You might also like
- CISCO PACKET TRACER LABS: Best practice of configuring or troubleshooting NetworkFrom EverandCISCO PACKET TRACER LABS: Best practice of configuring or troubleshooting NetworkNo ratings yet
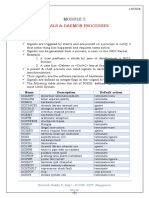
- Signals and Daemon Processes: UNIX ProgrammingDocument17 pagesSignals and Daemon Processes: UNIX ProgrammingVarun GowdaNo ratings yet
- Signals and Daemon Processes UnixDocument30 pagesSignals and Daemon Processes UnixRahul SinhaNo ratings yet
- Unix Module 5Document30 pagesUnix Module 5study materialNo ratings yet
- UNIX Programming - Module 5 SlidesDocument81 pagesUNIX Programming - Module 5 SlidesLa QuicaNo ratings yet
- Unix Programming - Module 5Document12 pagesUnix Programming - Module 5Anusha SNo ratings yet
- Signals, Daemon, IPCHKBKuspnotes Unit6 8 160505161037Document90 pagesSignals, Daemon, IPCHKBKuspnotes Unit6 8 160505161037Varad GalgaliNo ratings yet
- Unit 5 Signals: SIG Sigabrt Abort Sigalrm AlarmDocument8 pagesUnit 5 Signals: SIG Sigabrt Abort Sigalrm AlarmVamsinath JavangulaNo ratings yet
- Signals: Chapter 8 of Robbins BookDocument41 pagesSignals: Chapter 8 of Robbins BookelemaniaqNo ratings yet
- Linux SignalsDocument3 pagesLinux SignalsavadcsNo ratings yet
- 5 Signal ProcessingDocument40 pages5 Signal Processinggayathri nathNo ratings yet
- Linux System Programming Part 5 - Interprocess Communication (IPC)Document21 pagesLinux System Programming Part 5 - Interprocess Communication (IPC)Калоян ТотевNo ratings yet
- Signal Handling in Linux: Tushar B. KuteDocument27 pagesSignal Handling in Linux: Tushar B. Kuteutkarsh130896No ratings yet
- Signal Names and PurposeDocument3 pagesSignal Names and PurposerealxsaloNo ratings yet
- Network Programming Notes - SignalsDocument6 pagesNetwork Programming Notes - Signalstaleysha vuyanziNo ratings yet
- Lab04 SignalsDocument8 pagesLab04 SignalsRavinder K SinglaNo ratings yet
- Sleep WakeDocument7 pagesSleep WakejaiNo ratings yet
- Unix System ProgammingDocument13 pagesUnix System ProgammingShivanand ManjaragiNo ratings yet
- Cheatsheet Signal A4Document1 pageCheatsheet Signal A4Buland Kumar SinghNo ratings yet
- Signals ManDocument12 pagesSignals ManMiki PerezNo ratings yet
- UNIX SignalsDocument89 pagesUNIX SignalsSantu PaulNo ratings yet
- OS Linux Signals OCT 17Document24 pagesOS Linux Signals OCT 17vivekNo ratings yet
- All About Linux SignalsDocument17 pagesAll About Linux SignalsSK_shivamNo ratings yet
- Unit4 Signals Session 2Document21 pagesUnit4 Signals Session 2Amrin MulaniNo ratings yet
- Crash N' Burn: Writing Linux Application Fault HandlersDocument25 pagesCrash N' Burn: Writing Linux Application Fault HandlersTuxology.net100% (4)
- Chapter05 TCP Client Server ExampleDocument54 pagesChapter05 TCP Client Server ExampleSarma JonnabhattarNo ratings yet
- Linux SignalsDocument22 pagesLinux SignalsNaveen YanamaddiNo ratings yet
- Signal - Microsoft LearnDocument5 pagesSignal - Microsoft LearnShakti SharmaNo ratings yet
- Unix SignalsDocument42 pagesUnix SignalsRahul SreedharanNo ratings yet
- Exception Handling: Chapter SixDocument21 pagesException Handling: Chapter Sixjanasira1No ratings yet
- SignalDocument17 pagesSignalashish_mahanaNo ratings yet
- Lab 4 - SignalsDocument26 pagesLab 4 - SignalsNourhan TarekNo ratings yet
- Unit4 SignalsDocument10 pagesUnit4 SignalsAmrin MulaniNo ratings yet
