You might also like
- CKM 200 Car Key Master ManualDocument33 pagesCKM 200 Car Key Master Manualselereak100% (1)
- 34 Ms Surgery LogbookDocument111 pages34 Ms Surgery LogbookMohamedHossam50% (2)
- Crude Oil Degradation by MicroorganismsDocument19 pagesCrude Oil Degradation by MicroorganismsaziskfNo ratings yet
- 40-08591-01 TWS FL-8 User Manual PDFDocument181 pages40-08591-01 TWS FL-8 User Manual PDFngocanhvyNo ratings yet
- Interview For QualcommDocument3 pagesInterview For QualcommPratikshaKhade0% (1)
- Science-9 q1 w1 Mod1 Adm-1Document62 pagesScience-9 q1 w1 Mod1 Adm-1Carla GabrielNo ratings yet
- API DocumentDocument5,210 pagesAPI DocumentfjlNo ratings yet
- Parallel Port Shark Project: Documentazione Raccolta Da InternetDocument78 pagesParallel Port Shark Project: Documentazione Raccolta Da InternetNata_D_Pedro_8969No ratings yet
- Proc Embarqué - Ch5Document47 pagesProc Embarqué - Ch5test testNo ratings yet
- LogicDesign 8 2Document21 pagesLogicDesign 8 2hwangmbwNo ratings yet
- Output Signal Specifications: Digimatic CodeDocument1 pageOutput Signal Specifications: Digimatic CodeOkara666No ratings yet
- I/O Port Access in Microsoft Visual C++Document4 pagesI/O Port Access in Microsoft Visual C++baruaeeeNo ratings yet
- TK Series: High Function/high Performance PID ControlDocument23 pagesTK Series: High Function/high Performance PID ControlHùng VũNo ratings yet
- Artificial Intelligence Applications in Power Systems - SlidesDocument90 pagesArtificial Intelligence Applications in Power Systems - SlidesLadla Shyam KaNo ratings yet
- Programming Embedded Systems (Microcontrolers) : What We Will SeeDocument12 pagesProgramming Embedded Systems (Microcontrolers) : What We Will SeeHadil SadokNo ratings yet
- ESSIR MapReduce For IndexingDocument86 pagesESSIR MapReduce For IndexingDerly R. OhaNo ratings yet
- Hardware Implementation of Trace Transform: Pramod K (USN: 2BV09LDE06) Under Guidence of Prof. Meena S MDocument21 pagesHardware Implementation of Trace Transform: Pramod K (USN: 2BV09LDE06) Under Guidence of Prof. Meena S MkaranampramodNo ratings yet
- Embedded System - Interfacing With 8051Document69 pagesEmbedded System - Interfacing With 8051DevashishNo ratings yet
- TLC5910 Led Driver: SLLS392 - NOVEMBER 1999Document31 pagesTLC5910 Led Driver: SLLS392 - NOVEMBER 1999Fernando Marques GarciaNo ratings yet
- The Concise LCD Data Sheet.: RS T TDocument1 pageThe Concise LCD Data Sheet.: RS T TgcbilalNo ratings yet
- TAS-321DG Data Sheet 4921220040 UK - 2014.11.24Document9 pagesTAS-321DG Data Sheet 4921220040 UK - 2014.11.24psergNo ratings yet
- Ohp Cmos 8 (H19-6-15)Document23 pagesOhp Cmos 8 (H19-6-15)K.M. ARIF-UZ-ZAMANNo ratings yet
- Embedded Basics From VTUDocument15 pagesEmbedded Basics From VTUKiran DNo ratings yet
- Introduction To THE TMS320C6000 Vliw DSP: Prof. Brian L. EvansDocument33 pagesIntroduction To THE TMS320C6000 Vliw DSP: Prof. Brian L. EvanskimoNo ratings yet
- TM1639Document18 pagesTM1639pepebarcelo73No ratings yet
- High Level Synthesis - 01 - IntroductionDocument25 pagesHigh Level Synthesis - 01 - Introductiona bNo ratings yet
- WD1772Document28 pagesWD1772alfa95139No ratings yet
- Oembase PinOut FDocument1 pageOembase PinOut FAndi DharmawanNo ratings yet
- API Mnemonic Operands Function Controllers: Es/Ex/Ss Sa/Sx/Sc Eh/SvDocument2 pagesAPI Mnemonic Operands Function Controllers: Es/Ex/Ss Sa/Sx/Sc Eh/SvChristenes AlvesNo ratings yet
- AT715 Interface SpecDocument12 pagesAT715 Interface SpecPablo Petrowitsch CrignolaNo ratings yet
- Add-On SequentialDocument3 pagesAdd-On SequentialasdNo ratings yet
