(Preprint) Iaa-Aas-Dycoss1-11-05: Mauro Pontani and Paolo Teofilatto
Uploaded by
Kartik Shankar(Preprint) Iaa-Aas-Dycoss1-11-05: Mauro Pontani and Paolo Teofilatto
Uploaded by
Kartik Shankar1
SIMPLE METHOD FOR PERFORMANCE EVALUATION
OF MULTISTAGE ROCKETS
Mauro Pontani
*
and Paolo Teofilatto
Multistage rockets are commonly employed to place spacecraft and satellites in
their operational orbits. Performance evaluation of multistage rockets is aimed at
defining the maximum payload mass at orbit injection, for specified structural,
propulsive, and aerodynamic data of the launch vehicle. This work proposes a
simple method for a fast performance evaluation of multistage rockets. The
technique at hand is based on three steps: (i) the flight path angle at each stage
separation is guessed, (ii) the spacecraft velocity is maximized at the first and
second stage separation, and (iii) for the last stage the thrust direction is obtained
through the particle swarm optimization technique, in conjunction with the use
of the Euler-Lagrange equations and the Pontryagin minimum principle. The
coast duration at the second stage separation is optimized as well. The method at
hand is intended to generate a near optimal trajectory through a simple, easy-to-
implement approach, with the final intent of obtaining a rapid evaluation of the
performance of a specified multistage launch vehicle, with reference to different
operational orbits.
INTRODUCTION
Multistage rockets are commonly employed to place spacecraft and satellites in their opera-
tional orbits. Performance evaluation of multistage rockets is basically aimed at defining the
maximum payload mass that can be inserted in the desired orbit. Usually, if the rocket character-
istics are specified, this evaluation is obtained from optimizing the rocket trajectory, i.e. by de-
termining the optimal control law that leads to maximizing the final mass at orbit injection. In
general, the numerical solution of aerospace trajectory optimization problems is not trivial and
has been pursued with different approaches in the past. Indirect methods, such as the gradient-
restoration algorithm
1,2
and the shooting method
3
, or direct techniques, such as direct colloca-
tion
4,5
, direct transcription
6,7
, and differential inclusion
8,9
, are to name a few. However, only a
relatively small number of publications are concerned with trajectory optimization of multistage
launch vehicles
1,2,10,11
.
This work is concerned with a novel approach that is intended to allow a fast performance
evaluation of multistage rockets with given characteristics, under some simplifying assumptions.
The technique described in this work is applied to a three-stage rocket, whose three-dimensional
*
PhD in Aerospace Engineering, Research Assistant, Scuola di Ingegneria Aerospaziale, University of Rome La
Sapienza, via Salaria 851/881, 00138 Rome, Italy
Professor of Flight Mechanics, Scuola di Ingegneria Aerospaziale, University of Rome La Sapienza, via Salaria
851/881, 00138 Rome, Italy
(Preprint) IAA-AAS-DyCoSS1-11-05
2
trajectory is composed of the following thrust phases and coast arcs:
(a) first stage propulsion
(b) second stage propulsion
(c) coast arc (after the second stage separation)
(d) third stage thrust phase
In particular, the methodology presented and applied in this paper is based on three steps:
(1) the flight path angle at each stage separation is determined through an iterative process;
(2) for each stage, the native MATLAB routine fmincon is employed for finding the thrust
direction that maximizes the velocity at the stage separation, at which the flight path
angle is constrained to the value found at step (1);
(3) for the third stage, the existence and duration of a coast arc and the optimal thrust
direction are determined through a heuristic technique, i.e. the particle swarm algorithm.
The Euler-Lagrange equations and the Pontryagin minimum principle are employed to
express the control as a function of the adjoint variables conjugate to the dynamics
equations.
The method that is being presented requires a reduced deal of effort in programming,
debugging, and testing the algorithmic codes, as existing routines are used, in conjunction with
analytical developments and a simple implementation of swarming algorithm. Nevertheless, the
trajectories yielded through the technique at hand resemble (qualitatively) the ones found by
Miele
2
and those of existing rockets as the Scout
12
. Hence, the methodology treated in this paper
is intended to: (i) yield a reasonable solution for performance evaluation of multistage rockets and
(ii) represent a technique for generating a suitable first-attempt guess trajectory to be employed
by more refined algorithms tailored to optimizing the overall trajectory.
PROBLEM DEFINITION
This research addresses the problem of performance evaluation of multistage rockets through
the determination of a near optimal ascending trajectory, which terminates at injection of the
payload in the desired operational orbit. This is a circular orbit of radius
d
R , inclination
d
i , and
right ascension of the ascending node (RAAN)
d
. The three-stage launch vehicle is modeled as
a point mass, in the context of a three-degree-of-freedom problem.
Rocket characteristics
The three-stage rocket that is being considered is the Muralm missile. It has specified
structural, propulsive, and aerodynamic characteristics.
