You might also like
- Chương 1: Giới Thiệu Chung Về Vi Xử Lý - Vi Điều KhiểnDocument13 pagesChương 1: Giới Thiệu Chung Về Vi Xử Lý - Vi Điều KhiểnHa SunNo ratings yet
- 3 Phieu Giao Bai Tap Ve Nha IHW#I.5Document3 pages3 Phieu Giao Bai Tap Ve Nha IHW#I.5Nhân Phan TríNo ratings yet
- TMe-STM32-ETH Manual PDFDocument11 pagesTMe-STM32-ETH Manual PDFMạnh NguyễnNo ratings yet
- Đồ án Thiết kế mạch mô phỏng đo và hiển thị tốc độ động cơ có gắn Encoder 100 xungvòng khoảng đo 0 2500 vòngphútDocument21 pagesĐồ án Thiết kế mạch mô phỏng đo và hiển thị tốc độ động cơ có gắn Encoder 100 xungvòng khoảng đo 0 2500 vòngphútNguyễn HoàngNo ratings yet
- DeHK2_16_17_CQDocument3 pagesDeHK2_16_17_CQQUỐC TRƯƠNG NGỌC BẢONo ratings yet
- VDK01 - Tong Quan (ThangTV)Document12 pagesVDK01 - Tong Quan (ThangTV)Huỳnh Quang KhôiNo ratings yet
- 2022 VXLDocument21 pages2022 VXLKhánh TrọngNo ratings yet
- VDK01 - Tong Quan (ThangTV)Document26 pagesVDK01 - Tong Quan (ThangTV)0856PhanThanh TùngNo ratings yet
- Lab#i9.1Document2 pagesLab#i9.1Trí ThanhNo ratings yet
- Các Chuẩn Truyền Thông Thông DụngDocument9 pagesCác Chuẩn Truyền Thông Thông Dụng0375Nguyễn Gia HuyNo ratings yet
- VDK01 Tong Quan ThangTV Pages 2 201 381 33Document90 pagesVDK01 Tong Quan ThangTV Pages 2 201 381 33Lê Nguyễn Anh ThảoNo ratings yet
- MidHK1 2013 2014Document3 pagesMidHK1 2013 2014HUY LÝ GIANo ratings yet
- Baocaobai 4Document18 pagesBaocaobai 4Heo SuaNo ratings yet
- Vi Dieu Khien 1Document22 pagesVi Dieu Khien 10375Nguyễn Gia HuyNo ratings yet
- Tran Quoc Tuan _2231030201Document9 pagesTran Quoc Tuan _2231030201voanhkiem.32No ratings yet
- Mẫu Bai Tap Lon VXL Thuyet MinhDocument15 pagesMẫu Bai Tap Lon VXL Thuyet MinhSsss ĐứcNo ratings yet
- Chương 3 Vi X LýDocument4 pagesChương 3 Vi X LýĐoàn Minh DũngNo ratings yet
- Lap Trinh He Thong Nhung Bui Quoc Bao Hk1 2013 2014 [Cuuduongthancong.com]Document2 pagesLap Trinh He Thong Nhung Bui Quoc Bao Hk1 2013 2014 [Cuuduongthancong.com]Đinh HoàngNo ratings yet
- Do Nhiet Lm335Document2 pagesDo Nhiet Lm335mrthoongNo ratings yet
- Bai 1 TH VXLtrDL&DKDocument7 pagesBai 1 TH VXLtrDL&DKquanglam071001No ratings yet
- BTVXL Chuong3Document12 pagesBTVXL Chuong3Trịnh Quốc ThànhNo ratings yet
- Esd-Cuoi-Ky-2016-2017-Hk1-Cq-Dapan - (Cuuduongthancong - Com)Document9 pagesEsd-Cuoi-Ky-2016-2017-Hk1-Cq-Dapan - (Cuuduongthancong - Com)Đức Huy LưuNo ratings yet
- Đ Án Báo CáoDocument11 pagesĐ Án Báo CáoAnh DuyNo ratings yet
- (Pic 16f877a Tu de Den Kho) Utf-8''TUT01.03.PVN - NTCRDocument14 pages(Pic 16f877a Tu de Den Kho) Utf-8''TUT01.03.PVN - NTCRapi-3714448No ratings yet