- C++ Signal Handling: SR - No Signal & DescriptionDocument3 pagesC++ Signal Handling: SR - No Signal & DescriptionMirha KhanNo ratings yet
- Signals: Based On Chapter 12.5 of Text What If Something Unexpected or Unpredictable Happens?Document17 pagesSignals: Based On Chapter 12.5 of Text What If Something Unexpected or Unpredictable Happens?Navdeep JimmyNo ratings yet
- Cours 05 SignalsDocument115 pagesCours 05 SignalsSai Venkat GudlaNo ratings yet
- CS312 Lec 11 12Document15 pagesCS312 Lec 11 12syedbasimmehmood1No ratings yet
- 19b-Signals SolDocument15 pages19b-Signals Solid00824678No ratings yet
- UNIT II Application Development: TCP Echo ServerDocument38 pagesUNIT II Application Development: TCP Echo ServerSundariNo ratings yet
- Notes - UP MODULE 5Document31 pagesNotes - UP MODULE 5kavitha GLNo ratings yet
- Sigaction: by Prithiviraj.MDocument12 pagesSigaction: by Prithiviraj.MEbinKThomasNo ratings yet
- All About Linux Signals - Linux Programming BlogDocument20 pagesAll About Linux Signals - Linux Programming BlogBattula Yagna Srinath ReddyNo ratings yet
- Lab 12Document17 pagesLab 12Naz MemonNo ratings yet
- Unix LinuxDocument5 pagesUnix LinuxkrkamaNo ratings yet
- OS LAb 10Document11 pagesOS LAb 10Furious UploadNo ratings yet
- Kernel Chintech Notes3Document51 pagesKernel Chintech Notes3Rishad SoofiNo ratings yet
- CS 241 Discussion SectionDocument11 pagesCS 241 Discussion Sectionjaime_parada3097No ratings yet
- Unix Network ProgrammingDocument36 pagesUnix Network Programmingmiraclesuresh100% (1)
- Unit 6Document36 pagesUnit 6VAMSI KRISHNA KURAPATINo ratings yet
- FahadKhan OS Lab10Document18 pagesFahadKhan OS Lab10Furious UploadNo ratings yet
- Signals: Signals Can Be Numbered From 0 To 31Document3 pagesSignals: Signals Can Be Numbered From 0 To 31Idhigo AguggsNo ratings yet
- 09 SignalsDocument11 pages09 Signalsshrutika joriNo ratings yet
- CS 201 Signals: Gerson Robboy Portland State UniversityDocument27 pagesCS 201 Signals: Gerson Robboy Portland State Universityr_k_sNo ratings yet
- Interprocess Communication MechanismsDocument12 pagesInterprocess Communication MechanismsAnjana DeviNo ratings yet
- Interprocess Communication in Unix: An Introduction To Concurrent ProgrammingDocument122 pagesInterprocess Communication in Unix: An Introduction To Concurrent ProgrammingAndré PerdigãoNo ratings yet
- CS312 Lec 10Document12 pagesCS312 Lec 10syedbasimmehmood1No ratings yet
- Signal Handling in UnixDocument20 pagesSignal Handling in Unixlakhdive3937No ratings yet
- VWV FinalyDocument11 pagesVWV FinalyYogesh PolNo ratings yet
- Signaling &interrupts in The Operating SystemDocument10 pagesSignaling &interrupts in The Operating SystemRagmahale RohitNo ratings yet
- Oo Design Linux Kernel Interrupts SubsystemDocument17 pagesOo Design Linux Kernel Interrupts SubsystemHariKrishna PatnalaNo ratings yet
- UntitledDocument45 pagesUntitledjemNo ratings yet
- DEH-X500BT DEH-S4150BT: CD Rds Receiver Receptor de CD Con Rds CD Player Com RdsDocument53 pagesDEH-X500BT DEH-S4150BT: CD Rds Receiver Receptor de CD Con Rds CD Player Com RdsLUIS MANUEL RINCON100% (1)
- Basic Elements of The Communication ProcessDocument13 pagesBasic Elements of The Communication ProcessMech JTubao67% (3)
- Graphs in ChemDocument10 pagesGraphs in Chemzhaney0625No ratings yet
- Number SystemsDocument25 pagesNumber SystemsMehwish BilalNo ratings yet
- 11 My Immigration Story - Tan Le QuestionsDocument3 pages11 My Immigration Story - Tan Le QuestionsMallika Nand NairNo ratings yet
