You might also like
- Comandos OLT c300Document19 pagesComandos OLT c300Cesar Maldonado100% (5)
- Hashicorp Certified Terraform Associate Practice Questions - AdvancedDocument32 pagesHashicorp Certified Terraform Associate Practice Questions - AdvancedNARASIMHA CHARYNo ratings yet
- Splunk 6.3.1 ForwardingDocument159 pagesSplunk 6.3.1 Forwardingdeoko72No ratings yet
- Autonomous Robot OperationDocument16 pagesAutonomous Robot OperationDiego CorreaNo ratings yet
- Report V1.1.4.finalDocument17 pagesReport V1.1.4.finalDiego CorreaNo ratings yet
- Region Covariance Based Object Tracking Using Monte Carlo MethodDocument4 pagesRegion Covariance Based Object Tracking Using Monte Carlo MethodVasuhi SamyduraiNo ratings yet
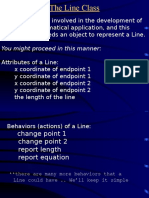
- You Might Proceed in This MannerDocument17 pagesYou Might Proceed in This MannerChintan ManekNo ratings yet
- Real-Time Image Processing Algorithms For Object and Distances Identification in Mobile Robot Trajectory PlanningDocument6 pagesReal-Time Image Processing Algorithms For Object and Distances Identification in Mobile Robot Trajectory PlanningamitsbhatiNo ratings yet
- Figure 1: Queue Abstract Data TypeDocument3 pagesFigure 1: Queue Abstract Data TypeSouban JavedNo ratings yet
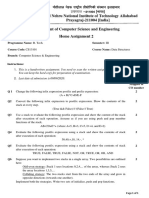
- Home Assignment 2 1Document1 pageHome Assignment 2 1Krishna sahNo ratings yet
- Detection of Rooftop Regions in Rural Areas Using Support Vector MachineDocument5 pagesDetection of Rooftop Regions in Rural Areas Using Support Vector MachineijsretNo ratings yet
- Detecting and Modeling Doors With Mobile Robots: Dragomir Anguelov, Daphne Koller, Evan Parker, Sebastian ThrunDocument8 pagesDetecting and Modeling Doors With Mobile Robots: Dragomir Anguelov, Daphne Koller, Evan Parker, Sebastian ThrunsigmateNo ratings yet
- A Dynamic Conditional Random Field Model For Joint Labeling of Object and Scene ClassesDocument14 pagesA Dynamic Conditional Random Field Model For Joint Labeling of Object and Scene ClassesthegrandintellectNo ratings yet
- Object Detection and Classification Using Yolov3 IJERTV10IS020078Document6 pagesObject Detection and Classification Using Yolov3 IJERTV10IS020078ikhwancules46No ratings yet
- Real-Time Tracking Algorithm With Locking On A Given Object For VLSI CNN-UM ImplementationsDocument6 pagesReal-Time Tracking Algorithm With Locking On A Given Object For VLSI CNN-UM ImplementationsDeni ChanNo ratings yet
- 1214 - خمسه عشریDocument5 pages1214 - خمسه عشریm1.nourianNo ratings yet
- Research of Multi-Object Detection and Tracking Using Machine Learning Based On Knowledge For Video Surveillance SystemDocument10 pagesResearch of Multi-Object Detection and Tracking Using Machine Learning Based On Knowledge For Video Surveillance SystemBredino LolerNo ratings yet
- Detection and Tracking of The Vanishing Point On A Horizon For Automotive ApplicationsDocument6 pagesDetection and Tracking of The Vanishing Point On A Horizon For Automotive ApplicationsMounir El MaghraouiNo ratings yet
- 06 Long Range Obstacle Detection From A Monocular CameraDocument3 pages06 Long Range Obstacle Detection From A Monocular CameraWilliamNo ratings yet
- Fast Animal Detection in Uav Images Using Convolutional Neural NetworksDocument4 pagesFast Animal Detection in Uav Images Using Convolutional Neural NetworksHui ShanNo ratings yet
- Aircraft Recognition in High Resolution Satellite Images: P.C.Hemalatha, Mrs.M.Anitha M.E.Document5 pagesAircraft Recognition in High Resolution Satellite Images: P.C.Hemalatha, Mrs.M.Anitha M.E.theijesNo ratings yet
- Introduction To Probabilistic Graphical Models Practical Session 1Document2 pagesIntroduction To Probabilistic Graphical Models Practical Session 1KatherineMoralesNo ratings yet
- RBE - 3002 - Lab - 4 ReportDocument7 pagesRBE - 3002 - Lab - 4 ReportZachary RiverniderNo ratings yet
- 1 - Unit 19 - Assignment 1 FrontsheetDocument24 pages1 - Unit 19 - Assignment 1 FrontsheetBui Hoang Bao Anh (FGW DN)No ratings yet
