You might also like
- Dynamic Search Algorithm Used in Unstructured Peer-to-Peer NetworksDocument5 pagesDynamic Search Algorithm Used in Unstructured Peer-to-Peer Networkssurendiran123No ratings yet
- Dynamic Search Algorithm in UnstructuredDocument13 pagesDynamic Search Algorithm in UnstructuredarunavangalaNo ratings yet
- Dept of C.S.E, A.P.S.C.E 2010-11Document30 pagesDept of C.S.E, A.P.S.C.E 2010-11Sridhar KulkarniNo ratings yet
- Traffic Locality 106Document11 pagesTraffic Locality 106Usman TariqNo ratings yet
- UBICC-submitted 206 206Document11 pagesUBICC-submitted 206 206Ubiquitous Computing and Communication JournalNo ratings yet
- RDMAR ProtocolDocument7 pagesRDMAR ProtocolSashwat PadhyNo ratings yet
- An Ns-2 Simulation Based Comparison of MANET Routing ProtocolsDocument7 pagesAn Ns-2 Simulation Based Comparison of MANET Routing Protocolssaurabh_kapoor2No ratings yet
- An Ns-2 Simulation Based Comparison of MANET Routing ProtocolsDocument7 pagesAn Ns-2 Simulation Based Comparison of MANET Routing ProtocolsSyams FathurNo ratings yet
- Minimum Hop Packet Forwarding for Mobile Ad Hoc Search AppsDocument14 pagesMinimum Hop Packet Forwarding for Mobile Ad Hoc Search Appssubtlecse1No ratings yet
- Performance Comparison of Two On-Demand Routing ProtocolsDocument4 pagesPerformance Comparison of Two On-Demand Routing ProtocolsSovan KarNo ratings yet
- Performance Assessment of Reactive Routing Protocols in Mobile Ad-Hoc Networks Under CBR Traffic Using Ns2Document4 pagesPerformance Assessment of Reactive Routing Protocols in Mobile Ad-Hoc Networks Under CBR Traffic Using Ns2vanpointNo ratings yet
- 1.2 Proactive Routing ProtocolsDocument4 pages1.2 Proactive Routing ProtocolsLoga LogananthamNo ratings yet
- Location-based spatial queries with peer-to-peer data sharingDocument10 pagesLocation-based spatial queries with peer-to-peer data sharingVijaySagar Chowdary NarisettiNo ratings yet
- MANET Routing Protocols Evaluation - AODV, DSR and DSDV PerspectiveDocument6 pagesMANET Routing Protocols Evaluation - AODV, DSR and DSDV Perspective33221044No ratings yet
- Vor-Tree: R-Trees With Voronoi Diagrams For Efficient Processing of Spatial Nearest Neighbor QueriesDocument12 pagesVor-Tree: R-Trees With Voronoi Diagrams For Efficient Processing of Spatial Nearest Neighbor QuerieszbizacaNo ratings yet
- Pervasive Computing and Mobile Application DevelopmentDocument6 pagesPervasive Computing and Mobile Application DevelopmentabrhamNo ratings yet
- Enhancing The Performance of AODV Protocol Using Bi-Model ApproachDocument5 pagesEnhancing The Performance of AODV Protocol Using Bi-Model ApproachMuthu Vijay DeepakNo ratings yet
- Dns PDFDocument14 pagesDns PDFmarcio oliveiraNo ratings yet
- IRCAR: Improved Reputation Based Context-Aware Routing Algorithm For Delay Tolerant NetworkDocument4 pagesIRCAR: Improved Reputation Based Context-Aware Routing Algorithm For Delay Tolerant Network87aditya87No ratings yet
- Fast and Secure Data Transmission by Using Hybrid Protocols in Mobile Ad Hoc NetworkDocument5 pagesFast and Secure Data Transmission by Using Hybrid Protocols in Mobile Ad Hoc NetworkNguyễn Đức ToànNo ratings yet
