You might also like
- Change Management PlanDocument8 pagesChange Management Planmarilynwalcott84100% (1)
- HealthOne Medical DD ProjectDocument4 pagesHealthOne Medical DD ProjectIrfan Darmawan0% (1)
- Seth Riggs Singing For The StarsDocument160 pagesSeth Riggs Singing For The StarsPedro Galeano100% (2)
- Digital Phase Lock LoopsDocument17 pagesDigital Phase Lock LoopsMegha BadadNo ratings yet
- Switched Capacitor CircuitsDocument50 pagesSwitched Capacitor CircuitsRaneforyon100% (1)
- 3-Discrete Cosine Transform PDFDocument87 pages3-Discrete Cosine Transform PDFHiteshNo ratings yet
- A Smart Approach For Design of Digitally Controlled Multiple-Output DC-DC ConverterDocument6 pagesA Smart Approach For Design of Digitally Controlled Multiple-Output DC-DC Convertert.benaissaNo ratings yet
- IIR - Digital Filters - MUKDocument54 pagesIIR - Digital Filters - MUKsumeetNo ratings yet
- DC LAB MANUAL FinalDocument39 pagesDC LAB MANUAL FinalTushar MaruNo ratings yet
- Discrete-Time IIR Filter Design From Continuous-Time FiltersDocument16 pagesDiscrete-Time IIR Filter Design From Continuous-Time FiltersstudentNo ratings yet
- CT Sigma Delta WhitePaperDocument8 pagesCT Sigma Delta WhitePaperSomnath KunduNo ratings yet
- M-D Systems (Filters) : - Impulse Response and MD ConvolutionDocument22 pagesM-D Systems (Filters) : - Impulse Response and MD ConvolutionFrabato EL MagoNo ratings yet
- AD and DA ConversionDocument15 pagesAD and DA ConversionmumamaduraiNo ratings yet
- T FF Using Gdi TechniqueDocument6 pagesT FF Using Gdi TechniquecNeeraNo ratings yet
- Lecture09 Performance 01Document33 pagesLecture09 Performance 01Bala KrishnaNo ratings yet
- Digital Signal Processing: Spectral Analysis of Nonstationary SignalsDocument10 pagesDigital Signal Processing: Spectral Analysis of Nonstationary SignalsMohamed shabanaNo ratings yet
- EEE C364/INSTR C364 Analog Electronics Integrated Circuit Power AmplifiersDocument16 pagesEEE C364/INSTR C364 Analog Electronics Integrated Circuit Power AmplifiersAngad SehdevNo ratings yet
- Charge Redistribution AdcDocument74 pagesCharge Redistribution AdcAnonymous eWMnRr70qNo ratings yet
- Digital Filter DesignDocument0 pagesDigital Filter DesignTechy GuyNo ratings yet
- Yin 2011Document11 pagesYin 2011Lâm Trần ThànhNo ratings yet
- ADC Pipeline LectureDocument29 pagesADC Pipeline LectureInJune YeoNo ratings yet
- Precision Analog Front Ends With Dual Slope ADC: Features: General DescriptionDocument38 pagesPrecision Analog Front Ends With Dual Slope ADC: Features: General DescriptionJosueEspinozaNo ratings yet
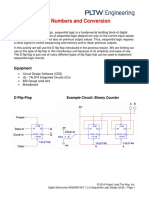
- 1.2.4.AK SequentialLogicDesign - Counters - DLBDocument7 pages1.2.4.AK SequentialLogicDesign - Counters - DLBSean MonahanNo ratings yet
- SMPSDocument46 pagesSMPSNimsiri AbhayasingheNo ratings yet
- Optical Switching EditedDocument82 pagesOptical Switching EditedVimoli MehtaNo ratings yet
- Slides THDocument95 pagesSlides THhassan razaNo ratings yet
- Time-to-Digital Converter: Guided ByDocument5 pagesTime-to-Digital Converter: Guided ByVineet SharmaNo ratings yet
- 1.2.4.AK SequentialLogicDesign - Counters - DMSDocument7 pages1.2.4.AK SequentialLogicDesign - Counters - DMSVince MNo ratings yet
- Debouncer v1 0Document5 pagesDebouncer v1 0Carlos MendozaNo ratings yet
- AD and DA Converter PrinciplesDocument18 pagesAD and DA Converter PrincipleskarkeraNo ratings yet
- 74HC HCT390 CNV 2Document8 pages74HC HCT390 CNV 2joaquin espalterNo ratings yet
- Chapter 8Document8 pagesChapter 8Aldon JimenezNo ratings yet
