You might also like
- Workshop 4 - Draft2Document6 pagesWorkshop 4 - Draft2Saatwick MathurNo ratings yet
- Inner OctavesDocument223 pagesInner OctavesMarcoAntonioEncinasValenzuela100% (4)
- Caribbean and Standard EnglishDocument4 pagesCaribbean and Standard EnglishHassan Basarally50% (2)
- 830-00742-47 ZMS Admin GuideDocument158 pages830-00742-47 ZMS Admin Guidepolan78No ratings yet
- Control Lab All Exp and Reports in Single PDF (Abdullah Ibn Mahmud) PDFDocument183 pagesControl Lab All Exp and Reports in Single PDF (Abdullah Ibn Mahmud) PDFShakil Ahmed100% (1)
- HW392m Final05Document3 pagesHW392m Final05karen dejoNo ratings yet
- SolutionDocument12 pagesSolutionlathikaNo ratings yet
- Phase 2Document12 pagesPhase 2pareesabuxshoroNo ratings yet
- E R Damper Based Semi-Active SuspensionDocument3 pagesE R Damper Based Semi-Active SuspensionRaja Amer AzimNo ratings yet
- Project Report Mod2Document5 pagesProject Report Mod2Katheryn GalarzaNo ratings yet
- Lecture 9 (33-38)Document6 pagesLecture 9 (33-38)Saif AlabdullahNo ratings yet
- Week-9-LQR ControlDocument15 pagesWeek-9-LQR ControlAhmad Hassan FarooqiNo ratings yet
- Disctrete Time Feedback Linearization Method For Dynamical Adaptive Control of Electronic ThrottleDocument5 pagesDisctrete Time Feedback Linearization Method For Dynamical Adaptive Control of Electronic ThrottleBodoShowNo ratings yet
- Informe IEEE - Baltazar - Palma - ParedesDocument12 pagesInforme IEEE - Baltazar - Palma - ParedesBranco Palma RodriguezNo ratings yet
- EEE 4706 Expt 5Document12 pagesEEE 4706 Expt 5Rummanur RahadNo ratings yet
- Control Lab All Exp and Reports in Single PDF (Abdullah Ibn Mahmud)Document183 pagesControl Lab All Exp and Reports in Single PDF (Abdullah Ibn Mahmud)Anik PaulNo ratings yet
- Objectives 2Document17 pagesObjectives 2Shaikhan NadzemiNo ratings yet
- Danial ReportDocument11 pagesDanial ReportImran AliNo ratings yet
- My AssignmentDocument11 pagesMy AssignmentAkhila ChandranNo ratings yet
- Chapter 3Document10 pagesChapter 3rivawe1402No ratings yet
- Controller DesignDocument6 pagesController Designapi-402557994No ratings yet
- Shubhobrata Rudra Presentation On Backstepping Control1Document139 pagesShubhobrata Rudra Presentation On Backstepping Control1Shubho RudraNo ratings yet
- Analysis of Autopilot System IntegratedDocument11 pagesAnalysis of Autopilot System IntegratedAko si KosaNo ratings yet
- Multiloop Control SystemDocument4 pagesMultiloop Control SystemAkash SahaNo ratings yet
- Controller (Notes)Document22 pagesController (Notes)Alex OsesNo ratings yet
- UCK 363E Automatic Control II Lecture Notes 10 State Space Control of Servo Mechanism Linear Quadratic Regulator (LQR) Control DesignDocument6 pagesUCK 363E Automatic Control II Lecture Notes 10 State Space Control of Servo Mechanism Linear Quadratic Regulator (LQR) Control DesignCeren DENİZNo ratings yet
- Exp01 EEE318Document7 pagesExp01 EEE318Abid AbdullahNo ratings yet
- W7BDocument19 pagesW7BShujah RashidNo ratings yet
- Control Systems PID Controller Solved ManualDocument17 pagesControl Systems PID Controller Solved ManualJaweria ZafarNo ratings yet
- FCS Lab-1Document46 pagesFCS Lab-1muhammadNo ratings yet
- Lecture 6 (21-24)Document4 pagesLecture 6 (21-24)Saif AlabdullahNo ratings yet
- 2.1 Closed Loop SISO ControlDocument5 pages2.1 Closed Loop SISO ControlJoy Krishna MondalNo ratings yet
- Inno2020 Emt4203 Control II Chap2a PidsDocument35 pagesInno2020 Emt4203 Control II Chap2a Pidskabuej3No ratings yet
- 2023 - Mee 501 - NewDocument71 pages2023 - Mee 501 - NewWasiu OseiweNo ratings yet