- Simulation and Analysis of AODV and AOMDV Protocol During Link Breakage in MANET Using NS-2Document6 pagesSimulation and Analysis of AODV and AOMDV Protocol During Link Breakage in MANET Using NS-2Zele WondeNo ratings yet
- Efficient Power-Aware Hybrid Routing Using Zoning For Ad Hoc NetworkDocument4 pagesEfficient Power-Aware Hybrid Routing Using Zoning For Ad Hoc NetworkSeptian Aji SNo ratings yet
- Performance Analysis of Proactive and Reactive Routing Protocols For Ad Hoc NetworksDocument4 pagesPerformance Analysis of Proactive and Reactive Routing Protocols For Ad Hoc NetworksVelu KuttyNo ratings yet
- Study of Distance Vector Routing Protocols For Mobile Ad Hoc NetworksDocument8 pagesStudy of Distance Vector Routing Protocols For Mobile Ad Hoc NetworksSai SaurabNo ratings yet
- Mehran - WONS (Gps Distance Related)Document14 pagesMehran - WONS (Gps Distance Related)Update BabuNo ratings yet
- Knowledge-Based Opportunistic Forwarding in Vehicular Wireless Ad Hoc NetworksDocument5 pagesKnowledge-Based Opportunistic Forwarding in Vehicular Wireless Ad Hoc NetworkstatarasanurazvanNo ratings yet
- Automated Re-Allocator of ReplicasDocument18 pagesAutomated Re-Allocator of ReplicasAIRCC - IJCNCNo ratings yet
- Notes of ManetDocument7 pagesNotes of ManetAdilNasirNo ratings yet
- A Survey of RDB-RDF Approaches - ToolsDocument24 pagesA Survey of RDB-RDF Approaches - ToolsParamita MayadewiNo ratings yet
- Comparison of Effectiveness of Aodv, DSDV and DSR Routing Protocols in Mobile Ad Hoc NetworksDocument4 pagesComparison of Effectiveness of Aodv, DSDV and DSR Routing Protocols in Mobile Ad Hoc NetworksAlwarsamy RamakrishnanNo ratings yet
- Exp 3Document6 pagesExp 3Chaimae ELHAMAMINo ratings yet
- Performance Evaluation of SQL and Nosql Database Management Systems in A ClusterDocument24 pagesPerformance Evaluation of SQL and Nosql Database Management Systems in A ClusterMaurice LeeNo ratings yet
- Simulation of AODV Under Blackhole Attack in ManetDocument5 pagesSimulation of AODV Under Blackhole Attack in Maneteditor_ijarcsseNo ratings yet
- Delay Aware Reactive Routing Protocols For QoS in MANETs A ReviewDocument7 pagesDelay Aware Reactive Routing Protocols For QoS in MANETs A ReviewS AdamNo ratings yet
- Rdfpeers: A Scalable Distributed RDF Repository Based On A Structured Peer-To-Peer NetworkDocument8 pagesRdfpeers: A Scalable Distributed RDF Repository Based On A Structured Peer-To-Peer NetworklemarsuNo ratings yet
- An Algorithm For Crypto Analysis in ManetDocument4 pagesAn Algorithm For Crypto Analysis in Maneteditor_ijarcsseNo ratings yet
- 06620073Document4 pages06620073pallavipuchiNo ratings yet
- UBICC-Submitted 206 206Document11 pagesUBICC-Submitted 206 206Usman TariqNo ratings yet
- Node-Centric Hybrid Routing For Ad Hoc Networks: Soumya Roy and J.J.Garcia-Luna-AcevesDocument11 pagesNode-Centric Hybrid Routing For Ad Hoc Networks: Soumya Roy and J.J.Garcia-Luna-Acevessantana_bestNo ratings yet
- Acquisition in Wireless Sensor Networks: Directed Diffusion vs Pseudo-Distance Data DisseminationDocument13 pagesAcquisition in Wireless Sensor Networks: Directed Diffusion vs Pseudo-Distance Data DisseminationNurafni Nur Natsir AliaNo ratings yet
