You might also like
- Studies On Electrical Stresses in Rotating Rectifiers For Brushless ExciterDocument6 pagesStudies On Electrical Stresses in Rotating Rectifiers For Brushless ExciterHuong ThaoNo ratings yet
- Development of A Simple Instantaneous Torque Measurement System On A Rotating ShaftDocument7 pagesDevelopment of A Simple Instantaneous Torque Measurement System On A Rotating ShaftschlenNo ratings yet
- Measurement: Nenad Markovic, Slobodan Bjelic, Filip Markovic, Marko Markovic, Srdjan JovicDocument9 pagesMeasurement: Nenad Markovic, Slobodan Bjelic, Filip Markovic, Marko Markovic, Srdjan JovicHarshitha AspariNo ratings yet
- Adaptive Feature Extraction and SVMDocument8 pagesAdaptive Feature Extraction and SVMHumberto MerizaldeNo ratings yet
- Adaptive Torque Pulsation Compensation For A High-Torque DC Brushless Permanent Magnet MotorDocument6 pagesAdaptive Torque Pulsation Compensation For A High-Torque DC Brushless Permanent Magnet Motorfong jeffNo ratings yet
- Torsional Vibration Analysis of Reciprocating Compressor Trains Driven B...Document11 pagesTorsional Vibration Analysis of Reciprocating Compressor Trains Driven B...fuzhi2016No ratings yet
- Modelling, Simulation of Permanent Magnet Synchronous Machine Drive Using FOC TechniqueDocument9 pagesModelling, Simulation of Permanent Magnet Synchronous Machine Drive Using FOC TechniqueahmedNo ratings yet
- A Review of Automatic Grid SynchronizatiDocument8 pagesA Review of Automatic Grid Synchronizaticharushila patelNo ratings yet
- CHARI - MINNICH - ... - Load Characteristics of Synchronous Generators by The Finite-Element Method - ARTICLEDocument13 pagesCHARI - MINNICH - ... - Load Characteristics of Synchronous Generators by The Finite-Element Method - ARTICLEAlen PavlicaNo ratings yet
- Performance Characteristics Brushless DC Drives: Abstruct-A Simulation Model For The Performance Prediction ofDocument6 pagesPerformance Characteristics Brushless DC Drives: Abstruct-A Simulation Model For The Performance Prediction ofhanxinNo ratings yet
- VSDS Motor Design For Compressor Trains To Avoid InterharmonicsDocument14 pagesVSDS Motor Design For Compressor Trains To Avoid InterharmonicsiJordanScribdNo ratings yet
- Effect of Generator Parameters Inaccuracy On Transient Stability PerformanceDocument5 pagesEffect of Generator Parameters Inaccuracy On Transient Stability PerformancesumathyNo ratings yet
- 12pulse Lci Synchronous Drive For A 20 MW Compressor Modeling SiDocument7 pages12pulse Lci Synchronous Drive For A 20 MW Compressor Modeling Sijeevan sankarNo ratings yet
- Electromagnetic Effects On The Torsional Natural Frequencies of An Induction Motor Driving A Reciprocating CompressorDocument22 pagesElectromagnetic Effects On The Torsional Natural Frequencies of An Induction Motor Driving A Reciprocating CompressorRadu BabauNo ratings yet
- Bous Sak 2005Document11 pagesBous Sak 2005Adriano NavarroNo ratings yet
- Dunlop, Verification of Synchronous Machine Modeling in Stability Studies, 1979Document10 pagesDunlop, Verification of Synchronous Machine Modeling in Stability Studies, 1979Easy Energy SACNo ratings yet
- 1994 - Ohnishi - Estimation, Identification, and SensorlessDocument13 pages1994 - Ohnishi - Estimation, Identification, and SensorlessJLuis LuNaNo ratings yet
- Building Electric Motors For Space, With Redundancy and High ReliabilityDocument6 pagesBuilding Electric Motors For Space, With Redundancy and High Reliabilitydiego peinadoNo ratings yet
- Back-EMF Sensorless Control Algorithm For High Dynamics Performances PMSMDocument9 pagesBack-EMF Sensorless Control Algorithm For High Dynamics Performances PMSMSaranji GuruNo ratings yet
