You might also like
- Answers to Selected Problems in Multivariable Calculus with Linear Algebra and SeriesFrom EverandAnswers to Selected Problems in Multivariable Calculus with Linear Algebra and SeriesRating: 1.5 out of 5 stars1.5/5 (2)
- CXC Specimen Paper 2010Document10 pagesCXC Specimen Paper 2010PBGYB0% (1)
- Projects With Microcontrollers And PICCFrom EverandProjects With Microcontrollers And PICCRating: 5 out of 5 stars5/5 (1)
- ASP - Net MVC IntroductionDocument45 pagesASP - Net MVC IntroductionJunaid ArshadNo ratings yet
- OpenText Extended ECM For SAP Solutions 16.2 - Installation and Upgrade Guide English (ERLK160200-00-IGD-En-01)Document184 pagesOpenText Extended ECM For SAP Solutions 16.2 - Installation and Upgrade Guide English (ERLK160200-00-IGD-En-01)Praveen RaoNo ratings yet
- Hyperion Planning Admin Guide 11.1.1.3Document326 pagesHyperion Planning Admin Guide 11.1.1.3love2tin100% (1)
- 7012 DeltaV Training NotesDocument197 pages7012 DeltaV Training Notesfransiskus matondang100% (3)
- Verilog Code For AluDocument7 pagesVerilog Code For Alumeaow88100% (3)
- SAP Oracle BackupDocument52 pagesSAP Oracle BackupSanket KohliNo ratings yet
- "Pong" The Game, Implemented On An Altera Flex EPF10K70CR240-4 FPGADocument18 pages"Pong" The Game, Implemented On An Altera Flex EPF10K70CR240-4 FPGAminhmendNo ratings yet
- Learn Digital and Microprocessor Techniques On Your Smartphone: Portable Learning, Reference and Revision Tools.From EverandLearn Digital and Microprocessor Techniques On Your Smartphone: Portable Learning, Reference and Revision Tools.No ratings yet
- Labsheet 10 Sourav VerilogDocument12 pagesLabsheet 10 Sourav VerilogSourav KunduNo ratings yet
- Lab 4Document25 pagesLab 4Santosh Kumar100% (1)
- System Verilog AND Verification : Department OF Electronics AND Communication B M S College OF EngineeringDocument13 pagesSystem Verilog AND Verification : Department OF Electronics AND Communication B M S College OF EngineeringSanjanaNo ratings yet
- Lab 9 &10 - Shift Register - Circuit & PgmsDocument5 pagesLab 9 &10 - Shift Register - Circuit & PgmsGirish Gowtham DevatiNo ratings yet
- XlinkslibDocument8 pagesXlinkslibrudrarudraharaNo ratings yet
- Digital System Design Example 1: GCD Calculator: Start Signal, Which Commences The Computation ProcessDocument31 pagesDigital System Design Example 1: GCD Calculator: Start Signal, Which Commences The Computation ProcessEMJAYNo ratings yet
- Lab 4Document17 pagesLab 4Prithvi RastogiNo ratings yet
- BSD Using FPGADocument3 pagesBSD Using FPGAALVARONo ratings yet
- VHDL CodesDocument9 pagesVHDL CodesSaneesh KarayilNo ratings yet
- Lecture 7: Projects 2 and 3Document17 pagesLecture 7: Projects 2 and 3Sivasubramanian ManickamNo ratings yet
- Verilog Programs 5th UnitDocument14 pagesVerilog Programs 5th UnitVenkat ChadalavadaNo ratings yet
- 22bce20019. Lab Report-DldDocument40 pages22bce20019. Lab Report-Dldrockstarguy2005No ratings yet
- Verilog Code For AluDocument7 pagesVerilog Code For Aludivya gogineniNo ratings yet
- Verilog Code For AluDocument7 pagesVerilog Code For Aludivya gogineniNo ratings yet
- DSD Task 5Document30 pagesDSD Task 5AakashNo ratings yet
- MemoriiDocument34 pagesMemoriimarcelinyNo ratings yet
- ASIC Assignment 01Document5 pagesASIC Assignment 01Nisar Ahmed RanaNo ratings yet
- ASIC Design Lab ReportsDocument16 pagesASIC Design Lab ReportsNisar Ahmed RanaNo ratings yet
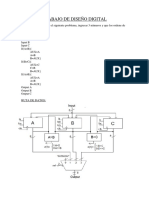
- Trabajo de Diseño02Document10 pagesTrabajo de Diseño02Alvaro SegoviaNo ratings yet
