You might also like
- Truth About Reptilian Alien RacesDocument12 pagesTruth About Reptilian Alien RacesSuripeddi Koundinya60% (5)
- Dynamics of Rigid Bodies PDFDocument138 pagesDynamics of Rigid Bodies PDFGrachelle Ann PabloNo ratings yet
- Lines of Latitude and Longitude WorksheetDocument9 pagesLines of Latitude and Longitude Worksheetrenegade 1No ratings yet
- WMM Mix DesignDocument44 pagesWMM Mix DesignAshok amlapure100% (1)
- Spherical Mirror Ray Diagram WorksheetDocument3 pagesSpherical Mirror Ray Diagram Worksheethetero100% (1)
- Setting and Verification of Generation Protection To Meet NERC Reliability StandardsDocument7 pagesSetting and Verification of Generation Protection To Meet NERC Reliability StandardsalimaghamiNo ratings yet
- Circuit Breaker Sizing IEEE Areva Oct 09Document20 pagesCircuit Breaker Sizing IEEE Areva Oct 09George GeorgeNo ratings yet
- Cigre PMU and FACTS PDFDocument8 pagesCigre PMU and FACTS PDFNando LópezNo ratings yet
- IEEE - Modeling Guidelines For Switching TransientsDocument24 pagesIEEE - Modeling Guidelines For Switching TransientsgustavopaloNo ratings yet
- AD Sun and Wind DirectionDocument6 pagesAD Sun and Wind DirectionKeena Perez100% (1)
- Close and Trip Relay - Electric Power & Transmission & Distribution - Eng-Ti PDFDocument11 pagesClose and Trip Relay - Electric Power & Transmission & Distribution - Eng-Ti PDFalimaghamiNo ratings yet
- Steady State Co Simulation With Digsilent Programacion C DSL DLLDocument6 pagesSteady State Co Simulation With Digsilent Programacion C DSL DLLDavid Jose Poma GuillenNo ratings yet
- Activity 11.2 Observing Technology Integration in The Classroom InstructionsDocument5 pagesActivity 11.2 Observing Technology Integration in The Classroom InstructionsBon Ivan Firmeza0% (1)
- Discrete Open Loop Control For Power Oscillation DampingDocument6 pagesDiscrete Open Loop Control For Power Oscillation Dampingdemy antonyNo ratings yet
- ! DISCRETE SW-Mod HysteresisDocument7 pages! DISCRETE SW-Mod HysteresisIonut DraganNo ratings yet
- DynamicDocument7 pagesDynamicRex abbasNo ratings yet
- Time-Varying Effects and Averaging Issues in Models For Current-Mode ControlDocument9 pagesTime-Varying Effects and Averaging Issues in Models For Current-Mode ControlsamNo ratings yet
- Modern Power System Analysis ToolsDocument6 pagesModern Power System Analysis ToolsElliott M.No ratings yet
- Education DTC 380 PDFDocument6 pagesEducation DTC 380 PDFНебојша МитровићNo ratings yet
- 2.maths - Ijms - Nonlinear - Sundaram RDocument8 pages2.maths - Ijms - Nonlinear - Sundaram Riaset123No ratings yet
- Generalized Averaging Method For Power Conversion Circuits: Seth R. Sanders, Z. Liu, and George C - VergheseDocument9 pagesGeneralized Averaging Method For Power Conversion Circuits: Seth R. Sanders, Z. Liu, and George C - VergheseLazaro S. EscalanteNo ratings yet
- Power Quality Analysis Using An Adaptive Decomposition StructureDocument5 pagesPower Quality Analysis Using An Adaptive Decomposition StructureZahira Javed RNo ratings yet
- Adaptive Distance Protection Compensated: Transmission LinesDocument6 pagesAdaptive Distance Protection Compensated: Transmission LinesthavaselvanNo ratings yet
- Automatic Symbolic Verification of Embedded SystemsDocument37 pagesAutomatic Symbolic Verification of Embedded SystemsmonisivaNo ratings yet
- State Space Model of Grid Connected Inverters Under Current Control ModeDocument10 pagesState Space Model of Grid Connected Inverters Under Current Control Modeoussama sadkiNo ratings yet