- Electric Propulsion System Characterization Through ExperimentsDocument9 pagesElectric Propulsion System Characterization Through Experiments呂文祺No ratings yet
- Backlash Detection in CNC Machines Based On Experimental Vibration AnalysisDocument7 pagesBacklash Detection in CNC Machines Based On Experimental Vibration AnalysisDiana Alejandra Bermudez FajardoNo ratings yet
- Online Cage Rotor Fault DetectionDocument6 pagesOnline Cage Rotor Fault DetectionPedro OdorizziNo ratings yet
- Modelling and Simulation of Armature-Controlled Direct Current Motor Using MATLABDocument7 pagesModelling and Simulation of Armature-Controlled Direct Current Motor Using MATLABRaj Bihari SinghNo ratings yet
- Simulation of Static Frequency Converter For Synchronous Machine Operation and Investigation of Shaft VoltageDocument6 pagesSimulation of Static Frequency Converter For Synchronous Machine Operation and Investigation of Shaft VoltageraghavremNo ratings yet
- Evaluation of Progressive Deterioration of A Squirrel-Cage Rotor, With A Condition Monitoring System That Implements The Sideband MethodologyDocument6 pagesEvaluation of Progressive Deterioration of A Squirrel-Cage Rotor, With A Condition Monitoring System That Implements The Sideband MethodologyLeo ArguijoNo ratings yet
- Standard Approach To Perform Power System Stability Studies in Oil and Gas PlantsDocument13 pagesStandard Approach To Perform Power System Stability Studies in Oil and Gas PlantsShailesh ChettyNo ratings yet
- Turboqtneratortbased Overview of Mathematical Generator ModelingDocument1 pageTurboqtneratortbased Overview of Mathematical Generator ModelingGino Román CisnerosNo ratings yet
- An044259264 PDFDocument6 pagesAn044259264 PDFmazenNo ratings yet
- Thermal Analysis of Induction and Synchronous Reluctance MotorsDocument6 pagesThermal Analysis of Induction and Synchronous Reluctance MotorsShraddha kaleNo ratings yet
- Steady State Analysis of Synch To No UsDocument4 pagesSteady State Analysis of Synch To No UsJara FeyisaNo ratings yet
- Emergency Generator Sizing and Motor StartingDocument6 pagesEmergency Generator Sizing and Motor Startingsaga2000cnNo ratings yet
- End Winding Vibration Hydro GeneratorDocument5 pagesEnd Winding Vibration Hydro Generatorpatel chandramaniNo ratings yet
- Journal Jpe 14-5 293292634Document10 pagesJournal Jpe 14-5 293292634Roberto DiasNo ratings yet
- Silo - Tips - Generators Provide PowerDocument12 pagesSilo - Tips - Generators Provide PowerPervimNo ratings yet
- Condition Monitoring of El Machines Through Signal ProcessingDocument5 pagesCondition Monitoring of El Machines Through Signal ProcessingSafjrocnNo ratings yet
- Evaluation of Stator Winding Faults Severity in Inverter-Fed InductionmotorsDocument12 pagesEvaluation of Stator Winding Faults Severity in Inverter-Fed Inductionmotorsgoncalves.wellington.renanNo ratings yet
- Model-Based Fault Diagnosis in Electric Drives Using Machine LearningDocument14 pagesModel-Based Fault Diagnosis in Electric Drives Using Machine LearningYassir Ait lahcenNo ratings yet
- Quantum Translate CrytpoDocument10 pagesQuantum Translate CrytpokgvnktshNo ratings yet
- Emergency Generator Sizing and Motor Starting Analysis PDFDocument6 pagesEmergency Generator Sizing and Motor Starting Analysis PDFBhavik PrajapatiNo ratings yet
- Analysis of Permanent Magnet Synchronous MotorDocument15 pagesAnalysis of Permanent Magnet Synchronous Motormalini72No ratings yet
- TD13 enDocument12 pagesTD13 enkiyong namNo ratings yet
- Simulation For A 3 Phase Induction Motor Under Unbalanced ConditionsDocument4 pagesSimulation For A 3 Phase Induction Motor Under Unbalanced ConditionsRadu BabauNo ratings yet