For the sake of simplicity, the mass distribution of the launch vehicle can be described in
terms of masses of subrockets: subrocket 1 is the entire rocket, including all the three stages,
subrocket 2 is the launch vehicle after the first stage separation, subrocket 3 is the launch vehicle
after separation of the first two stages, and therefore is represented by the third stage only. Let
( )
0
i
m denote the initial mass of subrocket i. This mass
( )
0
i
m is composed of a structural mass
( ) i
S
m ,
a propellant mass
( ) i
P
m , and a payload mass
( ) i
U
m (
( ) ( ) ( ) ( )
0
i i i i
S P U
m m m m = + + ). For the first two
subrockets
( ) i
U
m ( 1, 2 i = ) coincides with the initial mass of the subsequent subrocket (i.e.
( ) ( ) 1
0
i i
U
m m
+
). With regard to the third subrocket
( ) 3
U
m is the (actual) payload mass, which is to be
maximized. The mass distribution for the Muralm three-stage rocket is the following:
3
( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
1 1 1 1
0
2 2 2 2
0
3608 kg 306 kg 2480 kg 822 kg
822 kg 46 kg 370 kg 406 kg
S P U
S P U
m m m m
m m m m
= = = =
= = = =
(1)
The initial mass of the third stage is specified and this implies that minimizing the third stage
propellant expenditure implies maximizing the payload mass that can be injected in the desired
orbit.
The propulsive characteristics of the launch vehicle can be described in terms of thrust
magnitude T and specific impulse
SP
I . Both these quantities are assumed as time-independent for
all of the stages. If the superscript
( ) j
( ) 1, 2, 3 j = refers to stage j, the following propulsive data
characterize the Muralm rocket:
( ) ( ) ( )
( ) ( ) ( )
1 2 3
1 2 3
235180 N 23472 N 7500 N
290 sec 291 sec 320 sec
SP SP SP
T T T
I I I
= = =
= = =
(2)
For each subrocket i it is then straightforward to derive the thrust acceleration as a function of the
time t:
( )
( ) ( )
( )
( )
( )
0
0 0
1
i
i i i
i
ign SP
n T
m
n t t g I
| |
=
|
\
(3)
where
( )
0
i
n is the thrust acceleration at ignition of stage i (which occurs at the time
( ) i
ign
t ) and
0
g is
the gravitational acceleration at sea level. Lastly, due to the specified mass distribution, the
burnout times
( ) i
BO
t for the first two subrockets ( 1, 2 i = ) are given by
( )
( )
( )
( )
( )
0
0 0
i i
i
SP P
BO
i i
g I m
t
n m
= (4)
The aerodynamics of the Muralm rocket has been modeled through the Missile DATCOM
database. The aerodynamic force is assumed to be composed of two terms, lift L and drag D,
( )
( )
( )
( ) 2 2
1 1
, and ,
2 2
i i
L A D A
L c M S v D c M S v = = (5)
where the lift and drag coefficients
L
c and
D
c depend on M and , i.e. Mach number and angle
of attack, respectively.
( ) i
S is the reference surface area for subrocket i,
A
is the (local)
atmospheric density, and v is the relative velocity (cf. Appendix 1). For the Muralm launch
vehicle
( )
( )
2
0.636 m 1, 2, 3
j
S j = = .
Equations of motion
The equations of motion that govern the rocket dynamics can be conveniently written in terms
of its radius r, (geographical) longitude , latitude , flight path angle , velocity v, and head-
ing angle . These variables refer to the relative motion in an Earth-centered rotating frame
(ECEF) and are described in more detail in Appendix 1. They form the state vector
4
[ ]
( )
T
R
r v x of the launch vehicle (in rotating coordinates). Omitting the su-
perscript
( ) i
, for each subrocket the equations of motion are
sin r v =
(6)
cos cos
cos
v
r
(7)
cos sin v
r
=
(8)
( )
2
2
sin
cos cos 2 cos cos cos sin sin sin
T E E
E
r T v L
m v r r v mv v
(
| |
= + + + + +
( |
\
(9)
( )
2
2
cos
sin cos cos sin sin cos sin
T E
E
T D
v r
m v r m
= + (10)
2
tan cos cos 2 cos tan sin sin cos cos 2 sin
cos
E
E E
r v
r v
= +
(11)
where
( )
3 2
398604.3 km sec
E
= and
( )
5 -1
7.292115 10 sec
E
= are the Earth gravitational
parameter and rotation rate, respectively, L and D are given by Eq. (5), and the time-varying mass
is
( ) ( ) ( )
( )
( )
( ) 0 0
i i i i
ign SP
m m T t t g I = . As the thrust vector is assumed to be coplanar with the posi-
tion vector r and the velocity vector v, the angle
T
suffices to define its direction, which is taken
counterclockwise from v. The state
R
x is continuous across stage separations, which occur at
time
1
t (first stage separation) and
2
t (second stage separation).