- ECE 425 - General QuestionsDocument15 pagesECE 425 - General QuestionsAmos AtandiNo ratings yet
- Control Lec 6Document7 pagesControl Lec 6Mhabad ZebariNo ratings yet
- 16.323 Principles of Optimal Control: Mit OpencoursewareDocument4 pages16.323 Principles of Optimal Control: Mit OpencoursewareSantosh KiranNo ratings yet
- Design ProjectDocument6 pagesDesign Projectapi-450506674No ratings yet
- A Model-Free Control Algorithm Derived Using The Sliding Mode Control MethodDocument9 pagesA Model-Free Control Algorithm Derived Using The Sliding Mode Control MethodSang NhNo ratings yet
- Lab 3Document17 pagesLab 3hassan ullah khanNo ratings yet
- 5 SimulationDocument5 pages5 SimulationMahdi AnsariNo ratings yet
- FYP PresentationDocument81 pagesFYP PresentationTarek Bmr100% (1)
- Control of Binary Input Systems: William HOLDERBAUMDocument15 pagesControl of Binary Input Systems: William HOLDERBAUMIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalNo ratings yet
- Control Example Using MatlabDocument37 pagesControl Example Using MatlabRizkie Denny PratamaNo ratings yet
- MCT Question BankDocument5 pagesMCT Question BankKalamchety Ravikumar SrinivasaNo ratings yet
- Robust H Controller For Construction Elevator Drivesystem Vibrations AttenuatorDocument9 pagesRobust H Controller For Construction Elevator Drivesystem Vibrations AttenuatorDr Saba TareqNo ratings yet
- FEEDCON - Lesson 08 - Closed-Loop Control Systems Part 2Document36 pagesFEEDCON - Lesson 08 - Closed-Loop Control Systems Part 2Junaid YNo ratings yet
- Control of Inverted PendulumDocument5 pagesControl of Inverted PendulumalfredccNo ratings yet
- Assignment 1Document4 pagesAssignment 1Utkarsh AryaNo ratings yet
- MECH6091 - Poject1.Flight Control Systems - Qball Quadrotor HelicopterDocument28 pagesMECH6091 - Poject1.Flight Control Systems - Qball Quadrotor HelicopterOmar MalikNo ratings yet
- 3 Inverted Pendulum ProjectDocument26 pages3 Inverted Pendulum ProjectJoshua D JohnNo ratings yet
- A Laboratory Journal For: Control System Engineering (2150909)Document37 pagesA Laboratory Journal For: Control System Engineering (2150909)Bhavik PrajapatiNo ratings yet
- E102 Using MATLAB in Feedback Systems Part I. Classical DesignDocument18 pagesE102 Using MATLAB in Feedback Systems Part I. Classical DesignLê Tuấn Minh100% (1)
- Sliding Mode Control: EE5104 Adaptive Control System AY2009/2010 CA2 Mini-ProjectDocument24 pagesSliding Mode Control: EE5104 Adaptive Control System AY2009/2010 CA2 Mini-ProjectasbbabaNo ratings yet
- PID Controller: Effects of Integral & Derivative Control Actions On System PerformanceDocument14 pagesPID Controller: Effects of Integral & Derivative Control Actions On System PerformanceNasar khan shamozaiNo ratings yet
- Control Exp 9 Student ManualDocument22 pagesControl Exp 9 Student ManualMohammad Bony IsrailNo ratings yet
- Tutorial On Input Shaping/Time Delay Control of Maneuvering Flexible StructuresDocument16 pagesTutorial On Input Shaping/Time Delay Control of Maneuvering Flexible Structures원성규No ratings yet
- Control of An Unstable Inverted Pendulum SystemDocument11 pagesControl of An Unstable Inverted Pendulum SystemShivankyJaiswalNo ratings yet
- Application of Adaptive Backstepping For The Control of A Reusable Launch VehicleDocument17 pagesApplication of Adaptive Backstepping For The Control of A Reusable Launch VehicleAnoop SreeNo ratings yet
- University of Khartoum Faculty of Engineering Chemical Engineering DepartmentDocument17 pagesUniversity of Khartoum Faculty of Engineering Chemical Engineering DepartmentmurtadaNo ratings yet