- Abstracts / JSAE Review 18 (1997) 185-209Document1 pageAbstracts / JSAE Review 18 (1997) 185-209Dhawadi MahdiNo ratings yet
- Experimental Fault-Tolerant Control of A PMSM DriveDocument8 pagesExperimental Fault-Tolerant Control of A PMSM DriveahmedNo ratings yet
- Reference Pulse Circular Interpolators For CMC SystemsDocument6 pagesReference Pulse Circular Interpolators For CMC SystemsguptaamitalwNo ratings yet
- Kessel 1998Document11 pagesKessel 1998yosiNo ratings yet
- A Real-Time Predictive Maintenance System For Machine SystemsDocument8 pagesA Real-Time Predictive Maintenance System For Machine SystemsGabrielWalersonNo ratings yet
- Electric Power Systems ResearchDocument9 pagesElectric Power Systems ResearchJose CastroNo ratings yet
- Mitigation of Fatigue Damage and Vibration Severity of Electric Drivetrains by Systematic Selection of Motion ProfilesDocument10 pagesMitigation of Fatigue Damage and Vibration Severity of Electric Drivetrains by Systematic Selection of Motion ProfilesashishNo ratings yet
- DR Suliman Finalll Paper11 1Document6 pagesDR Suliman Finalll Paper11 1Githma LakshanNo ratings yet
- Analysis of A Three-Phase Induction Machine Including Time and Space Harmonic Effects The A B C Reference FrameDocument6 pagesAnalysis of A Three-Phase Induction Machine Including Time and Space Harmonic Effects The A B C Reference FramesouravghimireyNo ratings yet
- Clamp-Force Estimation For A Brake-by-Wire System: A Sensor-Fusion ApproachDocument10 pagesClamp-Force Estimation For A Brake-by-Wire System: A Sensor-Fusion ApproachHsan HaddarNo ratings yet
- Model-Based Fault Diagnosis in Electric Drives Using Machine LearningDocument14 pagesModel-Based Fault Diagnosis in Electric Drives Using Machine LearningNisha KamarajNo ratings yet
- Ieee 1Document5 pagesIeee 1JOYDEEP BHUNIANo ratings yet
- Design and Implementation of An Extended Kalman Filter For The State Estimation of A Permanent Magnet Synchronous MotorDocument7 pagesDesign and Implementation of An Extended Kalman Filter For The State Estimation of A Permanent Magnet Synchronous Motor22dr0302No ratings yet
- Experimental Investigation of Dynamics Effects On Multiple-Injection Common Rail System PerformanceDocument13 pagesExperimental Investigation of Dynamics Effects On Multiple-Injection Common Rail System PerformancemoaedNo ratings yet
- NASA EMAfreq RespDocument6 pagesNASA EMAfreq RespFabián AcevedoNo ratings yet
- Excitation Control of A Turbo-Generator by Using Artificial Neural NetworksDocument13 pagesExcitation Control of A Turbo-Generator by Using Artificial Neural Networksapi-19799369No ratings yet
- Automotive Electronic Diagnostics (Course 2)From EverandAutomotive Electronic Diagnostics (Course 2)Rating: 4 out of 5 stars4/5 (2)
- By James Corley: Supervisor, Rotating Equipment Arabian American Oil Company Dhahran, Saudi ArabiaDocument8 pagesBy James Corley: Supervisor, Rotating Equipment Arabian American Oil Company Dhahran, Saudi ArabiaramsebNo ratings yet
- The Operating Characteristics of G Ear-Type Couplings by Gerhardt Pahl Professor and Engineer Darmstadt Technical University Darmstadt, West GermanyDocument8 pagesThe Operating Characteristics of G Ear-Type Couplings by Gerhardt Pahl Professor and Engineer Darmstadt Technical University Darmstadt, West GermanyramsebNo ratings yet
- Turbomachinery Problems Lube and Seal System Revisited by Royce N. BrownDocument6 pagesTurbomachinery Problems Lube and Seal System Revisited by Royce N. BrownramsebNo ratings yet
- T5pg63 70Document8 pagesT5pg63 70ramsebNo ratings yet
- T5pg31 44Document14 pagesT5pg31 44ramsebNo ratings yet
- T5pg7 14Document8 pagesT5pg7 14ramsebNo ratings yet
- T5pg1 6Document6 pagesT5pg1 6ramsebNo ratings yet
