You might also like
- A New System of Alternating Current Motors and Transformers and Other EssaysFrom EverandA New System of Alternating Current Motors and Transformers and Other EssaysRating: 5 out of 5 stars5/5 (1)
- A New System of Alternating Current Motors and TransformersFrom EverandA New System of Alternating Current Motors and TransformersRating: 1 out of 5 stars1/5 (1)
- Smoke Sensor ModuleDocument54 pagesSmoke Sensor ModuleakashNo ratings yet
- Documentation Stepper MotorDocument22 pagesDocumentation Stepper MotorsolidwormNo ratings yet
- Department of Electronics & Communication Course: Microcontroller Based System Design Course Code: ECE-358Document8 pagesDepartment of Electronics & Communication Course: Microcontroller Based System Design Course Code: ECE-358Varun SinghNo ratings yet
- Stepper Motor Theory of OperationDocument11 pagesStepper Motor Theory of OperationSherif EltoukhiNo ratings yet
- Ecd Major Project ReportDocument16 pagesEcd Major Project ReportKuldip GorNo ratings yet
- Stepper MotorDocument58 pagesStepper Motorjayaweerawgn100% (1)
- Stepper MotorDocument10 pagesStepper Motorgsudhanta1604No ratings yet
- Stepper Motor Operation & C Language Program CodeDocument16 pagesStepper Motor Operation & C Language Program CodeHendrie TanNo ratings yet
- Chapter 3Document42 pagesChapter 3meeedooo.abo.elenenNo ratings yet
- Brushless DC MotorsDocument21 pagesBrushless DC MotorsSRL MECHNo ratings yet
- 1 Electric Motor BasicsDocument13 pages1 Electric Motor BasicsPandaGendutNo ratings yet
- Stepper MotorDocument16 pagesStepper MotorpaviliondmNo ratings yet
- ALTERNATORDocument7 pagesALTERNATOR221 Siddhant shitoleNo ratings yet
- Servomotor Construction: Stator and A Rotating Magnetic FieldDocument19 pagesServomotor Construction: Stator and A Rotating Magnetic FieldctsakNo ratings yet
- Unit 1 Co1Document31 pagesUnit 1 Co1Gokul anandNo ratings yet
- Unit 3 Three Phase Alternator PDFDocument38 pagesUnit 3 Three Phase Alternator PDFPalak JioNo ratings yet
- Single Phase Induction Motor and Stepper MotorDocument11 pagesSingle Phase Induction Motor and Stepper MotorManthan deshmukhNo ratings yet
- 3.switched Reluctance MotorDocument15 pages3.switched Reluctance MotorAishwaryaNo ratings yet
- Machine 2Document19 pagesMachine 2Manvendra Singh ShekhawatNo ratings yet
- Unit8-Induction MotorDocument40 pagesUnit8-Induction MotorsaravananNo ratings yet
- Assignment 2Document5 pagesAssignment 2Nadiah NasirNo ratings yet
- Salient and Non Salient Pole GeneratorsDocument7 pagesSalient and Non Salient Pole Generatorsharshil mangeNo ratings yet
- Stepper MotorDocument14 pagesStepper MotorShivan BiradarNo ratings yet
- Information-No - 1 1 7-1Document12 pagesInformation-No - 1 1 7-1Black PearlNo ratings yet
- Unit 3 PMBLDC MotorDocument14 pagesUnit 3 PMBLDC MotorSuganthiNo ratings yet
- Chapter 4 - Induction Motor Drives - Part1Document45 pagesChapter 4 - Induction Motor Drives - Part1Zafirah HanafiNo ratings yet
- Basic Induction (AC) Motor OperationDocument5 pagesBasic Induction (AC) Motor OperationMathews IndiaNo ratings yet
- 3.18 Ac MotorsDocument25 pages3.18 Ac Motorsdeleted Yt acc.No ratings yet
- LN08Document9 pagesLN08ruzgaryilmazz5No ratings yet
- Construction of SRMDocument5 pagesConstruction of SRMdhanusiya balamuruganNo ratings yet
- Get Your Motor RunningDocument10 pagesGet Your Motor RunningwirantoNo ratings yet