- A Comparison Study of Qos Using Different Routing Algorithms in Mobile Ad Hoc NetworksDocument4 pagesA Comparison Study of Qos Using Different Routing Algorithms in Mobile Ad Hoc NetworksEEE_ProceedingsNo ratings yet
- Resource Discovery Mechanisms For Peer-To-Peer SystemsDocument5 pagesResource Discovery Mechanisms For Peer-To-Peer SystemsJeannette FrazierNo ratings yet
- Drivers Proactive Routing ProtocolDocument15 pagesDrivers Proactive Routing ProtocolBasit KhanNo ratings yet
- Data Variation Analysis of QOS in Mobile Adhoc NetworkDocument3 pagesData Variation Analysis of QOS in Mobile Adhoc NetworkIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalNo ratings yet
- Dynamic Search Algorithm Improves P2P Network PerformanceDocument3 pagesDynamic Search Algorithm Improves P2P Network PerformanceSneha IndapureNo ratings yet
- Comparing Routing Protocols for Large-Scale Wireless MANETsDocument6 pagesComparing Routing Protocols for Large-Scale Wireless MANETsManoharNo ratings yet
- Efficient Distributed Locality Sensitive Hashing: Bahman Bahmani Ashish Goel Rajendra ShindeDocument5 pagesEfficient Distributed Locality Sensitive Hashing: Bahman Bahmani Ashish Goel Rajendra ShindeKhaoula HassouneNo ratings yet
- Geographical Routing Using Partial Information For Wireless Ad Hoc NetworksDocument10 pagesGeographical Routing Using Partial Information For Wireless Ad Hoc NetworksNigel LiangNo ratings yet
- Performance Comparison of TCP Variants o PDFDocument8 pagesPerformance Comparison of TCP Variants o PDFMuhammad Munib Abid AqeelNo ratings yet
- The Performance Evaluation of Genetic Zone Routing Protocol For ManetsDocument22 pagesThe Performance Evaluation of Genetic Zone Routing Protocol For ManetsJamuna ShreeNo ratings yet
- A Comparison Study of DSDV and Sead Wireless Ad Hoc Network Routing ProtocolsDocument5 pagesA Comparison Study of DSDV and Sead Wireless Ad Hoc Network Routing ProtocolsIjesat JournalNo ratings yet
- Black Hole AttackDocument7 pagesBlack Hole AttackAbdulrasheed Ibrahim OpeyemiNo ratings yet
- Message Drop and Scheduling in DTNS: Theory and PracticeDocument15 pagesMessage Drop and Scheduling in DTNS: Theory and PracticeAjay KumarNo ratings yet
- A Study On Ad Hoc On Demand Distance Vector AODV ProtocolDocument3 pagesA Study On Ad Hoc On Demand Distance Vector AODV ProtocolEditor IJTSRDNo ratings yet
- Comparison of AODV and DSR routing protocols using Group Mobility ModelDocument4 pagesComparison of AODV and DSR routing protocols using Group Mobility ModelChandani AnandNo ratings yet
- 1.1 Mobile Ad Hoc NetworkDocument42 pages1.1 Mobile Ad Hoc NetworkGokulNo ratings yet
- Bas Agni 98 DreamDocument9 pagesBas Agni 98 DreamRamesh InampudiNo ratings yet
- Advanced Delay Reduction Algorithm Based On GPS With Load BalancingDocument12 pagesAdvanced Delay Reduction Algorithm Based On GPS With Load BalancingijdpsNo ratings yet
- Manet AssignmentDocument5 pagesManet AssignmentHolly AndersonNo ratings yet
- Library Management SystemDocument15 pagesLibrary Management SystemarakaviNo ratings yet
- Mpesa Transaction HistoryDocument12 pagesMpesa Transaction HistoryMadeleiGOOGYXNo ratings yet