- CHNG I Gii Thiu V VDK 89C51Document67 pagesCHNG I Gii Thiu V VDK 89C51Bí LíNo ratings yet
- Bài tậpDocument31 pagesBài tậplamvantrongphuc.2021No ratings yet
- ESD Cuoi Ky 2018 2019 HK2 CQDocument6 pagesESD Cuoi Ky 2018 2019 HK2 CQpoyoung95No ratings yet
- Bai Tap HTNDocument8 pagesBai Tap HTNchibao laiNo ratings yet
- Lab#i7.1Document3 pagesLab#i7.1Vanh AnhNo ratings yet
- C3-So Do Va Nguyen Ly Hoat DongDocument7 pagesC3-So Do Va Nguyen Ly Hoat DongPhiPhiNo ratings yet
- IHW#3Document7 pagesIHW#3Trí ThanhNo ratings yet
- Bai 1 - He Thong Dieu Khien Led Đơn, Led 7 Đo NDocument38 pagesBai 1 - He Thong Dieu Khien Led Đơn, Led 7 Đo Nkhánh trần minhNo ratings yet
- Lớp Chính quy VP - Ngày 5/4/2019 Môn thi: THIẾT KẾ HỆ THỐNG NHÚNG - Thời gian: 60 phútDocument4 pagesLớp Chính quy VP - Ngày 5/4/2019 Môn thi: THIẾT KẾ HỆ THỐNG NHÚNG - Thời gian: 60 phútĐỗ Đại HọcNo ratings yet
- ESD Cuoi Ky 2021 2022 HK1 CQ Final DapanDocument7 pagesESD Cuoi Ky 2021 2022 HK1 CQ Final DapanHoàng HuyNo ratings yet
- SLIDE 2 - 2 - Bai4 LapTrinhNhanBietNutNhanDocument14 pagesSLIDE 2 - 2 - Bai4 LapTrinhNhanBietNutNhanHUY PHAMNo ratings yet
- Slide 4 - 2 - Bai8 LedmatrixDocument16 pagesSlide 4 - 2 - Bai8 LedmatrixLong BuifNo ratings yet
- Giới thiệu phần cứng bộ điều khiển dùng STM32Document3 pagesGiới thiệu phần cứng bộ điều khiển dùng STM32Trung Võ Lê MinhNo ratings yet
- Kiểm Tra 50 Phut ST2 T1 3Document2 pagesKiểm Tra 50 Phut ST2 T1 3Nhật Lâm Xuân MinhNo ratings yet
- Adc & PWM (ADC: Analog To Digital Converter PWM: Pulse Width Modulation)Document18 pagesAdc & PWM (ADC: Analog To Digital Converter PWM: Pulse Width Modulation)0375Nguyễn Gia HuyNo ratings yet
- TrƯỜng ĐẠi hỌc TrÀ VinhDocument67 pagesTrƯỜng ĐẠi hỌc TrÀ VinhtruongnguyentinNo ratings yet
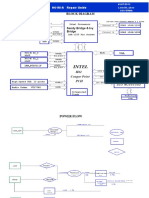
- Asus h61m (Repair Guide)Document6 pagesAsus h61m (Repair Guide)Toàn PhạmNo ratings yet
- (123doc) - Do-An-Vi-Xu-Ly-Msp430-So-BoDocument17 pages(123doc) - Do-An-Vi-Xu-Ly-Msp430-So-BoTô Minh Đạt100% (1)
- BAI TAP LON (Lap Trinh C Ung Dung)Document6 pagesBAI TAP LON (Lap Trinh C Ung Dung)12. Phạm Quang LinhNo ratings yet
- PicKit2SE UserManualDocument8 pagesPicKit2SE UserManualtonybinh2011No ratings yet
- Cho sơ đồ mạch như hình 1, sinh viên thực hiện các yêu cầu sau: CÂU 1: (3đ)Document2 pagesCho sơ đồ mạch như hình 1, sinh viên thực hiện các yêu cầu sau: CÂU 1: (3đ)0375Nguyễn Gia HuyNo ratings yet

















![Lap Trinh He Thong Nhung Bui Quoc Bao Hk1 2013 2014 [Cuuduongthancong.com]](https://imgv2-1-f.scribdassets.com/img/document/734919612/149x198/d0d8f7c3c0/1716349412?v=1)