- Freijedo, 2009Document14 pagesFreijedo, 2009EdsonNo ratings yet
- Robust Event-Driven Dynamic Simulation Using Power Flow: Aayushya Agarwal, Amritanshu Pandey, Larry PileggiDocument7 pagesRobust Event-Driven Dynamic Simulation Using Power Flow: Aayushya Agarwal, Amritanshu Pandey, Larry PileggiM8ow6fNo ratings yet
- Delay Margin Comparisons For Power Systems With Constant and Time-Varying DelaysDocument8 pagesDelay Margin Comparisons For Power Systems With Constant and Time-Varying DelaysM8ow6fNo ratings yet
- Modul 3 Mathematical Modeling of Dynamic SystemsDocument12 pagesModul 3 Mathematical Modeling of Dynamic SystemsGiraldo SihombingNo ratings yet
- Impact of Grounding System Design On PowDocument5 pagesImpact of Grounding System Design On PowSergio HZNo ratings yet
- Finite-Time H Filtering of Time-Delay Stochastic Jump Systems With Unbiased EstimationDocument13 pagesFinite-Time H Filtering of Time-Delay Stochastic Jump Systems With Unbiased EstimationKarima ChakerNo ratings yet
- Analysis and Control of Temporary Overvoltages For Automated Restoration PlanningDocument7 pagesAnalysis and Control of Temporary Overvoltages For Automated Restoration PlanningArief Fajar MaulanaNo ratings yet
- Design of Network For Flexible Transmission Systems: Robust and Adaptive Neural ACDocument8 pagesDesign of Network For Flexible Transmission Systems: Robust and Adaptive Neural ACvireshmathadNo ratings yet
- Archive of SID: Dynamic Controllers Design For STATCOMDocument7 pagesArchive of SID: Dynamic Controllers Design For STATCOMRajaavikhram YohanandhanNo ratings yet
- A Wavelet - Based Fault LocalizationDocument5 pagesA Wavelet - Based Fault LocalizationOmar Chayña VelásquezNo ratings yet
- Short Circuit Fault Classification and LDocument13 pagesShort Circuit Fault Classification and Lዛላው መናNo ratings yet
- Discrete-Time Sliding Mode Control of Permanent Magnet Linear Synchronous Motor in High-Performance Motion With Large Parameter UncertaintyDocument4 pagesDiscrete-Time Sliding Mode Control of Permanent Magnet Linear Synchronous Motor in High-Performance Motion With Large Parameter UncertaintyElzan AgungNo ratings yet
- Application of Singular Perturbations Theory To Power System Modeling and Stability AnalysisDocument7 pagesApplication of Singular Perturbations Theory To Power System Modeling and Stability AnalysisGayathri GnanaiyaNo ratings yet
- Wide-Area Damping Control For Interarea Oscillations in Power Grids Based On PMU MeasurementsDocument6 pagesWide-Area Damping Control For Interarea Oscillations in Power Grids Based On PMU MeasurementsPartheban PcmNo ratings yet
- Mohiti Et Al. - 2013 - Optimal Placement and Tuning of TCSC For Damping OscillationsDocument5 pagesMohiti Et Al. - 2013 - Optimal Placement and Tuning of TCSC For Damping OscillationsHarish KumarNo ratings yet
- Compensation by TCSC in Open Loop Control System: Research PaperDocument5 pagesCompensation by TCSC in Open Loop Control System: Research Paperrathorsumit2006No ratings yet
- System Level Simulation of Servo Accelerometer in SimulinkDocument8 pagesSystem Level Simulation of Servo Accelerometer in Simulinkohpigha6048No ratings yet
- A Fuzzy Inference System To Voltage/Var Control in Dms - Distribution Management SystemDocument6 pagesA Fuzzy Inference System To Voltage/Var Control in Dms - Distribution Management SystemBogdan VicolNo ratings yet
- On Continuous Control of PWM Inverters in The Overmodulation RanDocument6 pagesOn Continuous Control of PWM Inverters in The Overmodulation RanAshish KushwahaNo ratings yet