- Capital Structure UploadDocument17 pagesCapital Structure UploadLakshmi Harshitha mNo ratings yet
- CH 3 TestDocument50 pagesCH 3 TestVK ACCANo ratings yet
- Effect of Social Economic Factors On Profitability of Soya Bean in RwandaDocument7 pagesEffect of Social Economic Factors On Profitability of Soya Bean in RwandaMarjery Fiona ReyesNo ratings yet
- Free Vibration of SDOFDocument2 pagesFree Vibration of SDOFjajajajNo ratings yet
- Russian Sec 2023-24Document2 pagesRussian Sec 2023-24Shivank PandeyNo ratings yet
- Structure of An Atom Revision PaperDocument5 pagesStructure of An Atom Revision PaperZoe Kim ChinguwaNo ratings yet
- Kalbelia Dance Rajasthan - Kalbelia Rajasthani Folk Dance KalbeliaDocument6 pagesKalbelia Dance Rajasthan - Kalbelia Rajasthani Folk Dance KalbeliarahulgabdaNo ratings yet
- New Life in Christ - Vol05 - Engl - Teacher GuideDocument29 pagesNew Life in Christ - Vol05 - Engl - Teacher GuideOliver Angus100% (1)
- UW Mathematics Professor Evaluations For Fall 2011Document241 pagesUW Mathematics Professor Evaluations For Fall 2011DPNo ratings yet
- Danielson Observation FormDocument5 pagesDanielson Observation Formapi-242909722No ratings yet
- Three Moment Equation For BeamsDocument12 pagesThree Moment Equation For BeamsRico EstevaNo ratings yet
- Cottrell Park Golf Club 710Document11 pagesCottrell Park Golf Club 710Mulligan PlusNo ratings yet
- Nur Syamimi - Noor Nasruddin - Presentation - 1002 - 1010 - 1024Document14 pagesNur Syamimi - Noor Nasruddin - Presentation - 1002 - 1010 - 1024abdulhasnalNo ratings yet
- How Do I Predict Event Timing Saturn Nakshatra PDFDocument5 pagesHow Do I Predict Event Timing Saturn Nakshatra PDFpiyushNo ratings yet
- RULE 130 Rules of CourtDocument141 pagesRULE 130 Rules of CourtalotcepilloNo ratings yet
- Culture NegotiationsDocument17 pagesCulture NegotiationsShikha SharmaNo ratings yet
- A Visual Rhetoric StudyDocument32 pagesA Visual Rhetoric StudylpettenkoferNo ratings yet
- Selling AIESEC To Your TargetsDocument7 pagesSelling AIESEC To Your TargetspijoowiseNo ratings yet
- Post Market Surveillance SOPDocument8 pagesPost Market Surveillance SOPgopinathNo ratings yet
- ESUR Guidelines 10.0 Final VersionDocument46 pagesESUR Guidelines 10.0 Final Versionkon shireNo ratings yet
- Scan 03-Jan-2020 PDFDocument2 pagesScan 03-Jan-2020 PDFPavanSharmaNo ratings yet
- Ga2 27:6:23Document1 pageGa2 27:6:23john HuntNo ratings yet
- 5 Waves AnswersDocument2 pages5 Waves AnswersNoor Ulain NabeelaNo ratings yet
- Altium Designer Training For Schematic Capture and PCB EditingDocument248 pagesAltium Designer Training For Schematic Capture and PCB EditingAntonio Dx80% (5)
- Grokking Algorithms: An illustrated guide for programmers and other curious peopleFrom EverandGrokking Algorithms: An illustrated guide for programmers and other curious peopleRating: 4 out of 5 stars4/5 (16)
- Python for Beginners: A Crash Course Guide to Learn Python in 1 WeekFrom EverandPython for Beginners: A Crash Course Guide to Learn Python in 1 WeekRating: 4.5 out of 5 stars4.5/5 (7)
- Once Upon an Algorithm: How Stories Explain ComputingFrom EverandOnce Upon an Algorithm: How Stories Explain ComputingRating: 4 out of 5 stars4/5 (43)