- CG Question BankDocument17 pagesCG Question BankAnonymous DFpzhrRNo ratings yet
- Project Report On Contour DetectionDocument10 pagesProject Report On Contour DetectionRaghav GuptaNo ratings yet
- Sri Ramakrishna Institute of Technology: Academic Year 2016 - 17 Internal Test - I (August, 2016)Document10 pagesSri Ramakrishna Institute of Technology: Academic Year 2016 - 17 Internal Test - I (August, 2016)rnagu1969No ratings yet
- EojwoDocument9 pagesEojwoAsdf 9482No ratings yet
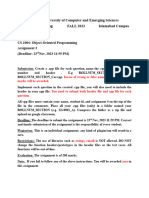
- OOP - Assignment - 1 - Spring 2021Document4 pagesOOP - Assignment - 1 - Spring 2021Maryam ZulfiqarNo ratings yet
- Presentation GeoxpDocument9 pagesPresentation GeoxpIrch NgoubiliNo ratings yet
- Zeng 2020Document12 pagesZeng 2020DANIEL ARTEAGA MENDOZANo ratings yet
- Object Detection Algorithm Based On YOLODocument11 pagesObject Detection Algorithm Based On YOLOManny MerazinniNo ratings yet
- Paper 597Document6 pagesPaper 597mezianeNo ratings yet
- Unit 2 Filled Area PrimitivesDocument8 pagesUnit 2 Filled Area PrimitivesANNIE JULIE.JOSEPHNo ratings yet
- Assignment 02Document5 pagesAssignment 02Muhammad HusnainNo ratings yet
- A Survey On Deep Network PDFDocument24 pagesA Survey On Deep Network PDFMateus MeirelesNo ratings yet
- Kernel-Based Hand TrackingDocument9 pagesKernel-Based Hand TrackingMhd Bassam El-HalabiNo ratings yet
- Object DetectionDocument10 pagesObject Detectionashmita deyNo ratings yet
- Assignmt 1Document9 pagesAssignmt 1lawac3No ratings yet
- Project Review - 2Document24 pagesProject Review - 2Vasuda yadav MarannagariNo ratings yet
- Object TrackDocument5 pagesObject TrackEngr EbiNo ratings yet
- Paper 11-Shape Prediction Linear Algorithm Using FuzzyDocument5 pagesPaper 11-Shape Prediction Linear Algorithm Using FuzzyEditor IJACSANo ratings yet
- Neural Networks Organizations To Learn Complex Robotic FunctionsDocument6 pagesNeural Networks Organizations To Learn Complex Robotic Functionslove_accNo ratings yet
- OOP Assignment 3Document7 pagesOOP Assignment 3sultanhaseeb12No ratings yet
- An Object-Oriented Finite-Element Program For Electromagnetic Field ComputationDocument4 pagesAn Object-Oriented Finite-Element Program For Electromagnetic Field ComputationPranav LadkatNo ratings yet
- Data Structures Assignment 1Document4 pagesData Structures Assignment 1Adil AzherNo ratings yet
- Ameya 2Document8 pagesAmeya 29mcjxnr2s9No ratings yet
- CS2401-Computer Graphics QBDocument8 pagesCS2401-Computer Graphics QBGopinath RamakrishnanNo ratings yet
- Spatial Feat EmbeddingDocument4 pagesSpatial Feat Embeddingmartin_321No ratings yet
- Java - Class, Object and Methods in Java: Class: Whatever We Can See in This World All The Things Are ADocument45 pagesJava - Class, Object and Methods in Java: Class: Whatever We Can See in This World All The Things Are Aabhimanyukumarthakur100% (1)
- 232 CO2003 AssignmentDocument17 pages232 CO2003 AssignmentNguyễn Phúc Bình KhangNo ratings yet
- A110 MohammedRayyan Dep8Document5 pagesA110 MohammedRayyan Dep8saransh.sahay263No ratings yet
- Chaos Image Encryption Using Pixel ShufflingDocument11 pagesChaos Image Encryption Using Pixel ShufflingCS & ITNo ratings yet
- Robust Zero-Watermarking of Images Using Neural Network: Santosh Chapaneri Radhika ChapaneriDocument6 pagesRobust Zero-Watermarking of Images Using Neural Network: Santosh Chapaneri Radhika ChapaneriSantosh ChapaneriNo ratings yet
- Using Mean-Shift Tracking Algorithms For Real-Time Tracking of Moving Images On An Autonomous Vehicle Testbed PlatformDocument10 pagesUsing Mean-Shift Tracking Algorithms For Real-Time Tracking of Moving Images On An Autonomous Vehicle Testbed PlatformRe HoNo ratings yet
- CH 3 Mutable ObjectsDocument14 pagesCH 3 Mutable ObjectsrazanNo ratings yet
- Prs Lab Eng DTDocument7 pagesPrs Lab Eng DTTeodora FurcoviciNo ratings yet
- Chapter 3: MUTABLE Objects: Programming 2 COMP 112Document14 pagesChapter 3: MUTABLE Objects: Programming 2 COMP 112razanNo ratings yet
