using LMI OptimizationIsmail HussainNo ratings yet
- DC Motor PD Control To SpecificationDocument8 pagesDC Motor PD Control To Specificationayma.tahrNo ratings yet
- Control of DC Motor Using Different Control StrategiesFrom EverandControl of DC Motor Using Different Control StrategiesNo ratings yet
- Advanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkFrom EverandAdvanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkNo ratings yet
- Handbook of Power Systems Engineering with Power Electronics ApplicationsFrom EverandHandbook of Power Systems Engineering with Power Electronics ApplicationsNo ratings yet
- Simulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorFrom EverandSimulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorNo ratings yet
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetNo ratings yet
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetRating: 2 out of 5 stars2/5 (1)
- 66 in Impactfactor Scientometrics 2012Document16 pages66 in Impactfactor Scientometrics 2012iftitah khayatiNo ratings yet
- Assemlal MedIA09Document17 pagesAssemlal MedIA09dora guzmanNo ratings yet
- Data Hiding in A Kind of PDF Texts For Secret Communication: Shangping Zhong, Xueqi Cheng, Tierui ChenDocument10 pagesData Hiding in A Kind of PDF Texts For Secret Communication: Shangping Zhong, Xueqi Cheng, Tierui Chendora guzmanNo ratings yet
- Weic-Dmkd10 OverlappingcommunityDocument16 pagesWeic-Dmkd10 Overlappingcommunitydora guzmanNo ratings yet
- ChangesDocument8 pagesChangesdora guzmanNo ratings yet
- A Table Detection Method For Multipage PDF DocumenDocument6 pagesA Table Detection Method For Multipage PDF Documendora guzmanNo ratings yet
- A Table Detection Method For Multipage PDF DocumenDocument6 pagesA Table Detection Method For Multipage PDF Documendora guzmanNo ratings yet
- Maintaining The Region of The Americas Free of Polio: Best Practices For Incident Management Support TeamsDocument7 pagesMaintaining The Region of The Americas Free of Polio: Best Practices For Incident Management Support Teamsdora guzmanNo ratings yet
- Simplified PDFDocument17 pagesSimplified PDFdora guzmanNo ratings yet
- Automation of Fast NLODocument36 pagesAutomation of Fast NLOdora guzmanNo ratings yet
- A PDF Method For Multidimensional Modeling of HCCI Engine Combustion: Effects of Turbulence/Chemistry Interactions On Ignition Timing and EmissionsDocument6 pagesA PDF Method For Multidimensional Modeling of HCCI Engine Combustion: Effects of Turbulence/Chemistry Interactions On Ignition Timing and Emissionsdora guzmanNo ratings yet
- JP-Minier E-Peirano PhReports2001Document215 pagesJP-Minier E-Peirano PhReports2001Otuli MunloNo ratings yet
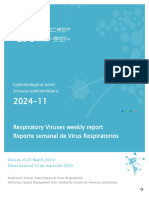
- Influ Rep 22 Mar 2024Document68 pagesInflu Rep 22 Mar 2024dora guzmanNo ratings yet
- Winter 2015Document10 pagesWinter 2015dora guzmanNo ratings yet
- Kahane 2017Document20 pagesKahane 2017dora guzmanNo ratings yet
- PIIS096098221000326XDocument9 pagesPIIS096098221000326Xdora guzmanNo ratings yet
- Kahane 2017Document20 pagesKahane 2017dora guzmanNo ratings yet
- Gladstone 2019Document12 pagesGladstone 2019dora guzmanNo ratings yet
- Thanik 2011Document9 pagesThanik 2011dora guzmanNo ratings yet
- Graessler 2012Document9 pagesGraessler 2012dora guzmanNo ratings yet
- Additive Manufacturing of PLA HNT Nanocomposites For Bi - 2019 - Procedia ManufaDocument8 pagesAdditive Manufacturing of PLA HNT Nanocomposites For Bi - 2019 - Procedia ManufaTin NguyenNo ratings yet
- Jhep07 (2013) 167Document28 pagesJhep07 (2013) 167dora guzmanNo ratings yet
- Ocurrencia de Contaminantes Emergentes en Cuerpos de Agua Superficiales de Una Zona Costera.Document7 pagesOcurrencia de Contaminantes Emergentes en Cuerpos de Agua Superficiales de Una Zona Costera.dora guzmanNo ratings yet
- JFQAWarand PeaceDocument17 pagesJFQAWarand Peacedora guzmanNo ratings yet
