You might also like
- 100 IC CircuitsDocument34 pages100 IC CircuitselektrorwbNo ratings yet
- Dual-Clutch Transmission: Scalable HybridDocument4 pagesDual-Clutch Transmission: Scalable HybridSamadNo ratings yet
- History TakingDocument51 pagesHistory TakingJAMES TONNY OKINYINo ratings yet
- PAMDocument14 pagesPAMRashed IslamNo ratings yet
- Offshore Installations Marine Operations and Marine AnalysisDocument64 pagesOffshore Installations Marine Operations and Marine Analysisravi_4908No ratings yet
- Digital Twin Driven Prognostics and Health Management For ComplexequipmentDocument4 pagesDigital Twin Driven Prognostics and Health Management For ComplexequipmentAna Beatriz Teixeira100% (1)
- Cisco 1 Reviewer For Final ExamDocument9 pagesCisco 1 Reviewer For Final ExamAlNo ratings yet
- An Application Framework of Digital Twin and Its Case StudyDocument13 pagesAn Application Framework of Digital Twin and Its Case StudyJoão VitorNo ratings yet
- Implementation of Battery DT-Approach, Functionalities and BenefitsDocument21 pagesImplementation of Battery DT-Approach, Functionalities and BenefitsREX MATTHEWNo ratings yet
- Generalized Canonical Time WarpingDocument16 pagesGeneralized Canonical Time Warping蒋辰星No ratings yet
- Object-Oriented Analysis and Modeling For The Mining Production System of Fully Mechanized Sub-Level CavingDocument4 pagesObject-Oriented Analysis and Modeling For The Mining Production System of Fully Mechanized Sub-Level CavingDirceu NascimentoNo ratings yet
- Messerschmitt Timing PDFDocument16 pagesMesserschmitt Timing PDFTaharat HussainNo ratings yet
- 11 (2020) Yuan Li - Visual Object Tracking With Adaptive Structural Convolutional NetworkDocument11 pages11 (2020) Yuan Li - Visual Object Tracking With Adaptive Structural Convolutional Networkmat felNo ratings yet
- Challenges When Creating A Cohesive Digital Twin Ship A Data Modelling PerspectiveDocument15 pagesChallenges When Creating A Cohesive Digital Twin Ship A Data Modelling Perspectivegeng qinNo ratings yet
- A Deep Reinforcement Learning Approach For Real-Time Sensor-Driven Decision Making and Predictive AnalyticsDocument18 pagesA Deep Reinforcement Learning Approach For Real-Time Sensor-Driven Decision Making and Predictive AnalyticsAmmar AbbasNo ratings yet
- TarjomeFa F1004 EnglishDocument9 pagesTarjomeFa F1004 EnglishMohsen GolmohammadiNo ratings yet
- What Is Wrong With Scene Text Recognition? Model Comparisons Dataset and Model Analysis (2019)Document19 pagesWhat Is Wrong With Scene Text Recognition? Model Comparisons Dataset and Model Analysis (2019)Salvation TivaNo ratings yet
- An Introduction To Collective IntelligenceDocument88 pagesAn Introduction To Collective IntelligencepsiserviciosprofeNo ratings yet
- Sequential Deep Learning For Human Action RecognitionDocument12 pagesSequential Deep Learning For Human Action RecognitionVaroonNo ratings yet
- Algorithms: Digital Twins in Solar Farms: An Approach Through Time Series and Deep LearningDocument12 pagesAlgorithms: Digital Twins in Solar Farms: An Approach Through Time Series and Deep LearningkleistNo ratings yet
- CIRP Annals - Manufacturing TechnologyDocument4 pagesCIRP Annals - Manufacturing Technologyazaz 01No ratings yet