- 8086 Min and Max Mode: Course Code BM 502 Microcontroller and BioelectronicsDocument42 pages8086 Min and Max Mode: Course Code BM 502 Microcontroller and BioelectronicsVeena mitraNo ratings yet
- Decision TreeDocument21 pagesDecision TreeAnkur KumarNo ratings yet
- Temp Indicator Use AT89C51Document11 pagesTemp Indicator Use AT89C51sumit_saNo ratings yet
- DLD Second Assignment (15-FEB-17)Document16 pagesDLD Second Assignment (15-FEB-17)Adil aliNo ratings yet
- Unit 2 Mcu PDFDocument12 pagesUnit 2 Mcu PDFatulNo ratings yet
- EEE 70 Advanced Topics in Logic Design: Read Before ClassDocument30 pagesEEE 70 Advanced Topics in Logic Design: Read Before ClassPraveen MeduriNo ratings yet
- Autonics Mt4w-Da-4nDocument11 pagesAutonics Mt4w-Da-4nJoc LuisNo ratings yet
- EE 459/500 - HDL Based Digital Design With Programmable Logic FSM, Asm, FSMD, AsmdDocument15 pagesEE 459/500 - HDL Based Digital Design With Programmable Logic FSM, Asm, FSMD, AsmdMushtaq sheikhNo ratings yet
- 74 Als 151Document19 pages74 Als 151Lu HoaNo ratings yet
- TAS-311DG Data Sheet 4921220038 UK - 2015.09.18Document10 pagesTAS-311DG Data Sheet 4921220038 UK - 2015.09.18psergNo ratings yet
- Shift ResisterDocument22 pagesShift ResisterDravid NagiNo ratings yet
- Lecture 5 RTL DesignDocument7 pagesLecture 5 RTL DesignMustafaNo ratings yet
- SD Lec 7Document13 pagesSD Lec 7Harsh AgarwalNo ratings yet
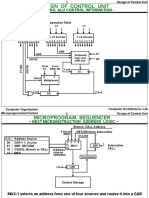
- Design of Control Unit: - Decoding Alu Control InformationDocument4 pagesDesign of Control Unit: - Decoding Alu Control InformationDawood MaNo ratings yet
- Ks0068B 16Com/60Seg Driver & Controller For Dot Matrix LCDDocument22 pagesKs0068B 16Com/60Seg Driver & Controller For Dot Matrix LCDdoragasuNo ratings yet
- COE211 CH5 Part1Document30 pagesCOE211 CH5 Part1hm100hm100hm100No ratings yet
- pjtx100 rs232Document9 pagespjtx100 rs232НиколайNo ratings yet
- Fundamentals of Digital IC Design: Haibo Wang ECE Department Southern Illinois University Carbondale, IL 62901Document29 pagesFundamentals of Digital IC Design: Haibo Wang ECE Department Southern Illinois University Carbondale, IL 62901Huzur AhmedNo ratings yet
- Lecture 2 - Verilog HDL סונ ןמור) Web siteDocument92 pagesLecture 2 - Verilog HDL סונ ןמור) Web siteMack MastNo ratings yet
- 2 Marks DpcoDocument21 pages2 Marks Dpcovarshavarsha3690No ratings yet
- Lecture 4 - Input OutputDocument45 pagesLecture 4 - Input Outputteddy tigabuNo ratings yet
- PCB Reverse EngineeringDocument29 pagesPCB Reverse EngineeringAndigan SitompulNo ratings yet
- Digital Logic Design: Register Transfer Specification & DesignDocument22 pagesDigital Logic Design: Register Transfer Specification & Designsunny louisNo ratings yet
- J dTRON 04.1 J dTRON 08.1: Compact Microprocessor ControllersDocument8 pagesJ dTRON 04.1 J dTRON 08.1: Compact Microprocessor ControllersDaneshNo ratings yet
- Modulo15b RiscV DDCArv Ch7Document26 pagesModulo15b RiscV DDCArv Ch7Gabriel BertolaziNo ratings yet
- Sine Output DDSs A Survey of The State of The ArtDocument9 pagesSine Output DDSs A Survey of The State of The ArtTiagoNo ratings yet
- L02 LogicDocument45 pagesL02 LogicthienvugcsNo ratings yet
- D D D D D D D D D D D D D D D D: SN75ALS170, SN75ALS170A Triple Differential Bus TransceiverDocument22 pagesD D D D D D D D D D D D D D D D: SN75ALS170, SN75ALS170A Triple Differential Bus TransceiverDedii KurniawanNo ratings yet
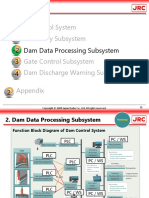
- Dam Control System Telemetry Subsystem Gate Control Subsystem Dam Discharge Warning Subsystem AppendixDocument12 pagesDam Control System Telemetry Subsystem Gate Control Subsystem Dam Discharge Warning Subsystem AppendixDen Bagus GWNo ratings yet
- FFT Imp ButterflyDocument14 pagesFFT Imp ButterflyFarhaNazneenNo ratings yet