- Sine Output DDSs A Survey of The State of The ArtDocument9 pagesSine Output DDSs A Survey of The State of The ArtTiagoNo ratings yet
- TDC SSCL FinalDocument4 pagesTDC SSCL FinalRohish Kumar Reddy mittaNo ratings yet
- CS EXPERIMENT 11 01012021 095140am 18012021 012709amDocument13 pagesCS EXPERIMENT 11 01012021 095140am 18012021 012709amAsif AliNo ratings yet
- Lecture03 Ee620 PLL SystemDocument128 pagesLecture03 Ee620 PLL SystemPeygamberinizi SikiyimNo ratings yet
- Digital PC To TV Encoder: Features General DescriptionDocument50 pagesDigital PC To TV Encoder: Features General DescriptionQuiteNo ratings yet
- Low Power Vlsi Design 2Document70 pagesLow Power Vlsi Design 2Rajesh PylaNo ratings yet
- Elmore Delay, Logical EffortDocument47 pagesElmore Delay, Logical EffortAtul YadavNo ratings yet
- TC 500/a/510/514Document34 pagesTC 500/a/510/514laghmiNo ratings yet
- Datasheet of TDA8703Document19 pagesDatasheet of TDA8703Станислав ИвановNo ratings yet
- Electronics: A Fast Transient Response Digital LDO With A TDC-Based Signal ConverterDocument13 pagesElectronics: A Fast Transient Response Digital LDO With A TDC-Based Signal Converterchandan choudharyNo ratings yet
- Low PowerDocument67 pagesLow PowerRajesh PylaNo ratings yet
- Vlsi Design & TechnolgyDocument60 pagesVlsi Design & TechnolgyDimple GalaNo ratings yet
- ECNG4302 SlideSet 6 PDFDocument8 pagesECNG4302 SlideSet 6 PDFMohammed ElsayedNo ratings yet
- Adc 23.12.22Document83 pagesAdc 23.12.22Mrs.S.Divya BMENo ratings yet
- High Resolution Digital-To-Time Converter For Low Jitter Digital PllsDocument4 pagesHigh Resolution Digital-To-Time Converter For Low Jitter Digital PllsroomaNo ratings yet
- Ab1e2282cb851c3 Ek ImportantDocument5 pagesAb1e2282cb851c3 Ek ImportantulaganathanNo ratings yet
- Digital Phase Lock LoopsDocument17 pagesDigital Phase Lock LoopsArfaaNaseemNo ratings yet
- A Low Power Vernier Time-To-digitalDocument5 pagesA Low Power Vernier Time-To-digitalLaxmi KumreNo ratings yet
- High Speed Digital CircuitsDocument60 pagesHigh Speed Digital Circuits16117 GOURAB SAHANo ratings yet
- ECEN720: High-Speed Links Circuits and Systems Spring 2019: Lecture 10: JitterDocument26 pagesECEN720: High-Speed Links Circuits and Systems Spring 2019: Lecture 10: JitterSreekanth SomanNo ratings yet
- Design of A 24 GHZ Programmable Frequency DividerDocument8 pagesDesign of A 24 GHZ Programmable Frequency DividerHagar IlbheryNo ratings yet
- PID ControlDocument56 pagesPID ControlSyafRizal100% (1)
- Answers To Example Exam 1 Spring 2018Document12 pagesAnswers To Example Exam 1 Spring 2018Sirish OrugantiNo ratings yet
- PorteDocument34 pagesPortePeacson AdamadouNo ratings yet
- Lecture11 Registers CountersDocument4 pagesLecture11 Registers CounterssheheryarNo ratings yet
- A 1.6-To-3.0-GHz Fractional-N MDLL With A Digital-To-Time Converter Range-Reduction Technique Achieving 397fs Jitter at 2.5-MW PowerDocument4 pagesA 1.6-To-3.0-GHz Fractional-N MDLL With A Digital-To-Time Converter Range-Reduction Technique Achieving 397fs Jitter at 2.5-MW PowerSuyog DhakneNo ratings yet
- NE5034Document6 pagesNE5034teguh.setionoNo ratings yet
- Electronic SwitchingDocument36 pagesElectronic Switchingtejpal88No ratings yet
- Digital Integrated Circuits: A Design PerspectiveDocument78 pagesDigital Integrated Circuits: A Design Perspectiveapi-127299018No ratings yet
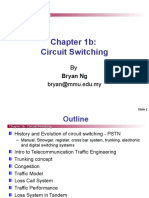