- Challenges in Computer Science: International Journal of Engineering and Technical Research September 2012Document4 pagesChallenges in Computer Science: International Journal of Engineering and Technical Research September 2012Mubeezi TimothyNo ratings yet
- Latent-Space Physics: Towards Learning The Temporal Evolution of Fluid FlowDocument16 pagesLatent-Space Physics: Towards Learning The Temporal Evolution of Fluid FlowrandNo ratings yet
- Risks: Machine Learning in P&C Insurance: A Review For Pricing and ReservingDocument26 pagesRisks: Machine Learning in P&C Insurance: A Review For Pricing and ReservingHouda MannaiNo ratings yet
- A Survey of Modern Deep Learning Based Object Detection ModelsDocument19 pagesA Survey of Modern Deep Learning Based Object Detection Modelsfnetflix746No ratings yet
- DES Special Issue EditorialDocument3 pagesDES Special Issue EditorialVamsi Krishna LakkarajuNo ratings yet
- 2008 Mobmod Working Day ModelDocument8 pages2008 Mobmod Working Day ModelMarisol BarrientosNo ratings yet
- Complementarity in Requirements TracingDocument10 pagesComplementarity in Requirements Tracingprs75No ratings yet
- Tao2018 - Digital Twin Driven Prognostics and Health Management For Complex EquipmentDocument4 pagesTao2018 - Digital Twin Driven Prognostics and Health Management For Complex EquipmentbmdeonNo ratings yet
- Yuan2020 Article ProRecAUnifiedContentCachingAnDocument13 pagesYuan2020 Article ProRecAUnifiedContentCachingAnUmer Bin SalmanNo ratings yet
- Theoretical Computer Science: Catherine C. McgeochDocument15 pagesTheoretical Computer Science: Catherine C. McgeochDANTENo ratings yet
- Multivariate Information Geometry Network ConstructuionDocument16 pagesMultivariate Information Geometry Network ConstructuionMarkus MeyerNo ratings yet
- Master - Thesis - Maria - Chiara - Cioffi - HenryDocument13 pagesMaster - Thesis - Maria - Chiara - Cioffi - HenryChioma UcheNo ratings yet
- 6 Digital - Twin - Networks - A - SurveyDocument16 pages6 Digital - Twin - Networks - A - SurveyOmar KhalifaNo ratings yet
- Wang KnowledgeDocument20 pagesWang KnowledgeAnshuman TagoreNo ratings yet
- Innovation in Computational Architecture and DesigDocument14 pagesInnovation in Computational Architecture and DesigLakad ChowdhuryNo ratings yet
- Effective Data Handling Architecture For Small SatDocument7 pagesEffective Data Handling Architecture For Small SatPhú HoàngNo ratings yet
- Applied Soft ComputingDocument12 pagesApplied Soft Computingyekopix432No ratings yet
- A Survey On Clustering TechniquesDocument22 pagesA Survey On Clustering TechniquesjyothiNo ratings yet
- Origins of The Digital Twin Concept: August 2016Document8 pagesOrigins of The Digital Twin Concept: August 2016Tanu KhandelwalNo ratings yet
- Digital Twin: Mitigating Unpredictable, Undesirable Emergent Behavior in Complex Systems (Excerpt)Document7 pagesDigital Twin: Mitigating Unpredictable, Undesirable Emergent Behavior in Complex Systems (Excerpt)Erdal TekinNo ratings yet
- Price GraphsDocument47 pagesPrice Graphslingyun weiNo ratings yet
- International Journal of Engineering Issues - Vol 2015 - No 2 - Paper4Document6 pagesInternational Journal of Engineering Issues - Vol 2015 - No 2 - Paper4sophiaNo ratings yet
- Controlled Computations or Computer Control?: John BarasDocument2 pagesControlled Computations or Computer Control?: John BarasalfredokpuNo ratings yet
