You might also like
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (844)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5811)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1092)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (348)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- 10 Intermittentfault10Document94 pages10 Intermittentfault10libertyplusNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Interior Architecture Chapter 1-9Document493 pagesInterior Architecture Chapter 1-9Edward Que100% (4)
- Schlumberger Log Interpretation Charts PDFDocument187 pagesSchlumberger Log Interpretation Charts PDFMuhammad Frasetio PambudiNo ratings yet
- ShortSpec TopazDriller Rev8 PDFDocument2 pagesShortSpec TopazDriller Rev8 PDFBorysNo ratings yet
- Drill String RotaryDocument111 pagesDrill String RotaryAboZaidNo ratings yet
- Enquiry Routines PDFDocument27 pagesEnquiry Routines PDFabdalah said0% (1)
- RANGER 305g LincolnDocument6 pagesRANGER 305g LincolnWilfredoNo ratings yet
- Hyundai r260lc 9s Manual de TallerDocument617 pagesHyundai r260lc 9s Manual de TallerCamila Vergara Cortes100% (4)
- GEA Cassette-Geko DF KSDocument64 pagesGEA Cassette-Geko DF KSCatalin FrincuNo ratings yet
- PDF Multilayer Flexible Packaging Second Edition John R Wagner JR Ebook Full ChapterDocument53 pagesPDF Multilayer Flexible Packaging Second Edition John R Wagner JR Ebook Full Chaptermargaret.epperson776100% (3)
- Anna L. Mallam and Sophie E. Jackson - The Dimerization of An Alpha/beta-Knotted Protein Is Essential For Structure and FunctionDocument12 pagesAnna L. Mallam and Sophie E. Jackson - The Dimerization of An Alpha/beta-Knotted Protein Is Essential For Structure and FunctionKeomssNo ratings yet
- Geoffrey C. Rollins, Anton S. Petrov and Stephen C. Harvey - The Role of DNA Twist in The Packaging of Viral GenomesDocument3 pagesGeoffrey C. Rollins, Anton S. Petrov and Stephen C. Harvey - The Role of DNA Twist in The Packaging of Viral GenomesKeomssNo ratings yet
- Wolfram Mobius, Erwin Frey and Ulrich Gerland - Spontaneous Unknotting of A Polymer Confined in A NanochannelDocument4 pagesWolfram Mobius, Erwin Frey and Ulrich Gerland - Spontaneous Unknotting of A Polymer Confined in A NanochannelKeomssNo ratings yet
- Joanna I. Sułkowska, Piotr Sułkowski and Jose N. Onuchic - Jamming Proteins With Slipknots and Their Free Energy LandscapeDocument4 pagesJoanna I. Sułkowska, Piotr Sułkowski and Jose N. Onuchic - Jamming Proteins With Slipknots and Their Free Energy LandscapeKeomssNo ratings yet
- Jason Cantarella, Dennis DeTurck, Herman Gluck and Mikhail Teytel - Influence of Geometry and Topology On HelicityDocument15 pagesJason Cantarella, Dennis DeTurck, Herman Gluck and Mikhail Teytel - Influence of Geometry and Topology On HelicityKeomssNo ratings yet
- Joanna I. Sułkowska, Piotr Sułkowski, P. Szymczak and Marek Cieplak - Tightening of Knots in ProteinsDocument4 pagesJoanna I. Sułkowska, Piotr Sułkowski, P. Szymczak and Marek Cieplak - Tightening of Knots in ProteinsKeomssNo ratings yet
- SandiaModuleDatabase 20111114Document67 pagesSandiaModuleDatabase 20111114Yücel SenolNo ratings yet
- Esab Buddy Arc 145 Manual enDocument20 pagesEsab Buddy Arc 145 Manual enСтефан АнтонићNo ratings yet
- TUTU ReviewDocument6 pagesTUTU Reviewabudhabi.inbornNo ratings yet
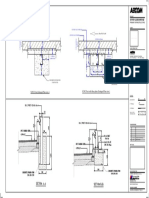
- Section Details (N2W2) PDFDocument1 pageSection Details (N2W2) PDFlibin513No ratings yet
- Is 1255Document87 pagesIs 1255Vivek KakkothNo ratings yet
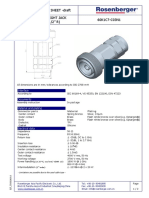
- Technical Data Sheet - Draft 7/16 Straight Jack (1/2'' R) 60K1C7-C03N1Document8 pagesTechnical Data Sheet - Draft 7/16 Straight Jack (1/2'' R) 60K1C7-C03N1nguyentraihdNo ratings yet
- Pt. Teknika Pesona KahayanDocument2 pagesPt. Teknika Pesona KahayanarafsudartaNo ratings yet
- Murray Mxua 19-21675 (881224-224)Document15 pagesMurray Mxua 19-21675 (881224-224)Yew Lim100% (1)
- ErrDocument1 pageErrJose Carlos Perumundo CordovezNo ratings yet
- Modeler User Guide BIZAGIDocument361 pagesModeler User Guide BIZAGIMARCEL0412No ratings yet
- As 2360.6.1-1993 Measurement of Fluid Flow in Closed Conduits Volumetric Methods - by MassDocument8 pagesAs 2360.6.1-1993 Measurement of Fluid Flow in Closed Conduits Volumetric Methods - by MassSAI Global - APACNo ratings yet
- Combustion of Coffee Husks: M. Saenger, E.-U. Hartge, J. Werther, T. Ogada, Z. SiagiDocument19 pagesCombustion of Coffee Husks: M. Saenger, E.-U. Hartge, J. Werther, T. Ogada, Z. SiagiPrakash WarrierNo ratings yet
- Triple Combination Tool String: DescriptionDocument2 pagesTriple Combination Tool String: DescriptionmuratNo ratings yet
- 201602151442319848Document62 pages201602151442319848வினோத் வீ100% (2)
- Magicwave 2200Document160 pagesMagicwave 2200djotenNo ratings yet
- Experiment #1 Final - Report - CODocument9 pagesExperiment #1 Final - Report - COEisen JaylordNo ratings yet
- ANSYS, Inc. Installation Guide For LinuxDocument96 pagesANSYS, Inc. Installation Guide For LinuxIan AsNo ratings yet
- BD131 and BD132 PDFDocument4 pagesBD131 and BD132 PDFAdolfo BetinNo ratings yet
- Kolor Kut Material Safety Data Sheet PDFDocument5 pagesKolor Kut Material Safety Data Sheet PDFJOELNo ratings yet
- COE - Forums - Calculate Total Area of Selected SurfaceDocument5 pagesCOE - Forums - Calculate Total Area of Selected SurfacezarasettNo ratings yet