You might also like
- NeTracker 1000 11246Document4 pagesNeTracker 1000 11246a.kz1970No ratings yet
- Practical Data Acquisition for Instrumentation and Control SystemsFrom EverandPractical Data Acquisition for Instrumentation and Control SystemsNo ratings yet
- 4.3 BleDocument35 pages4.3 BleCathyFer Valles YanezNo ratings yet
- Simulators For Sensor Networks: Sagnik Bhattacharya 9/12/2001Document37 pagesSimulators For Sensor Networks: Sagnik Bhattacharya 9/12/2001Vũ Tiến ViệtNo ratings yet
- Introduction To Wireless Sensor NetworksDocument33 pagesIntroduction To Wireless Sensor Networkspadmavathy2kNo ratings yet
- cc2650 PDFDocument63 pagescc2650 PDFtarik marrakechNo ratings yet
- Cc2650 Simplelink™ Multistandard Wireless Mcu: 1 Device OverviewDocument59 pagesCc2650 Simplelink™ Multistandard Wireless Mcu: 1 Device OverviewMikkelsNo ratings yet
- B-L475E-Iot01A: Discovery Kit For Iot Node, Multi-Channel Communication With Stm32L4Document5 pagesB-L475E-Iot01A: Discovery Kit For Iot Node, Multi-Channel Communication With Stm32L4Slim ABDELHEDINo ratings yet
- Opt 8241Document35 pagesOpt 8241aNo ratings yet
- Cc2640 Simplelink™ Bluetooth Wireless Mcu: 1.1 FeaturesDocument64 pagesCc2640 Simplelink™ Bluetooth Wireless Mcu: 1.1 FeaturesErikNo ratings yet
- Cc2640R2L Simplelink™ 5.1 Low Energy Wireless Mcu: BluetoothDocument54 pagesCc2640R2L Simplelink™ 5.1 Low Energy Wireless Mcu: BluetoothasokanenNo ratings yet
- Bluetooth MeshDocument22 pagesBluetooth MeshjkorentayerNo ratings yet
- DDF300 - Accessing GPIO, I2C, and UART DevicesDocument52 pagesDDF300 - Accessing GPIO, I2C, and UART DevicesN DvNo ratings yet
- Control and Monitoring Unit COM605: Product GuideDocument16 pagesControl and Monitoring Unit COM605: Product GuideMark Anthony PacananNo ratings yet
- 4 IOM - Introduction To System Installation, v6.0, 030106Document38 pages4 IOM - Introduction To System Installation, v6.0, 030106jangoNo ratings yet
- A Seminar Report On: The Zigbee Technology BYDocument26 pagesA Seminar Report On: The Zigbee Technology BYckarvindNo ratings yet
- RN4020 2Document28 pagesRN4020 2Braulio Isaac Hernandez CruzNo ratings yet
- Streaming Realtime Data From and To BCI2000 - FieldTrip ToolboxDocument2 pagesStreaming Realtime Data From and To BCI2000 - FieldTrip ToolboxGeneration GenerationNo ratings yet
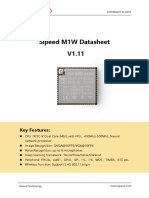
- Sipeed M1W Datasheet V1.11Document9 pagesSipeed M1W Datasheet V1.11Rangel FlavioNo ratings yet
- Umg 20 CMDocument24 pagesUmg 20 CMxuyen tranNo ratings yet
- Avr Basics For Engg StudentsDocument50 pagesAvr Basics For Engg StudentsAjit PandeNo ratings yet
- PATIENT - BILLING - SOFTWARE1-rk ProjectDocument152 pagesPATIENT - BILLING - SOFTWARE1-rk ProjectParul TanejaNo ratings yet
- TEMS Investigation 19.2 Release Note 2Document29 pagesTEMS Investigation 19.2 Release Note 2Jamel SiagianNo ratings yet
- Collecting IoT Data in InfluxDBDocument48 pagesCollecting IoT Data in InfluxDBwilliawoNo ratings yet
- Collecting IoT Data in InfluxDB PDFDocument48 pagesCollecting IoT Data in InfluxDB PDFwilliawoNo ratings yet
- UNIT Code: BIT 2116 UNIT NAME: Network Design and ManagementDocument13 pagesUNIT Code: BIT 2116 UNIT NAME: Network Design and ManagementJohn KihiuNo ratings yet
- Ipconvlite: Universal Communication GatewayDocument2 pagesIpconvlite: Universal Communication GatewayJosé TrigoNo ratings yet
