You might also like
- T314-06 Application Structures - RevCDocument26 pagesT314-06 Application Structures - RevCRio YuwandiNo ratings yet
- Oracle Quick Guides: Part 4 - Oracle Administration: Security and PrivilegeFrom EverandOracle Quick Guides: Part 4 - Oracle Administration: Security and PrivilegeNo ratings yet
- T568-02 Freelance System Architecture - RevCDocument42 pagesT568-02 Freelance System Architecture - RevCnana suryanaNo ratings yet
- PLC Programming & Implementation: An Introduction to PLC Programming Methods and ApplicationsFrom EverandPLC Programming & Implementation: An Introduction to PLC Programming Methods and ApplicationsNo ratings yet
- Student Management Project Report Tkinter MysqlDocument47 pagesStudent Management Project Report Tkinter Mysqllokesh KoppanathiNo ratings yet
- Digital Control Engineering: Analysis and DesignFrom EverandDigital Control Engineering: Analysis and DesignRating: 3 out of 5 stars3/5 (1)
- Medical Shop C#Document88 pagesMedical Shop C#AyushNo ratings yet
- INTRODUCTION: Techno Task Manager Is Where The Task Management Mainly ConcernsDocument88 pagesINTRODUCTION: Techno Task Manager Is Where The Task Management Mainly ConcernsLàsÿà ChowdàrÿNo ratings yet
- T314-13 Control Modules - RevCDocument25 pagesT314-13 Control Modules - RevCRio YuwandiNo ratings yet
- Oracle Adapter R3 Implementation GuideDocument80 pagesOracle Adapter R3 Implementation GuideFJAutosysuserNo ratings yet
- Student Management-Project Report Tkinter MysqlDocument46 pagesStudent Management-Project Report Tkinter Mysqlaarti paul85% (13)
- TMS320F2812 Dsp/biosDocument26 pagesTMS320F2812 Dsp/biosPantech ProLabs India Pvt LtdNo ratings yet
- IPMS Ready Reckoner 6-1Document18 pagesIPMS Ready Reckoner 6-1Digambar JangamNo ratings yet
- Logix5000 Controllers Commom ProceduresDocument575 pagesLogix5000 Controllers Commom ProceduresJuan Camilo Delgado AguirreNo ratings yet
- Software Requirement and Design Specification (SRDS)Document7 pagesSoftware Requirement and Design Specification (SRDS)Shahid AbbasNo ratings yet
- Assignment TaVanPhuc D03K13Document18 pagesAssignment TaVanPhuc D03K13Phúc HarryNo ratings yet
- Software Design Description For: COMSATS University Islamabad, Sahiwal Campus - PakistanDocument8 pagesSoftware Design Description For: COMSATS University Islamabad, Sahiwal Campus - PakistanMaham MalikNo ratings yet
- SRS IubDocument10 pagesSRS IubMuhammad Hamza SahiNo ratings yet
- 2ecs 6023CS1Document16 pages2ecs 6023CS1Tahir ImtiazNo ratings yet
- T314-04 Engineering Workplace - RevCDocument24 pagesT314-04 Engineering Workplace - RevCRio YuwandiNo ratings yet
- Maximizing RTAC PerformanceDocument20 pagesMaximizing RTAC PerformanceArnold F. Cinches100% (1)
- Time Table ManagementDocument42 pagesTime Table ManagementSatya Prasad Moharana82% (28)
- How To FunctionalDocument21 pagesHow To Functionalgalici2002No ratings yet
- Design TemplateDocument6 pagesDesign TemplateSempati SanoNo ratings yet
- 04 Preliminary Design Document PDFDocument5 pages04 Preliminary Design Document PDFSakali AliNo ratings yet
- Software Requirements Specification and Design: VersionDocument6 pagesSoftware Requirements Specification and Design: VersionMustafa RadaidehNo ratings yet
- Software Requirement Specification-TemplateDocument10 pagesSoftware Requirement Specification-TemplateAbdullah ShahidNo ratings yet