Since the Muralm is assumed to be air-launched from a Tornado fighter, the initial conditions
for Eqs. (6)-(11) are the following:
( ) ( ) ( ) ( ) ( ) ( )
0 0 0
0 0 0 0 0 0
2
E L L L
r R h v v
= + = = = = = (12)
where
0
h ,
0
, and
0
v are the rocket altitude, flight path angle and (relative) velocity at release
from the carrier aircraft.
L
,
L
,
L
represent respectively the latitude, azimuth, and (geographi-
cal) longitude at release. ( ) 6378.165 km
E
R = is the Earth radius. For the problem at hand the
following data are assumed:
0 0 0
6.7 km 52.6 deg 5.2 deg 35.0 deg 0.280 km sec
L L
h v = = = = = (13)
The azimuth at release
L
is determined in relation with the desired orbit inclination (cf. next
section).
5
METHOD OF SOLUTION
This work employs two distinct approaches for determining the trajectory of the first two
stages and that of the last stage. The orbital plane selection is assumed to occur during the pow-
ered motion of the first two subrockets. Moreover, for the upper stage aerodynamic forces are
negligible, and therefore they are not considered. These circumstances imply that the trajectory of
the last stage is planar.
Trajectory of the first two stages
The determination of the trajectory of the first two stages is based on maximizing the final ve-
locity at each stage separation, at which the flight path angle is constrained to a specified value.
The control is represented by the thrust direction, defined by
T
, and by the aerodynamic angle
of attack, . However, as the thrust direction is always aligned with the rocket longitudinal axis,
these two angles coincide:
T
.
While ( )
1
t is set to 30 deg, the flight path angle at the second stage separation, ( )
2
t , is ad-
justed iteratively up to obtaining an apogee altitude in the range [ ] ,
d d
h h h , where
d
h is the
altitude of the desired circular orbit, and h is set to 10 km. The first-attempt value for ( )
2
t is
chosen to be 25 deg.
The orbit inclination is selected through a simultaneous iterative process on the initial azimuth
at rocket release. This process is relatively straightforward. In fact, in the range [0, 2] the orbit
inclination increases as
L
decreases (for 2
L
). Convergence is declared when inclination
is in the range [ ] ,
d d
i i i i + , where i is set to 3 deg . At each iteration of the process (for
given values of ( )
1
t , ( )
2
t , and
L
), the MATLAB routine fmincon determines the angle ( ) t
that maximizes v at each stage separation.
Finally, the correct selection of the release time
L
t leads to obtaining the desired right ascen-
sion of the ascending node (RAAN),
d
. In fact,
L
t is directly related to the Greenwich sidereal
time at release
gL
,
( )
gL g E L
t t = +
(14)
where
g
is the (known) Greenwich absolute longitude at a reference time t . The RAAN is
given by the relations reported in Appendix 2 and, once the rocket final state (at orbit injection) is
known, specifying the RAAN leads to obtaining
gL
and then
L
t :
( )
2
gL g
L
E
k
t t k
+
= + Z (15)
At separation of the second stage, the state is denoted with ( )
2 R
t x . Through the relations re-
ported in Appendix 2 ( )
2 R
t x is employed to derive the inertial state, denoted with ( )
2 I
t x and
including the following components: radius r, absolute longitude
I
, latitude , inertial flight
path angle
I
, inertial velocity
I
v , and inertial heading angle
I
. Then ( )
2 I
t x is employed to
6
derive the orbital elements at
2
t , i.e. the orbit semi-major axis (SMA)
2
a , eccentricity
2
e , incli-
nation i, RAAN , argument of perigee
2
, and true anomaly ( )
2
f t (cf. Appendix 2).
Trajectory of the last stage
As remarked previously, the last stage trajectory is assumed to be planar. This circumstance
implies that the orbit inclination and RAAN do not change during the last stage propulsion.