- Construction of SRMDocument3 pagesConstruction of SRMKartikey PraveenNo ratings yet
- Unit Iii Switched Reluctance MotorDocument18 pagesUnit Iii Switched Reluctance MotorMürlî MünnâNo ratings yet
- Application of DC Shunt MotorDocument5 pagesApplication of DC Shunt MotorPrajwal Deep RaiNo ratings yet
- BLDC PDFDocument36 pagesBLDC PDFZariz ZakianNo ratings yet
- A Stepper, or Stepping Motor ConvertsDocument25 pagesA Stepper, or Stepping Motor ConvertsFaizan SaeedNo ratings yet
- Stepper MotorDocument18 pagesStepper MotorLasantha Abeykoon67% (3)
- DC Brushless MotorDocument10 pagesDC Brushless MotorSyed MamnoonNo ratings yet
- Types of Stepper MotorDocument6 pagesTypes of Stepper MotorFazal Aziz WaliNo ratings yet
- AC Motor ReportDocument8 pagesAC Motor ReportbafulcherNo ratings yet
- Types of AlternatorsDocument12 pagesTypes of AlternatorsHamoudRazaMazherNo ratings yet
- Document PDFDocument21 pagesDocument PDFHarizx SaufixNo ratings yet
- Disadvantages of Armature Resistence Control: What Is The Function of Commutator?Document4 pagesDisadvantages of Armature Resistence Control: What Is The Function of Commutator?SovanNo ratings yet
- Module1.Stepper Motor and Its ControlDocument79 pagesModule1.Stepper Motor and Its ControlOmkar GuptaNo ratings yet
- Module 2 - Switched Reluctance MotorDocument20 pagesModule 2 - Switched Reluctance MotorkesavantNo ratings yet
- Mod5 - MECHATRONICS IN ROBOTICSDocument34 pagesMod5 - MECHATRONICS IN ROBOTICSDeepa Ragav RNo ratings yet
- Stepper Motor Handwritten NotesDocument7 pagesStepper Motor Handwritten Notesstudy plus 7No ratings yet
- of SRMDocument22 pagesof SRMGopoji Dayanand71% (7)
- ALTERNATORDocument21 pagesALTERNATORRushikesh WandhekarNo ratings yet
- Application of DC Shunt Motor: Lovely Professional University Amit Raj ROLL NO-RB4802A28 Reg. No-10803543 B.Tech - MEDocument5 pagesApplication of DC Shunt Motor: Lovely Professional University Amit Raj ROLL NO-RB4802A28 Reg. No-10803543 B.Tech - MEshailesh singhNo ratings yet
- Unit3 (Ac Drives)Document20 pagesUnit3 (Ac Drives)vedala chaitanyaNo ratings yet
- 3 Phase MotorDocument26 pages3 Phase MotorSOBIT KUMARNo ratings yet
- Module 6: A.C. Electrical Machines For Hybrid and Electric VehiclesDocument65 pagesModule 6: A.C. Electrical Machines For Hybrid and Electric VehiclesDeepak mishraNo ratings yet
- Module 5 Notes MTRDocument14 pagesModule 5 Notes MTRAbhijith JoseNo ratings yet
- Home-made Toy Motors: A practical handbook giving detailed instructions for building simple but operative electric motorsFrom EverandHome-made Toy Motors: A practical handbook giving detailed instructions for building simple but operative electric motorsNo ratings yet
- Study of a reluctance magnetic gearbox for energy storage system applicationFrom EverandStudy of a reluctance magnetic gearbox for energy storage system applicationRating: 1 out of 5 stars1/5 (1)
- Advanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkFrom EverandAdvanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkNo ratings yet
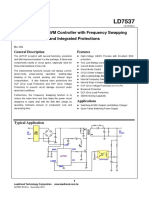
- LD 7537 - Controlador PWMDocument16 pagesLD 7537 - Controlador PWMTiago LeonhardtNo ratings yet
- SandbanksDocument9 pagesSandbanksVic ToguinzNo ratings yet
- Katalog 120212Document8 pagesKatalog 120212Agus ZulhendriNo ratings yet
- Wiring Diagram of Universal MotorDocument10 pagesWiring Diagram of Universal MotorYunus SiregarNo ratings yet