- Rotating Machinery VibrationDocument1 pageRotating Machinery VibrationramsebNo ratings yet
- An Automatic Method of Direct Interpretation of Re PDFDocument15 pagesAn Automatic Method of Direct Interpretation of Re PDFIrwansyah RamadhaniNo ratings yet
- BTDDocument20 pagesBTDYeditha Satyanarayana MurthyNo ratings yet
- The First Law of Thermodynamics - 040170170000Document50 pagesThe First Law of Thermodynamics - 040170170000xixoNo ratings yet
- Universidad Nacional de Ingeniería: Sistemas de Control I (EE-647O)Document2 pagesUniversidad Nacional de Ingeniería: Sistemas de Control I (EE-647O)Jhonathan C LNo ratings yet
- Nurture Jee (M+a) Physics (2023 24)Document6 pagesNurture Jee (M+a) Physics (2023 24)manishkharedocsNo ratings yet
- Ce569 ch6 7 8Document57 pagesCe569 ch6 7 8Anonymous ep7LE5ZdP5No ratings yet
- Spectrometry FinalDocument57 pagesSpectrometry FinalAastha SahuNo ratings yet
- 10EES 03 Origin of The UniverseDocument18 pages10EES 03 Origin of The UniverseMaan PatelNo ratings yet
- B1, Timber Beam Analysis & Design (AS1720)Document3 pagesB1, Timber Beam Analysis & Design (AS1720)Saiful IslamNo ratings yet
- Torsion of Rolled Sections in Building StructuresDocument27 pagesTorsion of Rolled Sections in Building StructuresrilopiyNo ratings yet
- BEE Lecture1Document59 pagesBEE Lecture1Jeff HardyNo ratings yet
- Design & Development of Helmholtz Coil For Hyperpolarized MRIDocument6 pagesDesign & Development of Helmholtz Coil For Hyperpolarized MRIJosué Daniel Meneses DíazNo ratings yet
- Prashant Time Sheet May 2021Document1 pagePrashant Time Sheet May 2021Ujala ShahNo ratings yet
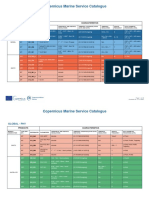
- Catalogue CmemsDocument40 pagesCatalogue CmemsAgung PratamaNo ratings yet
- New FARGO GH-280AL Series Aluminum Stirrup Clamps: Advancing The State-of-the-Art in Stirrup DesignDocument4 pagesNew FARGO GH-280AL Series Aluminum Stirrup Clamps: Advancing The State-of-the-Art in Stirrup DesignhendrexNo ratings yet
- Press ToolsDocument6 pagesPress ToolsSamir BoseNo ratings yet
- Scope: TIP Category: Data and CalculationsDocument11 pagesScope: TIP Category: Data and CalculationsTomas SalingerNo ratings yet
- Accelerated MotionDocument205 pagesAccelerated MotionphysicspalanichamyNo ratings yet
- Mathematics 7 3 Quarter: Learning Area Grade Level Quarter DateDocument4 pagesMathematics 7 3 Quarter: Learning Area Grade Level Quarter Datealdrin sabinoNo ratings yet
- 09-10 Reversible Processes and Open System Energy BalanceDocument42 pages09-10 Reversible Processes and Open System Energy BalanceNomun BatunNo ratings yet
- DAV CAE CLASS XI Syllabus 2021-2022Document30 pagesDAV CAE CLASS XI Syllabus 2021-2022Prabhat Kumar MishraNo ratings yet
- Samle Log Sheet (98f0001)Document6 pagesSamle Log Sheet (98f0001)Ajin SNo ratings yet
- Solutions of Tutorial4Document30 pagesSolutions of Tutorial4Aditay RanaNo ratings yet
- QuestionsDocument6 pagesQuestionsjethro ganeloNo ratings yet
- Development of Small Injection Moulding Machine For Forming Small Plastic Articles For Small-Scale IndustriesDocument14 pagesDevelopment of Small Injection Moulding Machine For Forming Small Plastic Articles For Small-Scale IndustriesHenry PutraNo ratings yet
- Cheryl reyes-ACTIVITYDocument4 pagesCheryl reyes-ACTIVITYCheryl ReyesNo ratings yet
- Mousetrap Car Lab ReportDocument5 pagesMousetrap Car Lab ReportHarrisonWuJouChan50% (4)
- Case Studies of Some Concrete Structural FailuresDocument96 pagesCase Studies of Some Concrete Structural FailuresBandilung TzNo ratings yet
- Sci ReviewerDocument18 pagesSci Reviewerd0092750No ratings yet
- 020102g - Supplier PrequalificationDocument9 pages020102g - Supplier PrequalificationHannaFouadNo ratings yet