- University of Basrah For Gas and Oil College of Oil and Gas Engineering Department of Chemical and Petroleum Refining EngineeringDocument24 pagesUniversity of Basrah For Gas and Oil College of Oil and Gas Engineering Department of Chemical and Petroleum Refining Engineeringكرار نعيمNo ratings yet
- Control of DC Motor Using Different Control StrategiesFrom EverandControl of DC Motor Using Different Control StrategiesNo ratings yet
- Nonlinear Control Feedback Linearization Sliding Mode ControlFrom EverandNonlinear Control Feedback Linearization Sliding Mode ControlNo ratings yet
- Naukri Shikha (2y 0m)Document2 pagesNaukri Shikha (2y 0m)KaranMPaiNo ratings yet
- O2 Graduation ScriptDocument3 pagesO2 Graduation ScriptFahmia Angkal SalilaguiaNo ratings yet
- CP-7821 Telefono IpDocument13 pagesCP-7821 Telefono IpEDMUNDO HAYASHINo ratings yet
- Python For Oil and Gas: Website - Linkedin - YoutubeDocument10 pagesPython For Oil and Gas: Website - Linkedin - YoutubeLIC HelperNo ratings yet
- Leitor Magellan-2300HSDocument432 pagesLeitor Magellan-2300HSreinaldoNo ratings yet
- Glossary On Automobile Vocabulary in English, Swedish, Finnish, German, Bulgarian and GreekDocument18 pagesGlossary On Automobile Vocabulary in English, Swedish, Finnish, German, Bulgarian and GreekVeronicaGelfgrenNo ratings yet
- Office Automation Tools - BCA-106-VI-ADocument2 pagesOffice Automation Tools - BCA-106-VI-Akailasbankar96No ratings yet
- Let's Love by Sia and David Guetta: (Intro) DirectionsDocument5 pagesLet's Love by Sia and David Guetta: (Intro) DirectionsFernanda BaruffiNo ratings yet
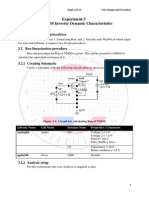
- Exp - No.3 CMOS Inverter Dynamic CharacteristicsDocument5 pagesExp - No.3 CMOS Inverter Dynamic CharacteristicsnarashimarajaNo ratings yet
- Lecture One/ Paragraph Writing General PDFDocument20 pagesLecture One/ Paragraph Writing General PDFOmnia Elkholy50% (2)
- Pre Training Tasks (Given by Pso To Teachers)Document11 pagesPre Training Tasks (Given by Pso To Teachers)moiNo ratings yet
- Pre Nect MTH 1Document4 pagesPre Nect MTH 1nassorussi9No ratings yet
- Faithfulness As A Soul-Making TheodicyDocument96 pagesFaithfulness As A Soul-Making TheodicyWellmanNo ratings yet
- PDFDocument53 pagesPDFCecille Robles San Jose100% (1)
- The Ekavratya Indra and The SunDocument32 pagesThe Ekavratya Indra and The Sunporridge23No ratings yet
- ENGLISH Subject CHSL2021 42 Shifts RBE CompressedDocument155 pagesENGLISH Subject CHSL2021 42 Shifts RBE CompressedpriyasNo ratings yet
- IRS 2 - Living o-WPS OfficeDocument21 pagesIRS 2 - Living o-WPS OfficePATRICK DEGAMONo ratings yet
- MAD Lab DocumentDocument32 pagesMAD Lab DocumentDhyan MohanNo ratings yet
- Placement PreparationDocument3 pagesPlacement PreparationVishu AsensioNo ratings yet
- Mind MapsDocument7 pagesMind MapsnasrullahdharejoNo ratings yet
- My Life 2 SyllabusDocument3 pagesMy Life 2 SyllabusNorma AcostaNo ratings yet
- JU Research Protocol-1Document15 pagesJU Research Protocol-1MesfinNo ratings yet
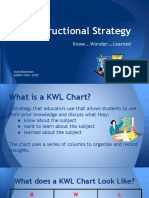
- KWL Instructional Strategy: Know... Wonder... LearnedDocument11 pagesKWL Instructional Strategy: Know... Wonder... LearnedRodelita VillalobosNo ratings yet
- CH 2-Software Testing Fundamentals - KMDocument42 pagesCH 2-Software Testing Fundamentals - KMakash chandankarNo ratings yet
- Hamza AmjadfmjDocument5 pagesHamza AmjadfmjHamza AmjadNo ratings yet
- Hindu SalutationsDocument16 pagesHindu SalutationsQian CaoNo ratings yet
- Parallel DFSDocument10 pagesParallel DFSSurinder SoodNo ratings yet