You might also like
- Electrical Machines: Lecture Notes for Electrical Machines CourseFrom EverandElectrical Machines: Lecture Notes for Electrical Machines CourseNo ratings yet
- 4hk1xygd04 DGK100D PDFDocument57 pages4hk1xygd04 DGK100D PDFAhmed El-AdawyNo ratings yet
- Electric Motor Control: DC, AC, and BLDC MotorsFrom EverandElectric Motor Control: DC, AC, and BLDC MotorsRating: 4.5 out of 5 stars4.5/5 (19)
- Digital Control of A Three Phase Induction MotorDocument60 pagesDigital Control of A Three Phase Induction MotorKeshavamurthy MurthyNo ratings yet
- Synchronous Generator Modeling Using MatlabDocument6 pagesSynchronous Generator Modeling Using MatlabJennifer AndersonNo ratings yet
- Comments On DrawingsDocument8 pagesComments On Drawingsmdalt77No ratings yet
- Power Electronics and Electric Drives for Traction ApplicationsFrom EverandPower Electronics and Electric Drives for Traction ApplicationsNo ratings yet
- Testing of BushingDocument8 pagesTesting of BushingAmir Ali khanNo ratings yet
- DorkDocument14 pagesDorkFred Wilpen100% (1)
- Practical Power Quality Charts For Motor Starting AssessmentDocument10 pagesPractical Power Quality Charts For Motor Starting AssessmentJAMESJANUSGENIUS5678100% (1)
- AxiDocument12 pagesAxiganapathiNo ratings yet
- Project Management PlanDocument114 pagesProject Management PlanसागरऊमळकरNo ratings yet
- AC Electric Motors Control: Advanced Design Techniques and ApplicationsFrom EverandAC Electric Motors Control: Advanced Design Techniques and ApplicationsFouad GiriNo ratings yet
- Fidic International ContractsDocument8 pagesFidic International Contractslinus@len.co.idNo ratings yet
- Name of Office: Project Proposal (Gad) : Schools Division of ZambalesDocument1 pageName of Office: Project Proposal (Gad) : Schools Division of ZambalesAnne Labio EvangelistaNo ratings yet
- Transient Motor Starting Lab SheetDocument28 pagesTransient Motor Starting Lab SheetZamNo ratings yet
- Modelling and Simulation of DC-Motor Electric Drive Control System With Variable Moment of InertiaDocument6 pagesModelling and Simulation of DC-Motor Electric Drive Control System With Variable Moment of InertiaIDESNo ratings yet
- Performance Characteristics of InductionDocument48 pagesPerformance Characteristics of InductionToolit MartineNo ratings yet
- Contoh ETAP 2Document6 pagesContoh ETAP 2Ken Rama AdityoNo ratings yet
- Matlab Simulation of An Induction Motor Using Simuling by MagximDocument77 pagesMatlab Simulation of An Induction Motor Using Simuling by MagximMaximilian SylvesterNo ratings yet
- Specijalni Elektrici MasiniDocument22 pagesSpecijalni Elektrici MasiniIgor JovanovskiNo ratings yet
- Mathematical Modeling and Speed Torque Analysis of Three Phase Squirrel Cage Induction Motor Using Matlab Simulink For Electrical Machines LaboratoryDocument10 pagesMathematical Modeling and Speed Torque Analysis of Three Phase Squirrel Cage Induction Motor Using Matlab Simulink For Electrical Machines LaboratoryjhonnydesaNo ratings yet
- DC MotorDocument5 pagesDC Motorjiwani87No ratings yet
- EEE 1206 011 Direct Quadrate Modeling Induction Motor MatLab Simulink PDFDocument7 pagesEEE 1206 011 Direct Quadrate Modeling Induction Motor MatLab Simulink PDFFiaz KhanNo ratings yet
- Effect of Temperature Rise On The Performance of Induction MotorsDocument2 pagesEffect of Temperature Rise On The Performance of Induction Motorsud54No ratings yet
- Mathematical Modeling and Analysis of Different VeDocument13 pagesMathematical Modeling and Analysis of Different Veramadhanifarahum19No ratings yet
- Pembangkitan Energi ListrikDocument5 pagesPembangkitan Energi ListrikDanang TriNo ratings yet
- AC Machines Lab. Experiment No.1: University Electronics Engineering College Systems and Control DepDocument5 pagesAC Machines Lab. Experiment No.1: University Electronics Engineering College Systems and Control DepQusai JamalNo ratings yet
- Soft-Started Induction Motor Modeling and Heating Issues For DiffDocument19 pagesSoft-Started Induction Motor Modeling and Heating Issues For DiffJunior ARAGÃONo ratings yet