- Excel Essentials: A Step-by-Step Guide with Pictures for Absolute Beginners to Master the Basics and Start Using Excel with ConfidenceFrom EverandExcel Essentials: A Step-by-Step Guide with Pictures for Absolute Beginners to Master the Basics and Start Using Excel with ConfidenceNo ratings yet
- Clean Code: A Handbook of Agile Software CraftsmanshipFrom EverandClean Code: A Handbook of Agile Software CraftsmanshipRating: 5 out of 5 stars5/5 (13)
- Learn Python Programming for Beginners: Best Step-by-Step Guide for Coding with Python, Great for Kids and Adults. Includes Practical Exercises on Data Analysis, Machine Learning and More.From EverandLearn Python Programming for Beginners: Best Step-by-Step Guide for Coding with Python, Great for Kids and Adults. Includes Practical Exercises on Data Analysis, Machine Learning and More.Rating: 5 out of 5 stars5/5 (34)
- Blockchain Basics: A Non-Technical Introduction in 25 StepsFrom EverandBlockchain Basics: A Non-Technical Introduction in 25 StepsRating: 4.5 out of 5 stars4.5/5 (24)
- How to Make a Video Game All By Yourself: 10 steps, just you and a computerFrom EverandHow to Make a Video Game All By Yourself: 10 steps, just you and a computerRating: 5 out of 5 stars5/5 (1)
- Microsoft 365 Guide to Success: 10 Books in 1 | Kick-start Your Career Learning the Key Information to Master Your Microsoft Office Files to Optimize Your Tasks & Surprise Your Colleagues | Access, Excel, OneDrive, Outlook, PowerPoint, Word, Teams, etc.From EverandMicrosoft 365 Guide to Success: 10 Books in 1 | Kick-start Your Career Learning the Key Information to Master Your Microsoft Office Files to Optimize Your Tasks & Surprise Your Colleagues | Access, Excel, OneDrive, Outlook, PowerPoint, Word, Teams, etc.Rating: 5 out of 5 stars5/5 (2)
- Coders at Work: Reflections on the Craft of ProgrammingFrom EverandCoders at Work: Reflections on the Craft of ProgrammingRating: 4 out of 5 stars4/5 (151)
- Python Programming For Beginners: Learn The Basics Of Python Programming (Python Crash Course, Programming for Dummies)From EverandPython Programming For Beginners: Learn The Basics Of Python Programming (Python Crash Course, Programming for Dummies)Rating: 5 out of 5 stars5/5 (1)
- Understanding Software: Max Kanat-Alexander on simplicity, coding, and how to suck less as a programmerFrom EverandUnderstanding Software: Max Kanat-Alexander on simplicity, coding, and how to suck less as a programmerRating: 4.5 out of 5 stars4.5/5 (44)
- Machine Learning: The Ultimate Beginner's Guide to Learn Machine Learning, Artificial Intelligence & Neural Networks Step by StepFrom EverandMachine Learning: The Ultimate Beginner's Guide to Learn Machine Learning, Artificial Intelligence & Neural Networks Step by StepRating: 4.5 out of 5 stars4.5/5 (19)
- Nine Algorithms That Changed the Future: The Ingenious Ideas That Drive Today's ComputersFrom EverandNine Algorithms That Changed the Future: The Ingenious Ideas That Drive Today's ComputersRating: 5 out of 5 stars5/5 (7)
- What Algorithms Want: Imagination in the Age of ComputingFrom EverandWhat Algorithms Want: Imagination in the Age of ComputingRating: 3.5 out of 5 stars3.5/5 (41)
- Software Engineering at Google: Lessons Learned from Programming Over TimeFrom EverandSoftware Engineering at Google: Lessons Learned from Programming Over TimeRating: 4 out of 5 stars4/5 (11)
- GAMEDEV: 10 Steps to Making Your First Game SuccessfulFrom EverandGAMEDEV: 10 Steps to Making Your First Game SuccessfulRating: 4.5 out of 5 stars4.5/5 (12)