- TCPSTDocument9 pagesTCPSTmartinezjose192No ratings yet
- Michael J. McCourt, P. J. Antsaklis 2013 Control of Networked Switched SystemsDocument10 pagesMichael J. McCourt, P. J. Antsaklis 2013 Control of Networked Switched SystemsFelix GamarraNo ratings yet
- 9609 PDFDocument13 pages9609 PDFnaghamNo ratings yet
- Automatic Symbolic Verification Embedded Systems: Rajeev Alur, Thomas A. Henzinger, and Pei-Hsin HoDocument21 pagesAutomatic Symbolic Verification Embedded Systems: Rajeev Alur, Thomas A. Henzinger, and Pei-Hsin Ho3lok 3lNo ratings yet
- 1305 0978 PDFDocument10 pages1305 0978 PDFMohammad HosseiniNo ratings yet
- Ot Omega 2007Document2 pagesOt Omega 2007Diogo MarujoNo ratings yet
- Analysis of Oscillations With Eigenanalysis andDocument8 pagesAnalysis of Oscillations With Eigenanalysis andMadhusudhan SrinivasanNo ratings yet
- 2310 12158Document17 pages2310 12158sdfasddfasdfasfdsafNo ratings yet
- A Closed Loop Quasi Optical Dynamic Brak PDFDocument8 pagesA Closed Loop Quasi Optical Dynamic Brak PDFDante FilhoNo ratings yet
- The Control Based On The Genetic Algorithm For Nonlinear SVC SystemsDocument8 pagesThe Control Based On The Genetic Algorithm For Nonlinear SVC SystemserpublicationNo ratings yet
- Transient Stability Analysis of The IEEE 14-Bus Test System Using Dynamic Computation For Power Systems (DCPS)Document6 pagesTransient Stability Analysis of The IEEE 14-Bus Test System Using Dynamic Computation For Power Systems (DCPS)Nirmal mehtaNo ratings yet
- Wang Da - Ph.D. ThesisDocument162 pagesWang Da - Ph.D. ThesisMary MorseNo ratings yet
- Introdn To SystemsDocument7 pagesIntrodn To SystemsHarshal SpNo ratings yet
- Enhancement of Power System Dynamics Using A Novel Series Compensation SchemeDocument7 pagesEnhancement of Power System Dynamics Using A Novel Series Compensation SchemeIJMERNo ratings yet
- A Three-Phase Power Flow Method For Real-Time Distribution System Analysis SDocument9 pagesA Three-Phase Power Flow Method For Real-Time Distribution System Analysis Scapostolopoulos81_90No ratings yet
- Modeling and Simulation of SRF and P-Q Based Control DstatcomDocument7 pagesModeling and Simulation of SRF and P-Q Based Control DstatcomIJERDNo ratings yet
- Gain and Phase Margin Multiloop LQG Regulators: TheoryDocument7 pagesGain and Phase Margin Multiloop LQG Regulators: TheoryReta JibatNo ratings yet
- 2000 BRCDocument8 pages2000 BRCdavidhartshorneNo ratings yet
- A New Method For Blocking Third-Zone Distance Relays During Stable Power SwingsDocument8 pagesA New Method For Blocking Third-Zone Distance Relays During Stable Power SwingsRahul SawantNo ratings yet
- Pole-Placement Designs of Power System StabilizersDocument7 pagesPole-Placement Designs of Power System StabilizersabelcatayNo ratings yet
- Study On Fast Control Algorithm Based On Integrative Sensitivity AnalysisDocument4 pagesStudy On Fast Control Algorithm Based On Integrative Sensitivity AnalysisIzudin SoftićNo ratings yet
- Sensorless Three-Phase Induction Motor Direct TorqDocument7 pagesSensorless Three-Phase Induction Motor Direct TorqSakthivelNo ratings yet
- Technology: Schweppe CambridgeDocument6 pagesTechnology: Schweppe CambridgeAnonymous eOLCLhNo ratings yet
- Load-Frequency Control in A Two-Area Power System Using The Fuzzy PID MethodDocument23 pagesLoad-Frequency Control in A Two-Area Power System Using The Fuzzy PID MethodpetruskaraNo ratings yet