- White Paper Deltav Control Module Execution en 56282Document6 pagesWhite Paper Deltav Control Module Execution en 56282samim_khNo ratings yet
- T314-09 Variables and Data Types - RevCDocument20 pagesT314-09 Variables and Data Types - RevCRio YuwandiNo ratings yet
- Experiment 1: Aim: Prepare A SRS Document in Line With IEEE Recommended Standards ofDocument32 pagesExperiment 1: Aim: Prepare A SRS Document in Line With IEEE Recommended Standards ofNishant MishraNo ratings yet
- Weka Software ManualaDocument20 pagesWeka Software ManualaAswin Kumar ThanikachalamNo ratings yet
- 1756-Controllogix Common Procedures Programming GuideDocument575 pages1756-Controllogix Common Procedures Programming GuideThanh BaronNo ratings yet
- Mobile App User Guide TemplateDocument9 pagesMobile App User Guide TemplateChrisrephot Delos ReyesNo ratings yet
- Tutorial 01 PLC Basics1 PDFDocument21 pagesTutorial 01 PLC Basics1 PDFTete GoriNo ratings yet
- Software Requirement and Design Specification (SRDS)Document7 pagesSoftware Requirement and Design Specification (SRDS)Sardar RaziullahNo ratings yet
- DAQMaster User V3-7-2103US 210329 WDocument249 pagesDAQMaster User V3-7-2103US 210329 WadiNo ratings yet
- Structuring With Controllers and Modules: Week 1 Unit 3Document5 pagesStructuring With Controllers and Modules: Week 1 Unit 3Atilio Josue Alvarez CariasNo ratings yet
- MCSL 217Document15 pagesMCSL 217blue36107No ratings yet
- Ans of Interview QuestionsDocument7 pagesAns of Interview QuestionsPavan Kumar ReddyNo ratings yet
- SRSDocument13 pagesSRSKrunal ZalavadiyaNo ratings yet
- 8086Document60 pages8086Early TimesNo ratings yet
- Problem Solving SkillDocument7 pagesProblem Solving Skillrayemraisa2007No ratings yet
- Inside Document Um Work FlowDocument66 pagesInside Document Um Work FlowRavi BadoniNo ratings yet
- Software Design Description For: COMSATS University Islamabad, Park Road, Chak Shahzad, Islamabad PakistanDocument7 pagesSoftware Design Description For: COMSATS University Islamabad, Park Road, Chak Shahzad, Islamabad PakistanmanajaNo ratings yet
- SEN 1 To 10Document41 pagesSEN 1 To 10Vaibhav MandhareNo ratings yet
- Computer Lab MaintenanceDocument44 pagesComputer Lab Maintenancey_69363495670% (10)
- Computer Programming 1Document26 pagesComputer Programming 1lorenzch100% (2)
- Program Slicing: SPL-1 Project Report, 2019Document12 pagesProgram Slicing: SPL-1 Project Report, 2019Md. Mehedi HasanNo ratings yet
- Software Requirement Specifications: Submitted To: Mrs. Kakoli Banerjee Mrs. Rosy ChauhanDocument22 pagesSoftware Requirement Specifications: Submitted To: Mrs. Kakoli Banerjee Mrs. Rosy ChauhanArchit GargNo ratings yet
- Development Security Guide Oracle FLEXCUBE Payments Release 12.3.0.0.0 (December) (2016)Document19 pagesDevelopment Security Guide Oracle FLEXCUBE Payments Release 12.3.0.0.0 (December) (2016)MulualemNo ratings yet
- Chapter-7 Designed Methodologies and Tools: Design Flow: Sequence of Steps in A Design MethodologyDocument16 pagesChapter-7 Designed Methodologies and Tools: Design Flow: Sequence of Steps in A Design MethodologyElias YeshanawNo ratings yet
- Unit-4 SW Designing and CodingDocument32 pagesUnit-4 SW Designing and CodingReal FactsNo ratings yet
- NV PRODocument844 pagesNV PROSergio GarcíaNo ratings yet