- Real Object Recognition Using Moment Invariants: Muharrem Mercimek, Kayhan Gulez and Tarik Veli MumcuDocument11 pagesReal Object Recognition Using Moment Invariants: Muharrem Mercimek, Kayhan Gulez and Tarik Veli Mumcuavante_2005No ratings yet
- The Wrapper Classes: Byte Short Integer Long Character Float Double Boolean VoidDocument5 pagesThe Wrapper Classes: Byte Short Integer Long Character Float Double Boolean VoidJoel PerezNo ratings yet
- Unit 3 More Output Primitives and Geometric TransformationsDocument24 pagesUnit 3 More Output Primitives and Geometric TransformationsMuhammad SahilNo ratings yet
- Object Tracking Based On Pattern MatchingDocument4 pagesObject Tracking Based On Pattern Matchingeditor_ijarcsseNo ratings yet
- Raste Gar 2009Document4 pagesRaste Gar 20092020.satyam.dubeyNo ratings yet
- Query and Transformation in DBMS: Done by Ruban Christu RajDocument10 pagesQuery and Transformation in DBMS: Done by Ruban Christu RajRuban Christu rajNo ratings yet
- SAP ReferencesDocument9 pagesSAP Referencessai_balaji_8No ratings yet
- Data Science SyllabusDocument7 pagesData Science SyllabuslucasNo ratings yet
- Ec24 33Document3 pagesEc24 33asfghNo ratings yet
- Intdata An Array of Strings Twodarray A Two Dimensional ArrayDocument6 pagesIntdata An Array of Strings Twodarray A Two Dimensional ArraySumayya IshaqNo ratings yet
- FTK Primer - Getting StartedDocument73 pagesFTK Primer - Getting StartedJason KeysNo ratings yet
- Basics of Operating Systems (IT2019-2) : Assignment IVDocument3 pagesBasics of Operating Systems (IT2019-2) : Assignment IVGiang LeNo ratings yet
- Microsoft Azure IoT Reference ArchitectureDocument32 pagesMicrosoft Azure IoT Reference Architectureantonio6518No ratings yet
- Expert Ip Test ToolsDocument4 pagesExpert Ip Test ToolsEyK_TCNo ratings yet
- Jadwal Dahlia 22 (PJ)Document6 pagesJadwal Dahlia 22 (PJ)Hty SdyniNo ratings yet
- Best Practices For ESM Content Development: Ryan ThomasDocument42 pagesBest Practices For ESM Content Development: Ryan ThomasSantiago Suárez TovarNo ratings yet
- Log 150428Document4 pagesLog 150428kkei_pNo ratings yet
- Opmanager Best Practises GuideDocument16 pagesOpmanager Best Practises GuideJuan Carlos FernandezNo ratings yet
- Windows Manual ElxDocument197 pagesWindows Manual ElxArmand BasyNo ratings yet
- Pub-005183 2017-10!31!12Gbs MegaRAID SAS RAID Controllers User GuideDocument52 pagesPub-005183 2017-10!31!12Gbs MegaRAID SAS RAID Controllers User GuideBahman MirNo ratings yet
- II MID AnswersDocument56 pagesII MID AnswersDumpal KoteswararaoNo ratings yet
- Uts AccessDocument3 pagesUts AccessFachrurazy IsmailNo ratings yet
- 10.6.12 Lab - Use TFTP, Flash, and USB To Manage Configuration Files - ILMDocument17 pages10.6.12 Lab - Use TFTP, Flash, and USB To Manage Configuration Files - ILMMuhammad SaputraNo ratings yet
- Amb Administering AmbariDocument64 pagesAmb Administering AmbariLuis ValenciaNo ratings yet
- GA959 NV9USB/NV10USB Configuration Option Programming Card: Nv9Usb Nv10Usb Nv9Usb Nv10UsbDocument4 pagesGA959 NV9USB/NV10USB Configuration Option Programming Card: Nv9Usb Nv10Usb Nv9Usb Nv10UsbГеннадий ЧашницкийNo ratings yet
- RHCSA and RHCE Cert Guide and Lab ManualDocument318 pagesRHCSA and RHCE Cert Guide and Lab Manualgauravecec1980100% (1)
- SD-WAN 6.2 QuizDocument4 pagesSD-WAN 6.2 Quizpedro henriqueNo ratings yet
- Install New Image On Storage Device CB2, CB3 and E-SeriesDocument10 pagesInstall New Image On Storage Device CB2, CB3 and E-Series徐海东No ratings yet
- Assignment 3 - Buffer Overflows: ExampleDocument3 pagesAssignment 3 - Buffer Overflows: Exampleupasanachauhan1No ratings yet
- Essbase Rules FilesDocument15 pagesEssbase Rules FilessatyaqweNo ratings yet
- Ch3 Profiles, Password Policies, Privileges, and RolesDocument79 pagesCh3 Profiles, Password Policies, Privileges, and Rolesahlam alzhraniNo ratings yet
- IBM Tivoli Storage Manager Version Problem Determination GuideDocument243 pagesIBM Tivoli Storage Manager Version Problem Determination Guideashish.macqNo ratings yet