- Ir Esources Anager: EnvistaDocument4 pagesIr Esources Anager: EnvistaЧингизNo ratings yet
- CC 1352 PDocument61 pagesCC 1352 PGiampaolo CiardielloNo ratings yet
- Chapter 12 - AVR Microcontrollers-Features, Architecture Assembly LanguageDocument131 pagesChapter 12 - AVR Microcontrollers-Features, Architecture Assembly LanguageErgin Özdikicioğlu100% (1)
- Esp32 s3 Wroom 2 - Datasheet - enDocument29 pagesEsp32 s3 Wroom 2 - Datasheet - enP100 Abdallah Ibrahem abdallah mohammedNo ratings yet
- nRF9160 PS v1.2Document404 pagesnRF9160 PS v1.2gobind raiNo ratings yet
- Lecture 05 ARM ProcessorsDocument65 pagesLecture 05 ARM ProcessorsNguyễn Tấn ĐịnhNo ratings yet
- PDF cc2640r2f TIDocument64 pagesPDF cc2640r2f TImahjoubi RabieNo ratings yet
- CC 2640 R 2 FDocument64 pagesCC 2640 R 2 FSaud AhmedNo ratings yet
- IoT Week1 Day2 LectureDocument26 pagesIoT Week1 Day2 LectureHasan A.T.M.No ratings yet
- 802.15.4 ZigbeeDocument33 pages802.15.4 ZigbeeAshutosh Gupta0% (1)
- Iec 101 104Document22 pagesIec 101 104abdul nazeer100% (1)
- Discovery Kit For Iot Node, Multi-Channel Communication With Stm32L4+ SeriesDocument6 pagesDiscovery Kit For Iot Node, Multi-Channel Communication With Stm32L4+ SeriesPANKAJ KRISHNANTREYNo ratings yet
- BOLA Proposal - Electricity BoardDocument8 pagesBOLA Proposal - Electricity Boardpradip2906No ratings yet
- Networked Wireless Meter ReadingDocument20 pagesNetworked Wireless Meter ReadingChinchu SasiNo ratings yet
- Datasheet Etna2 Accelerograph KinemetricsDocument2 pagesDatasheet Etna2 Accelerograph KinemetricsJefferson Lazon ZamoraNo ratings yet
- B8 SchedulesDocument8 pagesB8 SchedulesRamesh-NairNo ratings yet
- Embedded SystemsDocument57 pagesEmbedded SystemsSyed ZNo ratings yet
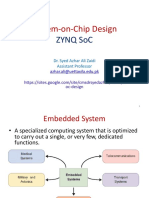
- System-on-Chip Design: Zynq SocDocument17 pagesSystem-on-Chip Design: Zynq SocBilal Haider TanoliNo ratings yet
- NTHLR Introduction & OverviewDocument47 pagesNTHLR Introduction & OverviewFaiyaz AlamNo ratings yet
- CY8C63x7 - BLE SoCDocument108 pagesCY8C63x7 - BLE SoCropay61705No ratings yet
- BBC Micro:bit v2: Please See For Latest UpdatesDocument10 pagesBBC Micro:bit v2: Please See For Latest UpdatesscosminNo ratings yet
- Ch3. ConnectivityDocument70 pagesCh3. ConnectivityMohan RajNo ratings yet
- Esp32 c6 Mini 1 - Mini 1u - Datasheet - enDocument41 pagesEsp32 c6 Mini 1 - Mini 1u - Datasheet - endanythe007No ratings yet
- Pptonsixmonthtraining 180427093146Document24 pagesPptonsixmonthtraining 180427093146Diwakar DiwakarNo ratings yet
- Freescale Kinetis M Customer 2014-03Document17 pagesFreescale Kinetis M Customer 2014-03Andres Baena ZuluagaNo ratings yet
- MICA2 DatasheetDocument2 pagesMICA2 DatasheetFares MezragNo ratings yet
- RTS Slids Lec4Document21 pagesRTS Slids Lec4stephen562001No ratings yet
- Esp32 c3 Mini 1 Datasheet enDocument32 pagesEsp32 c3 Mini 1 Datasheet enCamilo SànchezNo ratings yet
- 03 NuTool IntroductionDocument14 pages03 NuTool IntroductionDharmendra SavaliyaNo ratings yet
- Noise and Vibration Testing Electronics: General DescriptionDocument4 pagesNoise and Vibration Testing Electronics: General DescriptionlaloNo ratings yet
- l1 - Introduction - v22Document40 pagesl1 - Introduction - v22Pham Xuan ThuyNo ratings yet
- Arduino and Nano33 Ble SenseDocument31 pagesArduino and Nano33 Ble Sensepc100xohmNo ratings yet
- Paul John Steeve BDocument6 pagesPaul John Steeve BRexson TagubaNo ratings yet