- Trabajo de Diseño02Document10 pagesTrabajo de Diseño02Victor yurivilca lazoNo ratings yet
- Eee 270 Advanced Topics in Logic Design More On FSMDS: References/CreditsDocument27 pagesEee 270 Advanced Topics in Logic Design More On FSMDS: References/CreditsPraveen MeduriNo ratings yet
- Cycle 3 Part BDocument10 pagesCycle 3 Part BNithyashree MNo ratings yet
- Unit 4Document9 pagesUnit 4Comrade Venkata HarshaNo ratings yet
- Verilog: Codificadores Y DecodificadoresDocument12 pagesVerilog: Codificadores Y DecodificadoresHamza AmariNo ratings yet
- Hardware Interfaces To 8051: 1. LCD 2. Keyboard 3. ADC 4. DAC 5. Stepper Motor 6. DC MotorDocument32 pagesHardware Interfaces To 8051: 1. LCD 2. Keyboard 3. ADC 4. DAC 5. Stepper Motor 6. DC MotorRudresh RakeshNo ratings yet
- Lab11 - Achmad Mauludin - 165060301111002Document17 pagesLab11 - Achmad Mauludin - 165060301111002Mauudin BRgNo ratings yet
- Assignment 3Document8 pagesAssignment 3Pranavkumar PatilNo ratings yet
- Unit 3Document34 pagesUnit 3Amitav DasNo ratings yet
- Verilog Modules For Common Digital FunctionsDocument30 pagesVerilog Modules For Common Digital Functionssudarshan poojaryNo ratings yet
- Shift RegisterDocument9 pagesShift Registersilent nameNo ratings yet
- PDF Primary-Whatsapp-Media-Whatsapp-Documents-VlsilabquestDocument17 pagesPDF Primary-Whatsapp-Media-Whatsapp-Documents-VlsilabquestSanju SraNo ratings yet
- Hardwired DPDocument2 pagesHardwired DPDaniel FelipeNo ratings yet
- Document From ?Document55 pagesDocument From ?Sudeep KrishnappaNo ratings yet
- Assignment 1Document14 pagesAssignment 1Pranavkumar PatilNo ratings yet
- Vlsi 1Document16 pagesVlsi 1vijay78rNo ratings yet
- Tutorial 1Document29 pagesTutorial 1A'ziz MoNo ratings yet
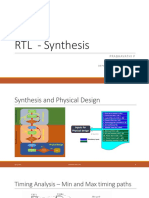
- RTL Synthesis - Generic GuideDocument30 pagesRTL Synthesis - Generic GuideSree Hari BaadshahNo ratings yet
- Assignment-10: DFF CodeDocument8 pagesAssignment-10: DFF CodeNarendra Babu GunnamNo ratings yet
- Chapter - 05 - Sequential CircuitsDocument46 pagesChapter - 05 - Sequential Circuitskidgod2111No ratings yet
- Atmega Mikro BascomDocument25 pagesAtmega Mikro BascomsanNo ratings yet
- (D, T, RS, JK) Along With Testbench.: ASSIGNMENT: Design & Verify The Operation Flip-FlopsDocument9 pages(D, T, RS, JK) Along With Testbench.: ASSIGNMENT: Design & Verify The Operation Flip-FlopsAkshatNo ratings yet
- Verilog Mtech ProgramsDocument68 pagesVerilog Mtech ProgramsFarin FatimaNo ratings yet
- Dcs-Ii Lab File: - Anupam Sobti 17/EC/09Document19 pagesDcs-Ii Lab File: - Anupam Sobti 17/EC/09Ankit GoelNo ratings yet
- Lab 12Document9 pagesLab 12Saim AshrafNo ratings yet
- Lab 4Document23 pagesLab 4Suyash MishraNo ratings yet
- LAB02 ReportDocument8 pagesLAB02 Report21021326 Phùng Mạnh KhangNo ratings yet
- Sequential Design Using Verilog HDL: D Flip Flop Using Gate LevelDocument9 pagesSequential Design Using Verilog HDL: D Flip Flop Using Gate LevelYudhajit RoyNo ratings yet
- Experiment-1 Combinational CircuitsDocument15 pagesExperiment-1 Combinational CircuitsAvinashNo ratings yet
- VHDL SynthesisDocument91 pagesVHDL SynthesisFennil KinsperNo ratings yet
- Lab 5 DSDDocument6 pagesLab 5 DSDRohaidNo ratings yet
- Sumator Cu Anticiparea TransportuluiDocument10 pagesSumator Cu Anticiparea TransportuluiCristea YoanaNo ratings yet
- 22BCP367 DECO Assignment 5Document11 pages22BCP367 DECO Assignment 5Smit PatelNo ratings yet
- Experiment - 6: Cs6105 - Digital Computer and Fundamental OrganisationDocument17 pagesExperiment - 6: Cs6105 - Digital Computer and Fundamental OrganisationVezhaventhanNo ratings yet