- Alpha Marquee Control: Activex Developer'S ReferenceDocument25 pagesAlpha Marquee Control: Activex Developer'S ReferencemazzaraNo ratings yet
- TM801TRE.30-ENG - APROL Engineering BasicsDocument40 pagesTM801TRE.30-ENG - APROL Engineering BasicsAnton KazakovNo ratings yet
- Lab 4Document24 pagesLab 4nguyen minh giangNo ratings yet
- Comp Application 1 SampleDocument21 pagesComp Application 1 Samplelolmingani saipanyuNo ratings yet
- (Project) Requirements SpecificationDocument8 pages(Project) Requirements SpecificationAbhijeet KumarNo ratings yet
- Srstemplate IeeeseDocument8 pagesSrstemplate IeeeseTenebris BNo ratings yet
- 06.2 Function Block DiagramDocument18 pages06.2 Function Block Diagramธรรมรักษ์ โทนาอรรถNo ratings yet
- T314-09 Variables and Data Types - RevCDocument20 pagesT314-09 Variables and Data Types - RevCRio YuwandiNo ratings yet
- T314-07 AC800M Hardware - RevCDocument40 pagesT314-07 AC800M Hardware - RevCRio YuwandiNo ratings yet
- T314-05 OPC Connectivity - RevCDocument16 pagesT314-05 OPC Connectivity - RevCRio YuwandiNo ratings yet
- T314-08 Libraries - RevCDocument24 pagesT314-08 Libraries - RevCRio YuwandiNo ratings yet
- T314-04 Engineering Workplace - RevCDocument24 pagesT314-04 Engineering Workplace - RevCRio YuwandiNo ratings yet
- T314-03 Operation - RevCDocument32 pagesT314-03 Operation - RevCRio YuwandiNo ratings yet
- T314-01 References - RevCDocument4 pagesT314-01 References - RevCRio YuwandiNo ratings yet
- T315-02 System Architecture - RevCDocument20 pagesT315-02 System Architecture - RevCNikhilesh MuraleedharanNo ratings yet
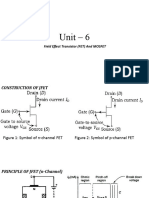
- 14 EDC Syed Irfan AliDocument9 pages14 EDC Syed Irfan AliRio YuwandiNo ratings yet
- T314-01 Course Description - RevCDocument2 pagesT314-01 Course Description - RevCRio YuwandiNo ratings yet
- What Are SemiconductorsDocument12 pagesWhat Are SemiconductorsRio YuwandiNo ratings yet
- Bailey DCS Simulator API: PreviseDocument33 pagesBailey DCS Simulator API: PreviseRio YuwandiNo ratings yet
- DO8P Datasheet PDFDocument10 pagesDO8P Datasheet PDFRio YuwandiNo ratings yet
- DO8P Datasheet PDFDocument10 pagesDO8P Datasheet PDFRio YuwandiNo ratings yet
- Network Interface Slave Module (INNIS01) / Network Processing Module (INNPM11)Document61 pagesNetwork Interface Slave Module (INNIS01) / Network Processing Module (INNPM11)Rio YuwandiNo ratings yet
- 5 Valmet Valimaki 18112015Document12 pages5 Valmet Valimaki 18112015Rio YuwandiNo ratings yet
- Capital Structure and Leverage: Multiple Choice: ConceptualDocument53 pagesCapital Structure and Leverage: Multiple Choice: ConceptualArya StarkNo ratings yet
- Demand Determinants EEMDocument22 pagesDemand Determinants EEMPrabha KaranNo ratings yet
- Your Bentley Bentayga V8: PresentingDocument9 pagesYour Bentley Bentayga V8: PresentingThomas SeiferthNo ratings yet
- Malampaya Case StudyDocument15 pagesMalampaya Case StudyMark Kenneth ValerioNo ratings yet
- Plant Vs Filter by Diana WalstadDocument6 pagesPlant Vs Filter by Diana WalstadaachuNo ratings yet
- Name: Mercado, Kath DATE: 01/15 Score: Activity Answer The Following Items On A Separate Sheet of Paper. Show Your Computations. (4 Items X 5 Points)Document2 pagesName: Mercado, Kath DATE: 01/15 Score: Activity Answer The Following Items On A Separate Sheet of Paper. Show Your Computations. (4 Items X 5 Points)Kathleen MercadoNo ratings yet