The third stage trajectory is assumed to be composed of two phases: a coast arc and a thrust
phase. It is relatively straightforward to prove that during the coast arc the true anomaly variation,
denoted with f , suffices to describe the rocket dynamics. In fact, if
3
t represents the ignition
time of the third state, then ( ) ( )
3 3 2
f f t f t f = + . The orbital elements
2
a ,
2
e , and
2
do not
vary along a coast arc. As a result the radius, inertial velocity and inertial flight path angle at
3
t
are simply given by
( )
( )
2
2 2
3
2 3
1
1 cos
a e
r t
e f
=
+
(16)
( )
2 3
3
2 3
sin
arctan
1 cos
I
e f
t
e f
(
=
(
+
(17)
( )
( )
2
3 2 2 3
2
2 2
1 2 cos
1
E
I
v t e e f
a e
= + +
(18)
In the powered phase, the third stage motion can be conveniently described through the use of the
equations of motion for r,
I
v , and
I
(also referred to as the state equations hence forward):
2 2
cos sin
sin sin cos
I E I I E
I I I I I I
I I I
v T T
r v v
m v r m v r r v
| |
= = = +
|
\
(19)
The thrust direction is now specified through the thrust angle
I
, taken counterclockwise from
the direction of the inertial velocity vector
I
v . The operational orbit is assumed to a be circular
orbit of radius
d
R . This means that the final conditions at orbit injection (which occurs at
f
t ) are
( ) ( ) ( )
0
E
f d I f I f
d
r t R v t t
R
= = =
(20)
The trajectory for the last stage is obtained by minimizing fuel consumption, which is equivalent
to minimizing the thrust duration. Hence, the objective function for the third stage trajectory op-
timization is
3 f
J t t =
(21)
7
In summary, the optimization problem for the upper stage is the following: determine the optimal
control law ( )
I
t and the optimal true anomaly
3
f such that J is minimized. The ignition time
3
t
is then calculated through the Keplers law:
( ) ( ) ( ) ( ) { }
3
2
3 2 3 2 2 3 2 2
sin sin
E
a
t t E t E t e E t e E t
= + ( + (
(22)
where ( )
k
E t is the eccentric anomaly associated with ( ) ( ) 2, 3
k
f t k = .
Letting [ ]
1 2 3
T T
I I
x x x r v = (
x , to obtain the necessary conditions for an optimal
solution a Hamiltonian H and a function of the boundary conditions are introduced as
2
1 2 3 2 3 3 3 2 2
2 1 2 1 1 2
cos sin
sin sin cos
I E I E
x T T
H x x x x
m x x m x x x x
( ( | |
+ + +
( | (
\
(23)
( )
( )
( )
2
2 2
2
3 1 10 2 20 2 2 3
2
2 3 2 2
2 3
3 30 4 1 5 2 6 3
2 3
1
1 2 cos
1 cos 1
sin
arctan
1 cos
E
f
E
f d f f
d
a e
t t x x e e f
e f a e
e f
x x R x x
e f R
( (
( ( + + + +
+ ( (
( (
( + + + +
( (
+
(
(24)
where ( )
0 3 k k
x x t = and
( ) ( ) 1, 2, 3
kf k f
x x t k = = ; [ ]
( ) 1 2 3
T
and
[ ]
( ) 1 2 3 4 5 6
T
represent respectively the adjoint variable conjugate to the
dynamics equations (19) and to the boundary conditions (16)-(18) and (20). The necessary condi-
tions for optimality
13
yield the following adjoint equations for the costate [ ]
( ) 1 2 3
T
:
( )
3
1 2 3 3 2 3 3 2 3
1 2 1
cos 1 1
cos 2 sin 2
E E
x
x x x
x x x
| |
= +
|
\
(25)
2 1 3 3 3 2 2 2
1 1 2 2
1
sin cos sin
E P
I
P
T
x x
x x x m x
( | |
= +
( |
\
(26)
3 2
3 2 1 3 2 3 3 2 2
1 1 1 2
cos
cos sin
E
E
x x
x x x
x x x x
| |
= + +
|
\
(27)
in conjunction with the respective boundary conditions:
( )
0 3
and 1, 2,3
k k kf k
k
+
= = =
(28)
In the presence of initial conditions depending on a parameter ( )
3
f a pair of additional necessary
conditions must hold
14
:
8
2
2
3 3
0 and 0
f f
=
(29)
The first equation yields a relation that expresses
30
as a function of
10
,
20
, and
3
f :
( )
( )
2
2 2
2 2
3 2 2 3 2 2 3
30 20 10 2
2 3 2 3
2 3
1
sin 1 2 cos 1 2 cos
cos cos
1 cos
a e
f e e f e e f
e f e f
e f
+ + + +
=
+ +
+
(30)
In addition, the optimal control
*
I
can be expressed as a function of the costates through the
Pontryagin minimum principle:
1 1
2 2
2 2
* * 2 * 2 3 3 3
2 2 2
2 2 2
argmin sin and cos
I
I I I
H
x x x
( (
| | | |
( ( = = + = +
| |
( (
\ \
(31)
Lastly, as the final time is unspecified, the following transversality condition must hold:
( )
( )
( )
( )
( )
( )
2
3
2
3
0
2
3 3
2
0 3 0
0 1 0
1
f
f f
f f
f SP
n
H t
t x
n t t g I
( + = + =
(
(
(32)
The necessary conditions for optimality allow translating the optimal control problem into a two-
point boundary-value problem involving Eqs. (25)-(32), with unknowns represented by the initial
values of ,
3
f , and
f
t .