- Rogers G. Demistifying Power System Oscillations. IEEE Computer Applications in Power. 1996Document6 pagesRogers G. Demistifying Power System Oscillations. IEEE Computer Applications in Power. 1996Pablo BurgosNo ratings yet
- Simulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorFrom EverandSimulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorNo ratings yet
- PES 20112 EMT TS ToolsDocument6 pagesPES 20112 EMT TS ToolsalimaghamiNo ratings yet
- CMC 256plus Technical Data ENUDocument3 pagesCMC 256plus Technical Data ENUalimaghamiNo ratings yet
- Moz Pap PDFDocument12 pagesMoz Pap PDFsulemankhalidNo ratings yet
- An Effective Controlled Islanding Method For Power Grid Through A Sequence of Optimization ProblemsDocument8 pagesAn Effective Controlled Islanding Method For Power Grid Through A Sequence of Optimization ProblemsalimaghamiNo ratings yet
- Protection Analysis-PerthDocument2 pagesProtection Analysis-PerthalimaghamiNo ratings yet
- V14i1 14Document10 pagesV14i1 14alimaghamiNo ratings yet
- Setting and Verification of Generation Protection To Meet NERC Reliability StandardsDocument7 pagesSetting and Verification of Generation Protection To Meet NERC Reliability StandardsalimaghamiNo ratings yet
- A Setting-Free Flux-Based Synchronous Generator Loss of Excitation ProtectionDocument11 pagesA Setting-Free Flux-Based Synchronous Generator Loss of Excitation ProtectionalimaghamiNo ratings yet
- Operation Simulation of Oos Relays Using Comtrade Files and Transient Stability AnalysisDocument10 pagesOperation Simulation of Oos Relays Using Comtrade Files and Transient Stability AnalysisbrolinbrNo ratings yet
- A Secure and Setting-Free Technique To Detect Loss of Field in Synchronous GeneratorsDocument10 pagesA Secure and Setting-Free Technique To Detect Loss of Field in Synchronous GeneratorsalimaghamiNo ratings yet
- Out-Of-Step Protection Fundamentals and Advancements: BstractDocument26 pagesOut-Of-Step Protection Fundamentals and Advancements: BstractalimaghamiNo ratings yet
- 7UT613 63x Manual PIXIT A2 V046101 en PDFDocument130 pages7UT613 63x Manual PIXIT A2 V046101 en PDFMJNo ratings yet
- Summary of WECC Voltage Stability Assessment MethodologyDocument7 pagesSummary of WECC Voltage Stability Assessment MethodologyalimaghamiNo ratings yet
- Siprotec 7SJ61Document427 pagesSiprotec 7SJ61alimaghamiNo ratings yet
- Product Information SIGRA V4 59Document26 pagesProduct Information SIGRA V4 59jhonnRamiroNo ratings yet
- State Estimation Distributed Processing: Reza Ebrahimian and Ross BaldickDocument7 pagesState Estimation Distributed Processing: Reza Ebrahimian and Ross BaldickalimaghamiNo ratings yet
- Siprotec: 3uhidfh 7deohrifrqwhqwv 'Dwdlqwkh0Rgexvuhjlvwhuv 6wdqgdugpdsslqj 6wdqgdugpdsslqj, QGH (Document78 pagesSiprotec: 3uhidfh 7deohrifrqwhqwv 'Dwdlqwkh0Rgexvuhjlvwhuv 6wdqgdugpdsslqj 6wdqgdugpdsslqj, QGH (alimaghamiNo ratings yet
- 1 2 3 4 5 6 7 8 9 10 Simatic PC Adapter USB: ManualDocument38 pages1 2 3 4 5 6 7 8 9 10 Simatic PC Adapter USB: ManualalimaghamiNo ratings yet
- P S T D S E: Ower Ystem Racking and Ynamic Tate StimationDocument8 pagesP S T D S E: Ower Ystem Racking and Ynamic Tate StimationalimaghamiNo ratings yet
- M C - E D B P S: Odern OST Fficient Igital Usbar Rotection OlutionsDocument26 pagesM C - E D B P S: Odern OST Fficient Igital Usbar Rotection OlutionsalimaghamiNo ratings yet
- Power System State Estimation: Modeling Error Effects and Impact On System OperationDocument1 pagePower System State Estimation: Modeling Error Effects and Impact On System OperationalimaghamiNo ratings yet