- Modelling and Analysis of Induction Motor Using LabviewDocument11 pagesModelling and Analysis of Induction Motor Using LabviewNituNo ratings yet
- A MATLAB/Simulink Model of A Self Excited Induction Generator For An Electrical Brake ApplicationDocument5 pagesA MATLAB/Simulink Model of A Self Excited Induction Generator For An Electrical Brake ApplicationbeeshamNo ratings yet
- Identification and Optimization Speed Control of BLDC Motor Using Fuzzy Logic ControllerDocument5 pagesIdentification and Optimization Speed Control of BLDC Motor Using Fuzzy Logic ControllerJurgen CokuNo ratings yet
- Engrmece3350u Lab Handbook f2014Document52 pagesEngrmece3350u Lab Handbook f2014Bob LeeNo ratings yet
- Parameters Identification of Induction Motor Model BasedDocument10 pagesParameters Identification of Induction Motor Model Basedretrueke1170No ratings yet
- Induction Motor ExperimentsDocument24 pagesInduction Motor ExperimentsJhunnel MaganesNo ratings yet
- EEE363 (Exp 7) Study of The Starting Characteristics and Torque Speed Relationship of Three Phase Synchronous MotorDocument6 pagesEEE363 (Exp 7) Study of The Starting Characteristics and Torque Speed Relationship of Three Phase Synchronous Motorsalad.ass420420No ratings yet
- Effects of Voltage Sag Due To Starting of Induction Motor-Ed2Document14 pagesEffects of Voltage Sag Due To Starting of Induction Motor-Ed2Mohd Amzary JamaludinNo ratings yet
- On The Determination of Induction Motor Parameters From Manufacturer Data ForDocument10 pagesOn The Determination of Induction Motor Parameters From Manufacturer Data ForjosegirotaicNo ratings yet
- Parameter Identification and Comparision of An Induction Motor ModelsDocument11 pagesParameter Identification and Comparision of An Induction Motor ModelsJUAN4201No ratings yet
- PSMS Lab ManualDocument42 pagesPSMS Lab ManualIrfan Ali100% (1)
- Solution Manual For Todays Technician Automotive Electricity and Electronics Classroom and Shop Manual Pack 6th EditionDocument9 pagesSolution Manual For Todays Technician Automotive Electricity and Electronics Classroom and Shop Manual Pack 6th EditionPaulPaynermyd100% (34)
- Classification of LimDocument4 pagesClassification of LimAnkita DwivediNo ratings yet
- Submitted To: Dr. Tushar Kanti Roy Associate Professor Dept. of ETE, RUET Submitted By: Name: Aminur Rahman Bahar Roll: 1704033 Year: 3 Year (ODD) Submission Date: 23-08-21Document4 pagesSubmitted To: Dr. Tushar Kanti Roy Associate Professor Dept. of ETE, RUET Submitted By: Name: Aminur Rahman Bahar Roll: 1704033 Year: 3 Year (ODD) Submission Date: 23-08-21mbchNo ratings yet
- 5087 4839 1 PB PDFDocument9 pages5087 4839 1 PB PDFPranjali patilNo ratings yet
- Speed Control of Three Phase Induction Motor ThesisDocument6 pagesSpeed Control of Three Phase Induction Motor Thesismoniquedaviswashington100% (2)
- IptDocument44 pagesIptrupaNo ratings yet
- Machine Mannual - 2Document84 pagesMachine Mannual - 2Aqib SaeedNo ratings yet
- Speed Control of Three Phase Induction MotorDocument8 pagesSpeed Control of Three Phase Induction MotorsasNo ratings yet
- Labview Simulation of Induction Motors: Zhaoxian Zhou and James Matthew JohnsonDocument8 pagesLabview Simulation of Induction Motors: Zhaoxian Zhou and James Matthew JohnsonR Sathish Kumar KumarNo ratings yet
- Project PDFDocument43 pagesProject PDFtaddese bekele100% (6)
- Etd Lab3Document10 pagesEtd Lab3Isaya KawanaNo ratings yet
- Mathematical Model of AsynchronousDocument5 pagesMathematical Model of AsynchronousChandra ShekarNo ratings yet
- 10 5923 J Eee 20110102 14Document8 pages10 5923 J Eee 20110102 14clide_050793No ratings yet
- Jurnal Motor Listrik AcDocument8 pagesJurnal Motor Listrik AcnadyawjyNo ratings yet
- Electircal Machine-2 ManualDocument38 pagesElectircal Machine-2 ManualSualé SualéNo ratings yet
- Speed Control of Induction Motor ThesisDocument6 pagesSpeed Control of Induction Motor Thesislynakavojos3100% (2)
- Transient Stability Analysis Using MiPowerDocument5 pagesTransient Stability Analysis Using MiPowerBhavik Prajapati100% (1)