- NSTP SlabDocument2 pagesNSTP SlabCherine Fates MangulabnanNo ratings yet
- Elementary Electronics 1968-09-10Document108 pagesElementary Electronics 1968-09-10Jim ToewsNo ratings yet
- Mang-May-Tinh - 03a.-Dns1 - (Cuuduongthancong - Com)Document52 pagesMang-May-Tinh - 03a.-Dns1 - (Cuuduongthancong - Com)Anh Quân TrầnNo ratings yet
- Enhancing Guest Experience and Operational Efficiency in Hotels Through Robotic Technology-A Comprehensive Review.Document8 pagesEnhancing Guest Experience and Operational Efficiency in Hotels Through Robotic Technology-A Comprehensive Review.Chandigarh PhilosophersNo ratings yet
- Sinamics g120 BrochureDocument16 pagesSinamics g120 BrochuremihacraciunNo ratings yet
- Letter of Acceptfor TDocument3 pagesLetter of Acceptfor TCCSNo ratings yet
- Korea Times - Korean-EnglishDocument313 pagesKorea Times - Korean-EnglishgyeryongNo ratings yet
- Facultybooklet2011-2012final - 006 (Unlocked by WWW - Freemypdf.com)Document199 pagesFacultybooklet2011-2012final - 006 (Unlocked by WWW - Freemypdf.com)kalam19892209No ratings yet
- Gifted Black Females Attending Predominantly White Schools Compressed 1 CompressedDocument488 pagesGifted Black Females Attending Predominantly White Schools Compressed 1 Compressedapi-718408484No ratings yet
- DescriptiveDocument1 pageDescriptiveRizqa Anisa FadhilahNo ratings yet
- @InglizEnglish-4000 Essential English Words 6 UzbDocument193 pages@InglizEnglish-4000 Essential English Words 6 UzbMaster SmartNo ratings yet
- Anabolic Steroid-Dynamics, Kinetics, Mechanisms, Adverse Effects and AbuseDocument6 pagesAnabolic Steroid-Dynamics, Kinetics, Mechanisms, Adverse Effects and AbuseArvin DiNozzoNo ratings yet
- Wall Panel SystemsDocument57 pagesWall Panel SystemsChrisel DyNo ratings yet
- Wire Rope TesterDocument4 pagesWire Rope TesterclzagaNo ratings yet
- Computer in Community Pharmacy by Adnan Sarwar ChaudharyDocument10 pagesComputer in Community Pharmacy by Adnan Sarwar ChaudharyDr-Adnan Sarwar Chaudhary100% (1)
- Story 1Document3 pagesStory 1api-296631749No ratings yet
- Adigrat University: College of Engineering and Technology Department of Chemical EnginneringDocument39 pagesAdigrat University: College of Engineering and Technology Department of Chemical EnginneringSeid Aragaw100% (1)
- Forex 1 PDFDocument3 pagesForex 1 PDFChandreshNo ratings yet
- Teaching Plan - Math 8 Week 1-8 PDFDocument8 pagesTeaching Plan - Math 8 Week 1-8 PDFRYAN C. ENRIQUEZNo ratings yet
- Shades Eq Gloss Large Shade ChartDocument2 pagesShades Eq Gloss Large Shade ChartmeganNo ratings yet
- STRUNK V THE STATE OF CALIFORNIA Etal. NYND 16-cv-1496 (BKS / DJS) OSC WITH TRO Filed 12-15-2016 For 3 Judge Court Electoral College ChallengeDocument1,683 pagesSTRUNK V THE STATE OF CALIFORNIA Etal. NYND 16-cv-1496 (BKS / DJS) OSC WITH TRO Filed 12-15-2016 For 3 Judge Court Electoral College ChallengeChristopher Earl Strunk100% (1)
- O Repensar Da Fonoaudiologia Na Epistemologia CienDocument5 pagesO Repensar Da Fonoaudiologia Na Epistemologia CienClaudilla L.No ratings yet
- POLYTHEOREMSDocument32 pagesPOLYTHEOREMSYen LeeNo ratings yet
- Advanced Statistical Approaches To Quality: INSE 6220 - Week 4Document44 pagesAdvanced Statistical Approaches To Quality: INSE 6220 - Week 4picalaNo ratings yet