- 01 - Dynamic Testing of Distance ProtectionDocument19 pages01 - Dynamic Testing of Distance ProtectionalimaghamiNo ratings yet
- 7PA26 27 30 Catalog SIP E6Document5 pages7PA26 27 30 Catalog SIP E6tduskoNo ratings yet
- 7pa22 23 Catalog Sip E6Document3 pages7pa22 23 Catalog Sip E6feromagnetizamNo ratings yet
- 7pa30 PDF - Electrical EngineeringDocument5 pages7pa30 PDF - Electrical EngineeringalimaghamiNo ratings yet
- 7sj61 64C53000 L1840 C001 03Document88 pages7sj61 64C53000 L1840 C001 03Karthick DhanapalNo ratings yet
- C3 E030605Document4 pagesC3 E030605alimaghamiNo ratings yet
- Lecture 3 - DiasporaDocument6 pagesLecture 3 - DiasporaFinn SalisburyNo ratings yet
- Term-2 Cycle Test Schedule 2023-24Document2 pagesTerm-2 Cycle Test Schedule 2023-24sarassinging22No ratings yet
- Data Sheet 65hdDocument3 pagesData Sheet 65hdoniferNo ratings yet
- Chap1 Lec1 Introduction To NLODocument3 pagesChap1 Lec1 Introduction To NLOUzair AslamNo ratings yet
- Timings To Avoid Based On Ghatak Chakra - Mariocean@gmail - Com - GmailDocument3 pagesTimings To Avoid Based On Ghatak Chakra - Mariocean@gmail - Com - GmailMariana SantosNo ratings yet
- Driving TRDocument62 pagesDriving TRmary jane garcinesNo ratings yet
- Simple and Multiple Regression Models For Relationship Between Electrical Resistivity and Various Soil Properties For Soil Characterization PDFDocument10 pagesSimple and Multiple Regression Models For Relationship Between Electrical Resistivity and Various Soil Properties For Soil Characterization PDFPato MeraNo ratings yet
- Qualtrics Survey Software PostDocument13 pagesQualtrics Survey Software Postapi-283622630No ratings yet
- Bon SL Zoom Slit Lamp User and Service ManualDocument20 pagesBon SL Zoom Slit Lamp User and Service ManualRoberto FalconeNo ratings yet
- Organization of LifeDocument1 pageOrganization of LifeSiraj ShaikNo ratings yet
- 2018 (Vuorien Et Al)Document20 pages2018 (Vuorien Et Al)gowthami mNo ratings yet
- MODULE 2 The Nature of The Human PersonDocument8 pagesMODULE 2 The Nature of The Human PersonMary Grace Lobina ColamboNo ratings yet
- An Introduction: Edited by Matt Berry and Chris HodgsonDocument42 pagesAn Introduction: Edited by Matt Berry and Chris HodgsonezgiiNo ratings yet
- NT-M2 Wireless Laser Barcode ScannerDocument1 pageNT-M2 Wireless Laser Barcode ScanneradilNo ratings yet
- Argumentative EssayDocument8 pagesArgumentative Essayapi-272949288No ratings yet
- Endterm QAM II 2019 BCFDocument3 pagesEndterm QAM II 2019 BCFABHISHEK KUMAR SINGHNo ratings yet
- Road Check List Borrow ExcavationDocument2 pagesRoad Check List Borrow Excavationklp_kedarpNo ratings yet
- Unit Plan Template: Teacher Subject/Class/Course Unit Title Grade Level Duration: 10 Days Date/s: November 17Document5 pagesUnit Plan Template: Teacher Subject/Class/Course Unit Title Grade Level Duration: 10 Days Date/s: November 17api-546896006No ratings yet
- DRYERDocument1 pageDRYERJmbernabeNo ratings yet
- TI-EN-UVACURID C81 FarbserieDocument12 pagesTI-EN-UVACURID C81 FarbseriePatxi hernandez suellesNo ratings yet
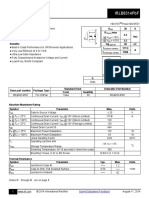
- Irlb8314Pbf: Application V 30 V R Max 2.4 M 3.2 QG 40 NC I 171 A I 130ADocument8 pagesIrlb8314Pbf: Application V 30 V R Max 2.4 M 3.2 QG 40 NC I 171 A I 130AJosè Miguel López RodriguezNo ratings yet
- Process Optimisation in Sunower Oil Extraction by Supercritical CO2Document12 pagesProcess Optimisation in Sunower Oil Extraction by Supercritical CO2Davide Di ZioNo ratings yet
- SN 74 Ls 245Document19 pagesSN 74 Ls 245Luisdceo LggNo ratings yet