- Chapter 1b: Circuit Switching: ETM 7012 Transmission & Switching: SwitchingDocument45 pagesChapter 1b: Circuit Switching: ETM 7012 Transmission & Switching: Switchingkhaled loteesNo ratings yet
- SMC AR2014 cd11Document78 pagesSMC AR2014 cd11Jerelleen RodriguezNo ratings yet
- Honeywell 4219 Install GuideDocument2 pagesHoneywell 4219 Install GuideAlarm Grid Home Security and Alarm MonitoringNo ratings yet
- Acid Base Tit RationsDocument2 pagesAcid Base Tit RationsIra MunirahNo ratings yet
- Manual de Partes Thmig 500Document3 pagesManual de Partes Thmig 500Alexander HernandezNo ratings yet
- The Doha Development Round or Doha Development AgendaDocument8 pagesThe Doha Development Round or Doha Development AgendaDurlov AdnanNo ratings yet
- Designing An Ideal Operating Room Complex.5Document7 pagesDesigning An Ideal Operating Room Complex.5panda kohtetNo ratings yet
- SLEEPING BEAUTY - Narrative TextDocument6 pagesSLEEPING BEAUTY - Narrative TextPande AdnyanaNo ratings yet
- Chapter 1 Basic Design ConsiderationDocument38 pagesChapter 1 Basic Design ConsiderationAce ThunderNo ratings yet
- Potts DiseaseDocument8 pagesPotts Diseaseaimeeros0% (2)
- Multiinstrument: With Control and Protection Device For Genset Unit TYPE SPG-120/20Document2 pagesMultiinstrument: With Control and Protection Device For Genset Unit TYPE SPG-120/20Ya ŞamNo ratings yet
- Muhammad Hamza (Civil)Document3 pagesMuhammad Hamza (Civil)smazNo ratings yet
- A Guide For Expanded Restaurant + Retail SpaceDocument7 pagesA Guide For Expanded Restaurant + Retail SpaceWWMTNo ratings yet
- 2019 Executive Tentative Budget For Dutchess CountyDocument888 pages2019 Executive Tentative Budget For Dutchess CountyDaily FreemanNo ratings yet
- GASBRAYTONDocument16 pagesGASBRAYTONJohnCris B. FornilosNo ratings yet
- Mental Status ExaminationDocument8 pagesMental Status ExaminationanisaNo ratings yet
- A Study On Sale and Distribution Management of Hindustan Unilever LimitedDocument35 pagesA Study On Sale and Distribution Management of Hindustan Unilever LimitedJakir HussainNo ratings yet
- Cracks: Types of Cracks Repairing TechniquesDocument13 pagesCracks: Types of Cracks Repairing TechniquesAli Zain Ul AbadeenNo ratings yet
- STRATAFIX Portfolio For Robotic Surgery BrochureDocument12 pagesSTRATAFIX Portfolio For Robotic Surgery BrochureRodrigo AlencarNo ratings yet
- Molecular Etiopathogenesis of Ameloblastoma CurrentDocument5 pagesMolecular Etiopathogenesis of Ameloblastoma CurrentRiskha Febriani HapsariNo ratings yet
- XB-1000 Service Manual New PDFDocument21 pagesXB-1000 Service Manual New PDFMuhammad KhizarNo ratings yet
- Method Statement For Underground ELV Cable Laying WorkDocument2 pagesMethod Statement For Underground ELV Cable Laying WorkYe Yint60% (5)
- Cosmetics Lab - Group 1 - Report 2Document10 pagesCosmetics Lab - Group 1 - Report 2Lê PhúcNo ratings yet
- MAPEH 10 PE L1 With BlanksDocument2 pagesMAPEH 10 PE L1 With BlankshaynaxNo ratings yet
- 10.1515 - CCLM 2023 7044Document112 pages10.1515 - CCLM 2023 7044sfendri17No ratings yet
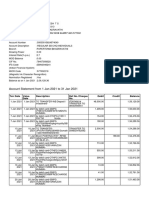
- Account Statement From 1 Jan 2021 To 31 Jan 2021: TXN Date Value Date Description Ref No./Cheque No. Debit Credit BalanceDocument2 pagesAccount Statement From 1 Jan 2021 To 31 Jan 2021: TXN Date Value Date Description Ref No./Cheque No. Debit Credit BalancevenkNo ratings yet
- Internal Audit ProcedureDocument6 pagesInternal Audit ProcedureUsaid KhanNo ratings yet
- Drilling: Precise Drilling With Electron BeamsDocument4 pagesDrilling: Precise Drilling With Electron BeamsAleksandarIvankovićNo ratings yet