Equality constraints reduce the search space where feasible solutions can be located. However,
what will be demonstrated is that for the problem at hand the transversality condition can be ne-
glected by the swarming algorithm. To do this, one has first to recognize the special structure of
the costate equations (25)-(27), which are homogeneous in . This circumstance implies that if
an optimization algorithm is capable of finding some initial value of such that
( ) ( )
*
1 1
0 0 , k
= ( ) ( )
*
2 2
0 0 , and k
= ( ) ( )
*
3 3
0 0 k
= ( ) 0 k
> (where the superscript * de-
notes the actual optimal value of a variable), then the same proportionality holds between and
*
at any t, due to homogeneity of Eqs. (25)-(27). Moreover, the control
I
can be written as a
function of through Eq. (31) and one can recognize that
I
coincides with
*
I
:
( )
1 1
2 2
2 2
* *
2
2 * * 3 3 3 3
2 2
2 2 2 2
sin sin
I I
k k
k
x x x x
( (
| | | |
( ( = + = +
| |
( (
\ \
(33)
( )
1 1
2 2
2 2
*
2
2 * * * 3 3
2 2 2 2
2 2
cos cos
I I
k
k k
x x
( (
| | | |
( ( = + = +
| |
( (
\ \
(34)
9
This circumstance implies that if is proportional to
*
then the final conditions are fulfilled at
the minimum final time
*
f
t . In contrast, the transversality condition is violated, because the value
of
( )
*
f
H t , due to Eq. (32), turns out to be
( )
( )
( )
( )
( )
( )
2
3
2
3 * 0
2
3 3 * *
2
0 3 0
1
1
f
f f
f
f SP
n
H t k
x
n t t g I
(
( = + =
(
(
(35)
Therefore, provided that the proportionality condition holds, the optimal control
*
I
can be de-
termined without considering the transversality condition, which in fact is ignorable in this con-
text. Thus, this condition is discarded, in order to reduce the number of equality constraints con-
sidered by the swarming algorithm, with the intent of improving its performance.
In short, the following parameter set can be employed in the solution process:
{ }
10 20 3
, , ,
f
f t .
The remaining parameter
30
can be easily obtained by means of the relation (30). Specifically,
the swarming technique is based on the following points:
(a) the control variable is expressed as a function of the costate through Eq. (31)
(b) the value of
30
is calculated by means of Eq. (30), after picking the unknown values of the
remaining Lagrange multipliers at the initial time ( )
10 20
and , and the true anomaly
3
f
(c) the state equations (19) are integrated numerically up to the final time
f
t , together with the
adjoint equations (25)-(27). The respective initial conditions are known once the parameters
3
f (for the state equations) and { }
10 20 30
, , (for the adjoint equations) are specified
(d) the inequality in Eq. (29) (not expanded for the sake of brevity) and the conditions at injec-
tion (20) are evaluated
In summary, the problem reduces to the determination of four unknown parameters,
{ }
10 20 3
, , ,
f
f t , that lead the dynamical system to satisfying three conditions (Eqs. (20)).
Outline of the particle swarm optimization method
The particle swarm optimization (PSO) method is a heuristic technique aimed at finding the
optimal values of a set of unknown parameters, for a generic dynamical system. In this research
the optimization problem involves a continuous time-dependent control variable and is translated
into a parameter optimization problem through the necessary conditions for optimality, which
allow expressing the control variable as a function of the adjoint variables conjugate to the dy-
namics equations.
Unconstrained parameter optimization problems can be stated as follows: determine the opti-
mal values of the n unknown parameters { }
1
, ,
n
such that the objective function J is mini-
mized. The PSO technique is a population-based method, where the population is represented by
a swarm of N particles. Each particle i ( ) 1, , i N = is associated with a position vector ( ) i and
with a velocity vector ( ) i w . The position vector includes the values of the n unknown parameters
of the problem, ( ) ( ) ( )
1
T
n
i i i (
, whereas the velocity vector, whose components are
10
denoted with ( ) ( ) 1, ,
k
w i k n = , determines the position update. Both the position and the ve-
locity components are constrained to suitable ranges:
( ) and 1, ,
k k k k k k
a b d w d k n = (36)
where
k k k
d b a . Each particle represents a possible solution to the problem, and corresponds
to a specific value of the objective function. The expressions for position and velocity update de-
termine the swarm evolution toward the location of the globally optimal position, which corre-
sponds to the globally optimal solution to the problem of interest. The initial population is ran-
domly generated by introducing N particles, whose positions and velocities are (stochastically)
uniformly distributed in the respective search spaces, defined by Eq. (36). The algorithm termi-
nates when the maximum number of iterations
IT
N is reached. The position vector of the best
particle is expected to contain the optimal values of the unknown parameters, which correspond
to the global minimum of J. A fairly large number of iterations are set to ensure that the final so-
lution is stable enough to be considered optimal. The central idea underlying the method is con-
tained in the formula for velocity updating. This formula includes three terms with stochastic
weights: the first term is the so called inertial component and for each particle is proportional to
its velocity in the preceding iteration; the second component is termed the cognitive component,
directed toward the personal best position, i.e. the best position experienced by the particle; and
finally the third term is the social component, directed toward the global best position, i.e. the
best position yet located by any particle in the swarm. A detailed description of the algorithm
(with also the same settings adopted in this work) is contained in Reference 15.