- Control Signals Flow: Comparator Output INA INB A - B B - A A - Sel B - Sel A - LD B - LD REG A REG B A BDocument27 pagesControl Signals Flow: Comparator Output INA INB A - B B - A A - Sel B - Sel A - LD B - LD REG A REG B A BPRAVALLIKA VYSYARAJUNo ratings yet
- 4bit Binary (Up) Counter Using Synchronous Reset: Code:: Assignment Shift Registers and CountersDocument11 pages4bit Binary (Up) Counter Using Synchronous Reset: Code:: Assignment Shift Registers and CountersNarendra gunnamNo ratings yet
- DISH Proprietary & Confidential - Not To Be Shared Without NDADocument3 pagesDISH Proprietary & Confidential - Not To Be Shared Without NDALakshmi Kant YadavNo ratings yet
- Ict NotesDocument4 pagesIct Noteschelsea nelsonNo ratings yet
- CPE 626 Advanced VLSI Design Lecture 3: VHDL Recapitulation: Aleksandar MilenkovicDocument120 pagesCPE 626 Advanced VLSI Design Lecture 3: VHDL Recapitulation: Aleksandar Milenkovicbasavaraj hagaratagiNo ratings yet
- P1016 Qoriq Integrated Processor Hardware Specifications: Data Sheet: Technical DataDocument106 pagesP1016 Qoriq Integrated Processor Hardware Specifications: Data Sheet: Technical Datareza_azadNo ratings yet
- Database Concurrency ComparatorDocument2 pagesDatabase Concurrency ComparatorManglesh PareekNo ratings yet
- TomoTherapy VoLOSellSheet PDFDocument2 pagesTomoTherapy VoLOSellSheet PDFMalu Paras LacsonNo ratings yet
- LM122Document15 pagesLM122huan carlosNo ratings yet
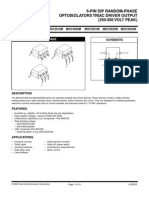
- MOC3021Document10 pagesMOC3021RamonNo ratings yet
- Creating An Android AppDocument9 pagesCreating An Android AppkhalifsilmiNo ratings yet
- Control Processing Unit (CPU) : AssignmentDocument5 pagesControl Processing Unit (CPU) : AssignmentBlackBeardNo ratings yet
- Tps 73733Document31 pagesTps 73733bhtkevinNo ratings yet
- It Is Intimated That Following Lectures Will Not Be Repeated and Would Be Part of Mid-Term & Final Exam As WellDocument12 pagesIt Is Intimated That Following Lectures Will Not Be Repeated and Would Be Part of Mid-Term & Final Exam As WellFaryal AftabNo ratings yet
- On Modelling and Validation of The MQTT Iot Protocol For M2M CommunicationDocument20 pagesOn Modelling and Validation of The MQTT Iot Protocol For M2M CommunicationDươngTK VlogsNo ratings yet
- IRC5-Rapid Overview 3HAC16580-1 - Revb - en - Library PDFDocument228 pagesIRC5-Rapid Overview 3HAC16580-1 - Revb - en - Library PDFjdcpe17No ratings yet
- Logcat 1702607268458Document11 pagesLogcat 1702607268458Anjar SaputtraNo ratings yet
- Use RADIONIC CARDS On MOBILE PHONESDocument2 pagesUse RADIONIC CARDS On MOBILE PHONESChandana Ashok NaiduNo ratings yet
- Arrays and Structures in CPPDocument55 pagesArrays and Structures in CPPEsubalew ChekolNo ratings yet
- Meri-Cal II: Model 3600 & 3610 Pressure CalibratorDocument3 pagesMeri-Cal II: Model 3600 & 3610 Pressure CalibratorAbdalhakeem AlturkyNo ratings yet
- Test Codes, Poseidon SE7ENDocument2 pagesTest Codes, Poseidon SE7ENBagus Sri WibowoNo ratings yet
- Ma He SHDocument3 pagesMa He SHparvezkhan770No ratings yet
- Electronics Troubleshooting Ilt Switches/Sensors/Solenoids: Global Manpower DevelopmentDocument28 pagesElectronics Troubleshooting Ilt Switches/Sensors/Solenoids: Global Manpower DevelopmentaimerNo ratings yet
- UE2 SourceLinkDocument167 pagesUE2 SourceLinkPepe FernandezNo ratings yet
- FusionAccess V100R006C00 Release NotesDocument18 pagesFusionAccess V100R006C00 Release NotesBisrat AwayeNo ratings yet