- Coax Square OuterDocument4 pagesCoax Square OuterflegiasNo ratings yet
- List of Indian Medical Devices ExportersDocument42 pagesList of Indian Medical Devices ExportersWellexy Pharma Healthcare Private LimitedNo ratings yet
- Rcm&E 202201Document100 pagesRcm&E 202201Martijn HinfelaarNo ratings yet
- ItemDocument6 pagesItemIsmail OsmanNo ratings yet
- An X-Bar Theoretic AccountDocument14 pagesAn X-Bar Theoretic AccountSamuel Ekpo100% (1)
- 4112-4127 Color Scan KitDocument3 pages4112-4127 Color Scan KitxcopytechNo ratings yet
- Lesson Four: Vocabulary: Vocabulary WordsDocument2 pagesLesson Four: Vocabulary: Vocabulary WordsKristine BocciaNo ratings yet
- MGT 406 - Chapter 1Document18 pagesMGT 406 - Chapter 1Bilal AfzalNo ratings yet
- KAC-8452 KAC-8402: Instruction Manual Mode D'Emploi Manual de InstruccionesDocument20 pagesKAC-8452 KAC-8402: Instruction Manual Mode D'Emploi Manual de InstruccionesEDUARDONo ratings yet
- Sınıf İngilizce Soru Testi - OGM Materyal1Document3 pagesSınıf İngilizce Soru Testi - OGM Materyal1denizNo ratings yet
- UCS617Document1 pageUCS617Lets clear Jee mathsNo ratings yet
- TDA9860 Philips Elenota - PL PDFDocument18 pagesTDA9860 Philips Elenota - PL PDFDamianNo ratings yet
- Manual Masina de Spalat BekoDocument92 pagesManual Masina de Spalat BekoConfortini MassimoNo ratings yet
- The Meaning of The Hermit Major Arcana Tarot Card in ReadingsDocument8 pagesThe Meaning of The Hermit Major Arcana Tarot Card in ReadingsKugan SanmugamNo ratings yet
- Manual Biamp Amplifier Nov 16Document18 pagesManual Biamp Amplifier Nov 16Rachmat Guntur Dwi PutraNo ratings yet
- Sample Qualitative Thesis Chapter 1 5 Final Copy EditedDocument162 pagesSample Qualitative Thesis Chapter 1 5 Final Copy EditedRizza NaviaNo ratings yet
- Boston University Dissertation GuidelinesDocument5 pagesBoston University Dissertation GuidelinesBuyCustomPaperCanada100% (1)
- Proper System Charging and 22Document1 pageProper System Charging and 22mdecowskiNo ratings yet
- Brand Legacy - Cutler - Hammer AW V6 HR 23 10 12Document2 pagesBrand Legacy - Cutler - Hammer AW V6 HR 23 10 12Henry RodriguezNo ratings yet
- Data Sheet 1250kw Cat 3512 PrimeDocument6 pagesData Sheet 1250kw Cat 3512 Primevictoros27No ratings yet
- Ecology Interactions Unit Assessment Homework For Educators - Download at Www. Science PowerpointDocument10 pagesEcology Interactions Unit Assessment Homework For Educators - Download at Www. Science PowerpointRyan MurphyNo ratings yet
- Class X Science PaperDocument4 pagesClass X Science PaperJitendra Karn RajputNo ratings yet
- Fourth Sem IT Dept PDFDocument337 pagesFourth Sem IT Dept PDFSangeeta PalNo ratings yet
- Introduction To Human Anatomy and Physiology 4th Edition Solomon Test BankDocument25 pagesIntroduction To Human Anatomy and Physiology 4th Edition Solomon Test BankHeatherFisherpwjts100% (44)
- Gujarat Technological UniversityDocument2 pagesGujarat Technological UniversityStavan TrivediNo ratings yet
- Recycling and Repurposing Video Assessment RubricDocument1 pageRecycling and Repurposing Video Assessment Rubricapi-235526012No ratings yet
- Name of Pupil: - Gr. & SectionDocument3 pagesName of Pupil: - Gr. & SectionRaymund Bonde100% (1)
- Saavedra 2004Document15 pagesSaavedra 2004Christopher Emanuel Pulido RamosNo ratings yet
- Benz 968590164562 20171230224054Document5 pagesBenz 968590164562 20171230224054عمار ميسينيNo ratings yet