Constrained optimization problems involve equalities and/or inequalities, regarding (directly
or indirectly) the unknown parameters. Equality constraints narrow considerably the search space
where feasible solutions can be located. This is due to the fact that (non-redundant) equality con-
straints actually reduce the degree of freedom of the problem according to their number. In fact,
m equality constraints reduce the degree of freedom by m. Therefore, in the presence of n un-
known parameters, at most m n = equality constraints are admissible ( ) m n : ( ) 0
r
l =
( ) 1, , r m = . The most popular approach for dealing with these constraints consists in penalizing
them by adjoining additional terms to the objective function:
( )
2
1
m
r r
r
J J l
=
= +
(37)
This approach is employed also in this research, with ( ) 1 1, 2, 3
r
r = = . The equality constraints
are represented by the relations (20). As the necessary conditions for optimality are used to ex-
press the control variable, the PSO assumes as objective the expression (37) with 0 J . Inequal-
ity constraints are less problematic because they reduce the search space of feasible solutions
without decreasing the degree of freedom of the problem. For each particle the simplest way of
treating inequality constraints consists in assigning a fictitious infinite value to the objective func-
tion if the particle violates at least one of them. In this work a single inequality constraint exists,
i.e. the second relation reported in Eq. (29). Further options exist for dealing with constraints
(e.g., methods based on preserving feasibility of solutions, methods that distinguish between fea-
sible and infeasible solutions, cf. References 16 and 17). However, the simple strategy described
previously for equality and inequality constraints will be shown to be quite effective for the prob-
lem considered in this paper.
11
ASCENDING TRAJECTORIES
The ascending trajectories are determined by employing canonical units: the distance unit
(DU) is the Earth radius, whereas the time unit (TU) is such that
3 2
1 DU TU
E
= . Thus,
1 DU 6378.165 km = and 1 TU 806.8 sec = .
With regard to the last stage trajectory, the swarming optimizer is employed with the follow-
ing settings: 50 N = (number of particles) and 500
IT
N = (number of iterations). The optimal
values of the unknown parameters are sought in the following ranges: ( )
0
1 1 1, 2,3
k
k = ,
0 f , and 0.01 TU 0.2 TU
f
t . It is worth noticing that the constraint reduction allows
arbitrarily defining the search space for the initial values of the Lagrange multipliers. This means
that they can be sought in the interval
0
1 1
k
by the PSO algorithm, and only a posteriori
their correct values (fulfilling also the transversality condition (32)) can be recovered.
Three test cases have been considered:
Case 1: 280 km and 5.2 deg
Case 2: 280 km and 45 deg
Case 3: 280 km and 90 deg
d d
d d
d d
h i
h i
h i
= =
= =
= =
The main results (azimuth at release
L
, flight path angle at the second stage separation
( )
2
t , orbit semi-major axis
f
a , eccentricity
f
e , inclination
f
i , coast duration
CO
t , and final
mass at injection
f
m ) are reported in the following. Figures 1, 3, and 5 portray some state com-
ponents (radius, velocity and flight path angle) and the ground tracks, whereas Figures 2, 4, and 6
illustrate the corresponding thrust pointing angle time histories for each of the three subrockets.
( )
2
7
Case 1: 0.0 deg 20.0 deg 175.2 sec
280.004 km 7.260 10 5.2 deg 140.4 kg
L CO
f E f f f
t t
a R e i m
= = =
= + = = =
(38)
( )
2
7
Case 2: 40.0 deg 20.5 deg 171.3 sec
280.002 km 4.377 10 45.7 deg 133.7 kg
L CO
f E f f f
t t
a R e i m
= = =
= + = = =
(39)
( )
2
7
Case 3: 4.0 deg 21.0 deg 158.2 sec
279.994 km 4.403 10 87.7 deg 120.6 kg
L CO
f E f f f
t t
a R e i m
= = =
= + = = =
(40)
From inspecting the results summarized in Eqs. (38)-(40) it is apparent that the final conditions at
injection are fulfilled in a satisfactory way. Moreover, the final mass decreases as the orbit incli-
nation increases. This is a predictable result and is related to the launch site, which is located in
the proximity of the Earth equator. This circumstance implies that as the operational orbit inclina-
tion increases, an increasing amount of fuel is employed to correct the initial inertial velocity,
which has a nonnegligible component directed toward East.