- Mano CpuDocument8 pagesMano Cpuarsalan ghasemianNo ratings yet
- Architecture: Digital Signal Controller TMS320F2812Document16 pagesArchitecture: Digital Signal Controller TMS320F2812hiangcuongNo ratings yet
- DVP - Special RegisterDocument12 pagesDVP - Special RegisterthiagoNo ratings yet
- Lecture 4 FSMDocument6 pagesLecture 4 FSMMustafaNo ratings yet
- Lecture 6 RTL Design 2Document3 pagesLecture 6 RTL Design 2MustafaNo ratings yet
- Lecture 3 DataPath ComponentsDocument9 pagesLecture 3 DataPath ComponentsMustafaNo ratings yet
- Lecture 5 RTL DesignDocument7 pagesLecture 5 RTL DesignMustafaNo ratings yet
- Lecture 2 DataPath Components 2Document11 pagesLecture 2 DataPath Components 2MustafaNo ratings yet
- EE3002 Part2Document86 pagesEE3002 Part2MustafaNo ratings yet
- EE3002 Part4Document125 pagesEE3002 Part4MustafaNo ratings yet
- EE3002 Part5Document37 pagesEE3002 Part5MustafaNo ratings yet
- Speech As A Signal of Social IdentityDocument25 pagesSpeech As A Signal of Social IdentityAysha BahaaNo ratings yet
- PV Technology - LatestDocument21 pagesPV Technology - LatestZaferullah KhanNo ratings yet
- Worksheet ExerciseDocument2 pagesWorksheet Exerciseshaan shekharNo ratings yet
- AGASTHYA RASAYANAM - Arya Vaidya Sala KottakkalDocument1 pageAGASTHYA RASAYANAM - Arya Vaidya Sala KottakkalcmkkaranNo ratings yet
- Dylos Conversion Education - Cehs.health - Umt.eduDocument117 pagesDylos Conversion Education - Cehs.health - Umt.eduMCNo ratings yet
- Journal Publication Details of VIT For January 2024Document88 pagesJournal Publication Details of VIT For January 2024sugumaran.vNo ratings yet
- Module of Instruction: Qualification Unit of Competency Code Module Title Module DescriptorDocument4 pagesModule of Instruction: Qualification Unit of Competency Code Module Title Module DescriptorYeng Lugtu0% (1)
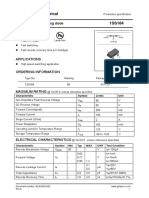
- B3 SMD Datasheet PDFDocument4 pagesB3 SMD Datasheet PDFJayceemikelNo ratings yet
- Climate Change and Emerging Food Safety Issues - A ReviewDocument14 pagesClimate Change and Emerging Food Safety Issues - A ReviewKerian FerreiraNo ratings yet
- Infotech4ed WS U17TheWeb PDFDocument1 pageInfotech4ed WS U17TheWeb PDFValeria MedinaNo ratings yet
- RLMXtreme UV-Full Submittal Package 1.11Document17 pagesRLMXtreme UV-Full Submittal Package 1.11Oscar SiriasNo ratings yet
- 1 s2.0 S0278612521000601 MainDocument16 pages1 s2.0 S0278612521000601 MainPrarthanaNo ratings yet
- Essays On GlobalisationDocument7 pagesEssays On Globalisationd3gxt9qh100% (2)
- Amy Hollywood "Sensible Ecstasy" ReviewDocument6 pagesAmy Hollywood "Sensible Ecstasy" ReviewJack MitchellNo ratings yet
- SP107E Bluetooth LED Music Controller 1. Features:: Professional Manufacturer of LED Lighting and Control SystemsDocument8 pagesSP107E Bluetooth LED Music Controller 1. Features:: Professional Manufacturer of LED Lighting and Control Systemsguuh2004No ratings yet
- Diagram 2 Data Link ConnectorDocument1 pageDiagram 2 Data Link ConnectorJoycee Lázaro ReyesNo ratings yet
- Week 8 Perdev LasDocument8 pagesWeek 8 Perdev LasMay AnneNo ratings yet
- Comparative Analysis Between Lime and Cement Mortar in Traditional BuildingsDocument44 pagesComparative Analysis Between Lime and Cement Mortar in Traditional BuildingsGAURAV mISHRANo ratings yet
- DZ 200 CdiDocument2 pagesDZ 200 CdipowerveeNo ratings yet
- Consultant ListDocument9 pagesConsultant ListFitsum DojuNo ratings yet
- RTC ShockDocument16 pagesRTC ShockMarcelNo ratings yet
- Lesson Plan - Language Arts Feb 27Document2 pagesLesson Plan - Language Arts Feb 27api-346889248No ratings yet
- Case Study of Kaleshwaram ProjectDocument4 pagesCase Study of Kaleshwaram ProjectsujithaNo ratings yet