- Paper Windy Aristiani PDFDocument8 pagesPaper Windy Aristiani PDFjasmineNo ratings yet
- Tema 4Document2 pagesTema 4Nicole DelgadoNo ratings yet
- 4D Construction Sequence Planning - New Process and Data Model PDFDocument6 pages4D Construction Sequence Planning - New Process and Data Model PDFel_residenteNo ratings yet
- ConversionDocument4 pagesConversionBernard Garcia OrihuelaNo ratings yet
- Dynamic PricingDocument9 pagesDynamic PricingkoolboyankitNo ratings yet
- Sap Scripts Tutorial PDFDocument89 pagesSap Scripts Tutorial PDFdamljanovic100% (2)
- Competitive Intelligence and The WebDocument13 pagesCompetitive Intelligence and The WebChaimaa ElNo ratings yet
- Unit-1 (Part A) : Semester Vi Question Bank Cryptography and Network SecurityDocument3 pagesUnit-1 (Part A) : Semester Vi Question Bank Cryptography and Network SecurityMAITRI PATELNo ratings yet
- Chapter 4 SI WorksheetDocument5 pagesChapter 4 SI WorksheetFoster PerryNo ratings yet
- Python Tutorial - A Complete Guide To Learn Python ProgrammingDocument25 pagesPython Tutorial - A Complete Guide To Learn Python ProgrammingIVYLEAGUE123456No ratings yet
- ADT ListDocument3 pagesADT ListCicio FlaviuNo ratings yet
- RadioDJ - How To Use A Mixer With RadioDJ - RadioDJ - Free Radio Automation SoftwareDocument2 pagesRadioDJ - How To Use A Mixer With RadioDJ - RadioDJ - Free Radio Automation SoftwarePatito FeoNo ratings yet
- DarkBASIC NotesDocument48 pagesDarkBASIC NotesAnonymous DXiWbSNNo ratings yet
- Machine Learning and Finance IDocument70 pagesMachine Learning and Finance ITraderCat SolarisNo ratings yet
- Paperwork Simulation PacketDocument11 pagesPaperwork Simulation PacketHadi P.No ratings yet
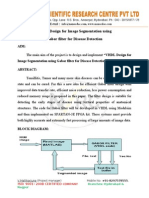
- VHDL Design For Image Segmentation Using Gabor Filter For Disease DetectionDocument3 pagesVHDL Design For Image Segmentation Using Gabor Filter For Disease DetectionNsrc Nano ScientifcNo ratings yet
- RFCMDocument220 pagesRFCMAkella Ramana KumarNo ratings yet
- Blockchain Application On Financial Sector in The FutureDocument12 pagesBlockchain Application On Financial Sector in The FutureVincent RinaldyNo ratings yet
- Mainframe ManualDocument194 pagesMainframe ManualtejusanghaviNo ratings yet
- Syllabus IBADocument1 pageSyllabus IBAK.m.khizir AhmedNo ratings yet
- Personalizing Mahara Views With Custom SkinsDocument9 pagesPersonalizing Mahara Views With Custom SkinsGregor AnželjNo ratings yet
- Accounting Controls and ProcessesDocument31 pagesAccounting Controls and Processesnavie VNo ratings yet
- Lal Kitab Vol3 1952 Hindi Edition RppandeyDocument143 pagesLal Kitab Vol3 1952 Hindi Edition RppandeyGaurav Kohli0% (1)
- Nokia CodesDocument1 pageNokia CodesindianwalaNo ratings yet
- Doli SQLDocument102 pagesDoli SQLChebbi MedNo ratings yet
- Roles On Agile Teams: From Small To Large Teams: SearchDocument5 pagesRoles On Agile Teams: From Small To Large Teams: SearchKrishna PandeyNo ratings yet
- About TCS Cloud PlusDocument4 pagesAbout TCS Cloud Pluskmanikannan1977_7427No ratings yet
- 70-411 R2 Test Bank Lesson 16Document11 pages70-411 R2 Test Bank Lesson 16Mazaher MohamedaliNo ratings yet