12
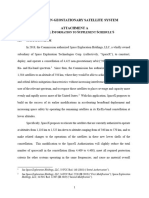
Figure 1. Case 1: altitude, inertial velocity and flight path angle, ground track
Figure 2. Case 1: control for the first two stages (a) and for the last stage (b)
13
Figure 3. Case 2: altitude, inertial velocity and flight path angle, ground track
Figure 4. Case 2: control for the first two stages (a) and for the last stage (b)
14
Figure 5. Case 3: altitude, inertial velocity and flight path angle, ground track
Figure 6. Case 3: control for the first two stages (a) and for the last stage (b)
15
CONCLUSION
The generation of an optimal trajectory for multistage launch vehicles is a challenging prob-
lem, treated with different approaches in the past. This work proposes and successfully applies a
simple technique for generating near optimal three-dimensional ascending trajectories for multi-
stage rockets, for the purpose of performance evaluation. Only existing routines and a simple im-
plementation of swarming algorithm are employed, in conjunction with the analytical necessary
conditions for optimality, applied to the upper stage trajectory. A particular configuration of the
launch vehicle is assumed, taking into account realistic propulsive, structural, and aerodynamic
data.
This study proves how the desired orbit right ascension of the ascending node and inclination
can be obtained by properly selecting the launch time and the azimuth angle at release, respec-
tively. The remaining orbit elements of the operational orbit are attained by choosing a suitable
control law for the thrust direction time history, and by selecting the optimal coast duration at the
second stage separation.
The solution found in this work appears suitable also for being employed as a guess for more
refined optimization algorithms.
APPENDIX 1. REFERENCE FRAMES
The rocket motion is conveniently described in rotating, i.e. non-inertial, reference frames.
The Earth-centered Earth-fixed (ECEF) reference frame represents a reference system that is rig-
idly attached to the Earth. Under the assumption that the planet rotates with the constant angular
rate
E
this circumstance implies that also the reference frame rotates with angular rate
E
with
respect to an inertial Earth-centered (ECEI) reference frame, denoted with ( )
1 2 3
, , c c c . The origin
of both the inertial and the rotating coordinate system is the center of the planet, O;
1
c is the ver-
nal axis. The unit vector
3
c k is aligned with the planet axis of rotation and is positive north-
ward, and therefore
( )
E E
k represents the (vector) rotation rate of the ECEF-frame with
respect to the ECEI-frame. The unit vector intersects the Greenwich meridian at all times. The
ECEF-frame is associated with
( )
, , j k , which form a right-handed, time-dependent sequence of
unit vectors. As the reference Greenwich meridian rotates with rotation rate
E
, its angular posi-
tion (with respect to the ECEI-frame) is identified by its absolute longitude (usually termed
Greenwich sidereal time) ( ) ( ) ( )
g g E
t t t t = + , where t denotes a generic time instant.
The position vector of the orbiting spacecraft in the ECEF-frame is denoted with r, whereas
the subscript I corresponds to a quantity in the ECEI-frame. As the ECEF-frame and the ECEI-
frame have a common origin, it is evident that
I
r r . In contrast, the inertial velocity
I
v is re-
lated to the (relative) velocity v through the following expression:
I E
= + v v r (41)
This means that, unlike the position vector, the velocity vector in rotating coordinates, v , does
not coincide with the inertial velocity vector,
I
v .
An additional useful reference frame is represented by the right-handed Cartesian coordinate
system
( )
, , r E N , where r is the unit vector aligned with r,
E is directed along the local East
16
direction, and
N is aligned with the local North direction. It is straightforward to obtain
( )
, , r E N from
( )
, , j k through two elementary rotations: the first (counterclockwise by the geo-
graphical longitude angle ) about axis 3, the second (clockwise by the latitude angle ) about
axis 2.
A third useful rotating frame is
( )
r, ,h , where
is aligned with the projection of the velocity
v onto the horizontal plane
( )
E, N . This frame is obtained from
( )
, , r E N through a counter-
clockwise rotation about axis 1 by the heading angle (cf. Fig. 7). As a result,
( )
r, ,h can be
written as a function of
( )
, , j k :
T T
A
r h j k
( (
=
R , where
cos cos cos sin sin
sin sin cos cos sin sin sin sin cos cos sin cos
cos sin cos sin sin cos sin sin sin cos cos cos
A
(
(
=
(
( +
R
(42)
Finally, the reference frame
( )
n,v,h (with v aligned with v) is obtained from
( )
r, ,h through
a clockwise rotation about axis 3 by the flight path angle (Fig. 7). From inspecting Fig. 7 it is
apparent that
[ ]
sin cos cos cos sin
T
v r E N
(
=
v (43)
The overall aerodynamic force A is conveniently written in the
( )
n,v,h -frame as the sum of two
terms, i.e. lift L and drag D:
Ln Dv = A (44)
Figure 7.