- D8 ATA 24 Electrical PowerDocument89 pagesD8 ATA 24 Electrical Powerrav100% (1)
- ECEN 214 Lab 4Document14 pagesECEN 214 Lab 4Shoaib AhmedNo ratings yet
- PCC/MCC Feeder Operation Check ListDocument2 pagesPCC/MCC Feeder Operation Check Listsuperthambi0% (1)
- P98117-E-A-DRW-005 - Schematic Diagram - 1Document31 pagesP98117-E-A-DRW-005 - Schematic Diagram - 1HayxalNo ratings yet
- Invertor 5000wattDocument27 pagesInvertor 5000wattFlorinNo ratings yet
- Motortech Application Guide Waukesha VHP Series 01.00.014 en 2018 02Document76 pagesMotortech Application Guide Waukesha VHP Series 01.00.014 en 2018 02Edison MataNo ratings yet
- 1107 Datasheet MiCS 2714Document5 pages1107 Datasheet MiCS 2714Dimas Prasetyo UtomoNo ratings yet
- DRX 125 HP DRX 250 HP DRX 630: The Mccbs That Easily Fit Your InstallationDocument30 pagesDRX 125 HP DRX 250 HP DRX 630: The Mccbs That Easily Fit Your InstallationNguyen AnhNo ratings yet
- Allen-Bradley PLC Wiring SystemsDocument196 pagesAllen-Bradley PLC Wiring SystemsKiliardt Scmidt100% (3)
- 8 3-Ph. Ind Motor Starting & Speed ControlDocument26 pages8 3-Ph. Ind Motor Starting & Speed ControlFos AlharbiNo ratings yet
- Spectra RMS Molded Case Circuit Breakers: GEH-702 Users ManualDocument52 pagesSpectra RMS Molded Case Circuit Breakers: GEH-702 Users Manualnabil160874100% (1)
- Bipolar Junction TransistorDocument6 pagesBipolar Junction TransistorPadirikuppam PavithraNo ratings yet
- Ece 249 Syl Lab Us Ip DownloadDocument2 pagesEce 249 Syl Lab Us Ip DownloadNiraj NillawarNo ratings yet
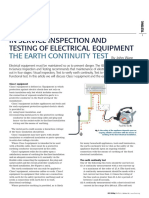
- In Service Inspection and Testing of Electrical Equipment: The Earth Continuity TestDocument3 pagesIn Service Inspection and Testing of Electrical Equipment: The Earth Continuity TestAlliver SapitulaNo ratings yet
- Vips 98Document1 pageVips 98santhoshNo ratings yet
- Arteche CT Trafvthv enDocument8 pagesArteche CT Trafvthv enmeraatNo ratings yet
- X-Band RF Power Sources For Accelerator Applications Mark F. Kirshner, Richard D. Kowalczyk, Craig B. Wilsen, Richard B. True, Ian T. Simpson and John T. WrayDocument1 pageX-Band RF Power Sources For Accelerator Applications Mark F. Kirshner, Richard D. Kowalczyk, Craig B. Wilsen, Richard B. True, Ian T. Simpson and John T. WrayKushan RahulNo ratings yet
- Synchronous Motor: Motor On Load With Constant ExcitationDocument7 pagesSynchronous Motor: Motor On Load With Constant ExcitationShoaib KhanNo ratings yet
- Flat Pack 1500Document2 pagesFlat Pack 1500Asim Khan NiaziNo ratings yet
- 20NC60VD STMicroelectronicsDocument11 pages20NC60VD STMicroelectronicscristianNo ratings yet
- BOM E - Bike Electrical V1.0Document10 pagesBOM E - Bike Electrical V1.0SHUBHAM SRIVASTAVA100% (1)
- Design of Distribution SubstationsDocument76 pagesDesign of Distribution SubstationsNamira100% (1)
- Toyota Cressida Electrical Wiring Diagram: Section NoDocument156 pagesToyota Cressida Electrical Wiring Diagram: Section NoVictor Nuñez100% (4)
- Unit-IV - OP-AMP and Its ApplicationsDocument64 pagesUnit-IV - OP-AMP and Its ApplicationsJadhav BhagavatNo ratings yet
- Ee2bjt 1 QDocument90 pagesEe2bjt 1 QDr. RISHA MALNo ratings yet
- M-Series Electromagnetic Flow Meter Converter: Installation, Operation and Maintenance ManualDocument45 pagesM-Series Electromagnetic Flow Meter Converter: Installation, Operation and Maintenance ManualRodrigo CiezaNo ratings yet