- Aparición Estacional de N-Nitrosaminas y Su Asociación ConDocument11 pagesAparición Estacional de N-Nitrosaminas y Su Asociación Condora guzmanNo ratings yet
- Chapter 1-Introduction: Online Shopping (Sometimes Known As E-Tail From "Electronic Retail" or E-Shopping) Is A FormDocument32 pagesChapter 1-Introduction: Online Shopping (Sometimes Known As E-Tail From "Electronic Retail" or E-Shopping) Is A FormdevilsharmaNo ratings yet
- Gad Microproject (02,14,18) SYCM2 - GAD MicroprojectDocument31 pagesGad Microproject (02,14,18) SYCM2 - GAD MicroprojectAtharva BhosaleNo ratings yet
- How To Organize Your Work Home and Life2 PDFDocument73 pagesHow To Organize Your Work Home and Life2 PDFAnonymous Dr2nIMW9wNo ratings yet
- ED256 TMA Second 2020 2021Document8 pagesED256 TMA Second 2020 2021H MNo ratings yet
- Oxineo EN - 0113 01 0605 SDocument1 pageOxineo EN - 0113 01 0605 SJesús ChirinosNo ratings yet
- STAT 3008 Applied Regression Analysis Tutorial 1 - Term 2, 2019 20Document2 pagesSTAT 3008 Applied Regression Analysis Tutorial 1 - Term 2, 2019 20MingyanNo ratings yet
- Iridesse Cleaning Procedure Required DailyDocument5 pagesIridesse Cleaning Procedure Required DailyBrent RothlanderNo ratings yet
- DIALux Module InformationDocument51 pagesDIALux Module Informationraja kumarNo ratings yet
- IEEE STD ANSI-IEEE STD 816-1987Document30 pagesIEEE STD ANSI-IEEE STD 816-1987abdou samiNo ratings yet
- Self-Dehydrating Breather Type SDBDocument39 pagesSelf-Dehydrating Breather Type SDBKHALID98No ratings yet
- Using Digital and Ai To Meet The Energy Sectors Net Zero ChallengeDocument5 pagesUsing Digital and Ai To Meet The Energy Sectors Net Zero ChallengeLuciana BritoNo ratings yet
- Bharatiya Vidya Bhavan (Dept. of Film, TV & Animation Studies)Document5 pagesBharatiya Vidya Bhavan (Dept. of Film, TV & Animation Studies)AshmanNo ratings yet
- Wing Load Calculation: (Example Document For LSA Applicants - v1 of 08.03.16)Document16 pagesWing Load Calculation: (Example Document For LSA Applicants - v1 of 08.03.16)Leonardo VasconcelosNo ratings yet
- IJAEMAPAPERDOCDocument12 pagesIJAEMAPAPERDOCGopikaNo ratings yet
- Operating System (17CS64)Document3 pagesOperating System (17CS64)Pranove ABNo ratings yet
- Score User: Master Blazemeter Performance Testing Brayan ArangoDocument20 pagesScore User: Master Blazemeter Performance Testing Brayan ArangoManuela Garcia monsalveNo ratings yet
- Mobile Application Market PDFDocument4 pagesMobile Application Market PDFAmos MakhubeleNo ratings yet
- Lucas TVS Price List 12-10-2015Document109 pagesLucas TVS Price List 12-10-2015Pragg Aggarwal100% (4)
- A. Levitin "Introduction To The Design & Analysis of Algorithms," 3rd EdDocument70 pagesA. Levitin "Introduction To The Design & Analysis of Algorithms," 3rd EdAmro AbosaifNo ratings yet
- Part A: ListeningDocument7 pagesPart A: ListeningTrần HuyềnNo ratings yet
- SSP 370 Crafter Electrical SystemDocument84 pagesSSP 370 Crafter Electrical SystemJavier GarciaNo ratings yet
- Week 4 (Educational Technology) Answer KeyDocument4 pagesWeek 4 (Educational Technology) Answer KeyChristian PadillaNo ratings yet
- Computer-3 1st QuarterDocument5 pagesComputer-3 1st QuarterEdmar John SajoNo ratings yet
- DS5300Document4 pagesDS5300kishore kumarNo ratings yet
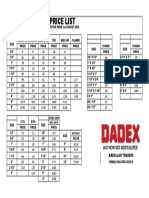
- Dadex Efast Price List 1ST August 2020Document1 pageDadex Efast Price List 1ST August 2020Jugno ShahNo ratings yet
- New Laptop Open Box List 6 DecDocument68 pagesNew Laptop Open Box List 6 DecMamata ChoudhariNo ratings yet
- Test Plan and DocumentsDocument4 pagesTest Plan and DocumentsvimudhiNo ratings yet
- 1001 Solved Electrical Engineering ProblemsDocument798 pages1001 Solved Electrical Engineering ProblemsHero Cordova de Guzman95% (20)
- Determining Cause of Fuel Dilution of EnginesDocument6 pagesDetermining Cause of Fuel Dilution of EnginespedriscoNo ratings yet
- PHD Thesis On Robotics Matlab CodeDocument7 pagesPHD Thesis On Robotics Matlab Codeprdezlief100% (2)