- The Performance Analyses of An Induction Motor Due To Specified Fault ConditionsDocument5 pagesThe Performance Analyses of An Induction Motor Due To Specified Fault ConditionsyugendraraoknNo ratings yet
- Field Oriented Control of Ac Motor - ReportDocument9 pagesField Oriented Control of Ac Motor - ReportKesri Nath TiwariNo ratings yet
- Evaluation of The Transient Response of A DC MotorDocument6 pagesEvaluation of The Transient Response of A DC MotorNesuh MalangNo ratings yet
- Bahçeşehir University: 111equation Chapter 1 Section 1212equation Chapter 2 Section 1Document10 pagesBahçeşehir University: 111equation Chapter 1 Section 1212equation Chapter 2 Section 1Wael M. AbulafiNo ratings yet
- Salimin2013 PDFDocument5 pagesSalimin2013 PDFAhmad RobbyNo ratings yet
- Simulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorFrom EverandSimulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorNo ratings yet
- Model Predictive Control of High Power Converters and Industrial DrivesFrom EverandModel Predictive Control of High Power Converters and Industrial DrivesNo ratings yet
- ConvertDocument71 pagesConvertJohn Robinson Carvajal AcuñaNo ratings yet
- Air-Conditioning and Refrigeration Certification Programs, Eurovent CertificationDocument2 pagesAir-Conditioning and Refrigeration Certification Programs, Eurovent CertificationAngel_AyalaNo ratings yet
- HI-8585, HI-8586: Description Pin ConfigurationDocument9 pagesHI-8585, HI-8586: Description Pin ConfigurationVasya PetrovaNo ratings yet
- Employee Employer Relationship of Square Pharmaceuticals Bangladesh LimitedDocument20 pagesEmployee Employer Relationship of Square Pharmaceuticals Bangladesh LimitedAlrazi ArmanNo ratings yet
- Sample Weekly Lesson PlanDocument2 pagesSample Weekly Lesson PlanGRACE ANN EDRADANNo ratings yet
- Válvula 3 Vías. MPF PDFDocument4 pagesVálvula 3 Vías. MPF PDFBelen de la TorreNo ratings yet
- 351 - 27435 - EE411 - 2015 - 1 - 1 - 1 - 0 3 EE411 Lec6,7 Compensation RLDocument47 pages351 - 27435 - EE411 - 2015 - 1 - 1 - 1 - 0 3 EE411 Lec6,7 Compensation RLMohamed SaeedNo ratings yet
- CS5212 Critique1Document5 pagesCS5212 Critique1kkoothaNo ratings yet
- Royal EnfieldDocument18 pagesRoyal Enfieldram prasad das100% (1)
- Michael Jeffrey Jordan (Born February 17, 1963), Also Known by His Initials, MJDocument1 pageMichael Jeffrey Jordan (Born February 17, 1963), Also Known by His Initials, MJDana TimushNo ratings yet
- Material Safety Data Sheet: SALP Double Acting Baking Powder (Item 112812) Section I - IdentificationDocument2 pagesMaterial Safety Data Sheet: SALP Double Acting Baking Powder (Item 112812) Section I - IdentificationDidier GómezNo ratings yet
- PAPR Reduction Using Tone Reservation Method in OFDM SignalDocument7 pagesPAPR Reduction Using Tone Reservation Method in OFDM SignalInternational Journal of Advanced Scientific Research and DevelopmentNo ratings yet
- Ielts Writing Correction-Da ThaoDocument3 pagesIelts Writing Correction-Da ThaoRose GreenNo ratings yet
- Mid 128 Pid435Document1 pageMid 128 Pid435Preett Rajin MenabungNo ratings yet
- Absolute Sale - Dumapit To ZernaDocument3 pagesAbsolute Sale - Dumapit To ZernaMegan HerreraNo ratings yet
- Altronics AGV5 SRVC MNL 11-2003 PDFDocument18 pagesAltronics AGV5 SRVC MNL 11-2003 PDFSMcNo ratings yet
- Part 1-Dietary Analysis AssignmentDocument2 pagesPart 1-Dietary Analysis AssignmentHira NasirNo ratings yet
- 2L4H 1.5m TQBM-7014 9015 182017 252718 D172718DEI-65FT2 PDFDocument1 page2L4H 1.5m TQBM-7014 9015 182017 252718 D172718DEI-65FT2 PDFTolga MesepinarNo ratings yet
- Excelitas C30902SH-DTC Si APD DatasheetDocument14 pagesExcelitas C30902SH-DTC Si APD DatasheetBabak ZamaanieNo ratings yet
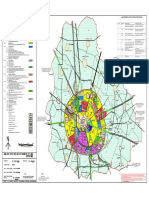
- Jhajjar Master PlanDocument1 pageJhajjar Master PlanMayank AhujaNo ratings yet
- Super EgoDocument40 pagesSuper Egolong_kongoNo ratings yet
- Effect of Post Weld Heat Treatment On The Oxide Scaling of Cr-Mo Steel WeldmentsDocument7 pagesEffect of Post Weld Heat Treatment On The Oxide Scaling of Cr-Mo Steel WeldmentsFebriant SchweinsteigerNo ratings yet