10/31/2023
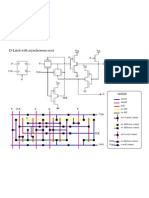
Introduction to RTL, High-Level State Machines,
RTL Design Process
Introduction outputs
inputs
bi bo
FSM
FSM
• Controllers Combinational
– Control input/output: single bit (or just a logic n1
few) representing event or state n0
s1 s0
– Finite-state machine describes
State register
behavior; implemented as state register clk
and combinational logic
• Datapath components
– Data input/output: Multiple bits Register Comparator
collectively representing single entity si
– Datapath components included sians
Register file
registers, adders, ALU, comparators, ALU
register files, etc.
bi bo
• This chapter: custom processors
e
Combinational Register file
– Processor: Controller and datapath logic n1
components working together to n0
s1 s0 ALU
implement an algorithm
State register
Datapath
Controller 2
1
� 10/31/2023
RTL Design: Capture Behavior, Convert to Circuit
• Recall
– Combinational Logic Design
• First step: Capture behavior (using equation
or truth table)
• Remaining steps: Convert to circuit
Capture behavior
– Sequential Logic Design
• First step: Capture behavior (using FSM)
• Remaining steps: Convert to circuit
• RTL Design (the method for creating
Convert to circuit
custom processors)
– First step: Capture behavior (using high-
level state machine, to be introduced)
– Remaining steps: Convert to circuit
RTL Design
High-Level State Machines (HLSMs)
Some behaviors too complex for
equations, truth tables, or FSMs s a
Ex: Soda dispenser
c: bit input, 1 when coin deposited
c Soda
a: 8-bit input having value of deposited coin
d dispenser
s: 8-bit input having cost of a soda processor
d: bit output, processor sets to 1 when total
value of deposited coins equals or exceeds
cost of a soda
FSM can’t represent…
s a 25
8-bit input/output
Storage of current total 25
50
Addition (e.g., 25 + 10) 0 1 0 1 0
c Soda
d dispenser tot:
tot:50
25
0 1 0 processor a
2
� 10/31/2023
RTL Design
HLSMs
s a
High-level state machine (HLSM) 8 8
extends FSM with:
Multi-bit input/output c Soda
dispenser
Local storage d
processor
Arithmetic operations
Inputs: c (bit), a (8 bits), s (8 bits)
Conventions Outputs: d (bit) // '1' dispenses soda
Numbers: Local storage: tot (8 bits)
Single-bit: '0' (single quotes) c
Integer: 0 (no quotes) Add
Multi-bit: “0000” (double quotes) Init Wait
tot:=tot+a
== for equal, := for assignment
a
d:='0' c’ * (tot<s)
Multi-bit outputs must be registered via tot:=0 c’*(tot<s)’
local storage Disp
// precedes a comment
SodaDispenser d:='1'
RTL Design
Ex: Cycles-High Counter
P = total number (in binary) of cycles that m is 1 CountHigh
m
Capture behavior as HLSM clk Preg
Preg required (multibit outputs must be registered) 32
Use to hold count P
CountHigh Inputs: m (bit) CountHigh Inputs: m (bit) CountHigh Inputs: m (bit)
Outputs: P (32 bits) Outputs: P (32 bits) Outputs: P (32 bits)
Local storage: Preg Local storage: Preg Local storage: Preg
S_Clr // Clear Preg to 0s S_Clr // Clear Preg to 0s S_Clr
// Clear Preg to 0s
Preg := 0 Preg := 0 Preg := 0
a
? m' // Wait for m == '1' m' // Wait for m == '1'
S_Wt S_Wt
m m' m
? // Increment Preg
m S_Inc Preg := Preg + 1
(a) (b) (c)
a
6
3
� 10/31/2023
RTL Design
Example: Laser-Based Distance Measurer
T (in seconds)
laser
D
Object of
a
interest
sensor
2D = T sec * 3*108 m/sec
Laser-based distance measurement – pulse laser, measure time T to sense
reflection
8
Laser light travels at speed of light, 3*10 m/sec
8
Distance is thus D = (T sec * 3*10 m/sec) / 2
RTL Design
Example: Laser-Based Distance Measurer
T (in seconds)
B L
laser from button to laser
Laser-based
distance
sensor D 16 measurer S
to display from sensor
Inputs/outputs
B: bit input, from button, to begin measurement
L: bit output, activates laser
S: bit input, senses laser reflection
D: 16-bit output, to display computed distance
4
� 10/31/2023
RTL Design
Example: Laser-Based Distance Measurer
DistanceMeasurer B Laser-based L
Inputs : B (bit), S (bit) 16 distance measurer
Outputs : L (bit), D (16 bits) D S
Local storage: Dreg(16)
a
S0 ?
(first state usually
L := '0' // laser off initializes the system)
Dreg := 0 // distance is 0
Declare inputs, outputs, and local storage
Dreg required for multi-bit output
Create initial state, name it S0
Initialize laser to off (L:='0')
Initialize displayed distance to 0 (Dreg:=0)
Recall: '0' means single bit, 0
means integer
9
RTL Design
Example: Laser-Based Distance Measurer
B Laser-based L
DistanceMeasurer
16 distance measurer
... B' // button not pressed D S
S0 S1 ?
B
L := '0' // button
Dreg := 0 pressed
Add another state, S1, that waits for a button press
B' – stay in S1, keep waiting
B – go to a new state S2 Q: What should S2 do?
A: Turn on the laser
10
5
� 10/31/2023
RTL Design
Example: Laser-Based Distance Measurer
B Laser-based L
16 distance measurer
DistanceMeasurer D S
... B'
S0 S1 S2 S3
B
L := '0' L := '1' L := '0'
Dreg := 0 // laser on // laser off
Add a state S2 that turns on the laser (L:='1')
Then turn off laser (L:='0') in a state S3
Q: What do next?
a
A: Start timer, wait to sense reflection
11
RTL Design
Example: Laser-Based Distance Measurer
DistanceMeasurer Inputs : B (bit), S (bit) Outputs : L (bit), D (16 bits) B Laser-based L
Local storage: Dreg, Dctr (16 bits) 16 distance measurer
B' S' // no reflection D S
S // reflection
S0 S1 S2 S3 ?
B
L := '0' Dctr := 0 L := '1' L := '0'
Dreg := 0 // reset cycle Dctr := Dctr + 1
count // count cycles
a
Stay in S3 until sense reflection (S)
To measure time, count cycles while in S3
To count, declare local storage Dctr
Initialize Dctr to 0 in S1. In S2 would have been O.K. too.
Don't forget to initialize local storage—common mistake
Increment Dctr each cycle in S3
12
6
� 10/31/2023
RTL Design
Example: Laser-Based Distance Measurer
DistanceMeasurer Inputs : B (bit), S (bit) Outputs : L (bit), D (16 bits) B Laser-based L
Local storage: Dreg, Dctr (16 bits) 16 distance measurer
D S
B' S'
S0 S1 S2 S3 S4
B S
L := '0' Dctr := 0 L := '1' L := '0' Dreg := Dctr/2
Dreg := 0 Dctr := Dctr+1 // calculate D
Once reflection detected (S), go to new state S4
Calculate distance
8
Assuming clock frequency is 3x10 , Dctr holds number of meters, so Dreg:=Dctr/2
After S4, go back to S1 to wait for button again
13