- Synchronization of Data MeasurementsDocument11 pagesSynchronization of Data MeasurementsBot MTNo ratings yet
- 1 s2.0 S1047320319303128 MainDocument19 pages1 s2.0 S1047320319303128 MainEdwin LeeNo ratings yet
- 1 s2.0 S2352467723001364 MainDocument17 pages1 s2.0 S2352467723001364 MainUK YogurtNo ratings yet
- Digital Twins: State of The Art Theory and Practice, Challenges, and Open Research QuestionsDocument19 pagesDigital Twins: State of The Art Theory and Practice, Challenges, and Open Research QuestionsSerge BNo ratings yet
- Automation in Construction: C. Ferreira, L. Canhoto Neves, A. Silva, J. de BritoDocument10 pagesAutomation in Construction: C. Ferreira, L. Canhoto Neves, A. Silva, J. de BritoDaiane Teodoro AndradeNo ratings yet
- Embedded Implementations of Real Time Video Stabilization Mechanisms A Comprehensive ReviewDocument9 pagesEmbedded Implementations of Real Time Video Stabilization Mechanisms A Comprehensive ReviewEditor IJTSRDNo ratings yet
- A Framework For User-Interfaces To DatabasesDocument11 pagesA Framework For User-Interfaces To DatabasesClariza PascualNo ratings yet
- Paper 5Document11 pagesPaper 5MangeshNo ratings yet
- Haen - 2012 - J. - Phys. - Conf. - Ser. - 396 - 052038Document11 pagesHaen - 2012 - J. - Phys. - Conf. - Ser. - 396 - 052038praveen gNo ratings yet
- Prediction in ProjectionDocument14 pagesPrediction in ProjectionSomsanouk MounnalathNo ratings yet
- A Review of Digital Twin For Vehicle Predictive Maintenance SystemDocument7 pagesA Review of Digital Twin For Vehicle Predictive Maintenance Systemkmlima69No ratings yet
- Complex PNT Distributed ControlDocument13 pagesComplex PNT Distributed ControlAntariksha PattnaikNo ratings yet
- Information and Software TechnologyDocument16 pagesInformation and Software TechnologyFelipe Ramirez HerreraNo ratings yet
- PC 1Document2 pagesPC 1digvijay.in9832No ratings yet
- On The Synthesis of SuperblocksDocument5 pagesOn The Synthesis of SuperblocksJ Christian OdehnalNo ratings yet
- Thesis WSNDocument6 pagesThesis WSNwcldtexff100% (2)
- Energy-Aware Distributed Simulation For Mobile Platforms: An Empirical StudyDocument21 pagesEnergy-Aware Distributed Simulation For Mobile Platforms: An Empirical StudyFahad MaqboolNo ratings yet
- Future Generation Computer Systems: Flavia C. Delicato, Adnan Al-Anbuky, Kevin I-Kai WangDocument6 pagesFuture Generation Computer Systems: Flavia C. Delicato, Adnan Al-Anbuky, Kevin I-Kai WangSirshendu AroshNo ratings yet
- A Container Scheduling Strategy Based On Machine Learning in Microservice ArchitectureDocument7 pagesA Container Scheduling Strategy Based On Machine Learning in Microservice Architecturegabriel.matos1201No ratings yet
- Robustness of Sequential CircuitsDocument15 pagesRobustness of Sequential CircuitsBhargavi PatilNo ratings yet
- A Secured Health Care Application Architecture For Cyber-Physical SystemsDocument8 pagesA Secured Health Care Application Architecture For Cyber-Physical SystemsFranco Martín LópezNo ratings yet
- Ilidrissi-Tan2019 Article ADeepUnifiedFrameworkForSuspicDocument6 pagesIlidrissi-Tan2019 Article ADeepUnifiedFrameworkForSuspicshivam sharmaNo ratings yet
- Jmse 11 01021Document32 pagesJmse 11 01021ravi_4908No ratings yet
- Fluids 06 00028Document19 pagesFluids 06 00028ravi_4908No ratings yet
- CALL-2021 Rhodes-DL1120-1020-2pgDocument2 pagesCALL-2021 Rhodes-DL1120-1020-2pgravi_4908No ratings yet
- Assignment 3 - NTFP&SLE (HNM AgFE IITKGP) - RERUN 2 (3) .NewDocument13 pagesAssignment 3 - NTFP&SLE (HNM AgFE IITKGP) - RERUN 2 (3) .NewDebasish Datta Research Scholar, Dept. of Biochem. Engg., IIT (BHU)No ratings yet
- BB 3002Document2 pagesBB 3002Leslie TaylorNo ratings yet
- Thin Film DepositionDocument34 pagesThin Film Depositionsenthil100% (2)
- DS-7204HI-VS Net DVR - V2.0 (080909)Document88 pagesDS-7204HI-VS Net DVR - V2.0 (080909)ANTONIO PEREZNo ratings yet
- Jotafloor: Traffic Deck SystemDocument12 pagesJotafloor: Traffic Deck SystemUnited Construction Est. TechnicalNo ratings yet
- Acer Iconia Tab W500 Pegatron EAB00 SchematicsDocument60 pagesAcer Iconia Tab W500 Pegatron EAB00 SchematicsIIIkwarkaNo ratings yet
- Health Group3Document29 pagesHealth Group3Angela OrenseNo ratings yet
- s1160 Jorvet Infusion PumpDocument4 pagess1160 Jorvet Infusion PumpGhulam HyderNo ratings yet
- 1 Stack Testing Source Policy - RA 8749 Legal Oct 2019 Updates - Engr. Jundy Del SocorroDocument80 pages1 Stack Testing Source Policy - RA 8749 Legal Oct 2019 Updates - Engr. Jundy Del SocorroJayson ResultayNo ratings yet
- Bubble Slabs Burned at 800 °C With Different Periods: IOP Conference Series: Materials Science and EngineeringDocument10 pagesBubble Slabs Burned at 800 °C With Different Periods: IOP Conference Series: Materials Science and Engineeringshilpa jacobNo ratings yet
- Material Balance & Energy Balance - Reactor-2Document32 pagesMaterial Balance & Energy Balance - Reactor-2Xy karNo ratings yet
- Rundown ICTSD 2018 - (Latest)Document9 pagesRundown ICTSD 2018 - (Latest)Annisa Farida HayuningsihNo ratings yet
- Loving Vincent: by Dorota KobielaDocument45 pagesLoving Vincent: by Dorota KobielaFairut CharrisNo ratings yet
- SGK Tieng Anh 9 Thi Diem Tap 1Document73 pagesSGK Tieng Anh 9 Thi Diem Tap 1Nhu NguyenNo ratings yet
- SEC - Connection Guidelines - v3 - CleanDocument54 pagesSEC - Connection Guidelines - v3 - CleanFurqan HamidNo ratings yet
- Le - 2 Sep. 2019: Reçuclt/Cih/IthDocument18 pagesLe - 2 Sep. 2019: Reçuclt/Cih/IthAlero ViteNo ratings yet
- GD - 202011 - G2 Inverter - Sungrow Single Phase Inverter Commissioning Guide - V1.0Document13 pagesGD - 202011 - G2 Inverter - Sungrow Single Phase Inverter Commissioning Guide - V1.0AbbasNo ratings yet
- Writing Good PI ObjectivesDocument42 pagesWriting Good PI Objectivesfrankiepaul06No ratings yet
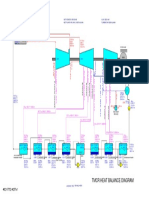
- 01 TMCR Heat Balance DiagramDocument1 page01 TMCR Heat Balance DiagramPrescila PalacioNo ratings yet
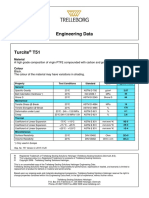
- Turcite T51 Engineering DataDocument1 pageTurcite T51 Engineering DataAntonio Rivera VillavicencioNo ratings yet
- Pipe Span ChartDocument1 pagePipe Span ChartazamshafiqNo ratings yet
- Assignment 33 PDFDocument9 pagesAssignment 33 PDFsayan mukherjeeNo ratings yet
- Reglas Digitales Mitutoyo Scale Units Linear ScalesDocument31 pagesReglas Digitales Mitutoyo Scale Units Linear ScalesAngelmambrinNo ratings yet
- 4K Resolution: The Future of ResolutionsDocument15 pages4K Resolution: The Future of ResolutionsRavi JoshiNo ratings yet
- FAB-3021117-01-M01-ER-001 - Rev-0 SK-01 & 02Document91 pagesFAB-3021117-01-M01-ER-001 - Rev-0 SK-01 & 02juuzousama1No ratings yet