( )
r, E, N -frame,
( )
n,v,h -frame, and related angles
17
APPENDIX 2. STATE VARIABLES AND ORBITAL ELEMENTS
The derivation of the orbital elements ( ) , , , , , a e i f from the relative state variables
( ) , , , , , r v follows two steps:
(1) derivation of the inertial state variables ( ) , , , , ,
I I I I I I
r v from the relative state vari-
ables ( ) , , , , , r v
(2) derivation of the orbital elements ( ) , , , , , a e i f from the inertial state vari-
ables ( ) , , , , ,
I I I I I I
r v
With regard to step (1), the fact that
I
r r and the definition of the reference
( )
, , j k implies
that
I I g I
r r = = + =
(45)
The velocity vectors
I
v and v have the following expressions in the rotating frame
( )
, , r E N :
sin sin
cos cos and cos cos
cos sin cos sin
T T
I
I I I I
I I
r r
v E v E
N N
( (
( (
( (
( (
= =
( (
( (
( (
( (
v v
(46)
Due to Eq. (46) and to the fact that
cos
E E
r E = r , Eq. (41) yields three relations:
sin sin
I I
v v = (47)
cos cos cos cos cos
I I I E
v v r = + (48)
cos sin cos sin
I I I
v v = (49)
which lead to the following expressions of
I
,
I
v , and
I
as functions of , v , and :
( )
2
2
cos 2 cos cos cos
I E E
v v r v r = + + (50)
sin
arcsin
I
I
v
v
(
=
(
(51)
cos cos cos cos sin
cos and sin
cos cos
E
I I
I I I I
v r v
v v
+
= =
(52)
With regard to step (2), the in-plane orbital elements a, e, and f can be easily calculated from r,
I
, and
I
v . In fact, the conservation of energy yields a:
18
2
2
E
E I
r
a
rv
(53)
Then, the angular momentum magnitude equals cos
I I
rv and can also be written in terms of or-
bital elements as
( )
2
1
E
a e . Hence, the orbit eccentricity is given by
( )
2
cos
1
I I
E
rv
e
a
= (54)
The true anomaly f can be found by considering the polar equation of the ellipse,
( ) ( )
2 2
1 1
cos
1 cos
a e a e r
r f
e f re
= =
+
(55)
in conjunction with the radial component of velocity:
( )
( )
2
2
1
sin
sin sin sin
1
a e
v
e f v f
e a e
= =
(56)
The remaining orbital elements (i, , and ) can be obtained by considering the rotation matrix
that relates
( )
r, ,h to ( )
1 2 3
, , c c c , written in terms of the angles i, , and
( )
f + :
[ ]
1 2 3
T
T
B
r h c c c
(
=
R , where
18
:
cos cos sin cos sin cos sin sin cos cos sin sin
sin cos cos cos sin sin sin cos cos cos cos sin
sin sin sin cos cos
B
i i i
i i i
i i i
+ (
(
= +
(
(
R
(57)
( )
r, ,h and ( )
1 2 3
, , c c c are also related through a rotation matrix
A
R formally identical to
A
R
(cf. Eq. (42)), with
I
and
I
in place of and , respectively. The fact that
A B
R R leads to
the following relations:
( ) arccos cos cos
I
i = (58)
cos sin cos sin sin cos sin sin sin cos
sin cos
sin sin
I I I I I I I I
i i
+ +
= = (59)
sin cos sin
sin cos
sin sin
I
i i
= = (60)
and finally to obtaining f = . Due to Eqs. (14), (15), and (59) the proper choice of the re-
lease time allows setting
I
to the value that corresponds to the desired RAAN
d
.
19
REFERENCES
[1] A. Miele, "Multiple-Subarc Gradient-Restoration Algorithm, Part 1: Algorithm Structure." Journal of Optimiza-
tion Theory and Applications, Vol. 116, No. 1, pp. 1-17, 2003
[2] A. Miele, "Multiple-Subarc Gradient-Restoration Algorithm, Part 1: Application to a Multistage Launch Vehicle
Design." Journal of Optimization Theory and Applications, Vol. 116, No. 1, pp. 19-39, 2003
[3] K. R. Brown, E. F. Harrold, and G. W. Johnson, "Rapid Optimization of Multiple-Burn Rocket Flights." NASA
CR-1430, 1969
[4] C. R. Hargraves and S. W. Paris, "Direct Trajectory Optimization Using Nonlinear Programming and Colloca-
tion." Journal of Guidance, Control and Dynamics, Vol. 10, No. 4, pp. 338-342, 1987
[5] A. L. Herman and B. A. Conway, "Direct Optimization Using Collocation Based on High-Order Gauss-Lobatto
Quadrature Rules," Journal of Guidance, Control and Dynamics, Vol. 19, No. 3, pp. 592-599, 1996
[6] P. J. Enright and B. A. Conway, "Discrete Approximations to Optimal Trajectories Using Direct Transcription
and Nonlinear Programming," Journal of Guidance, Control and Dynamics, Vol. 15, No. 4, pp. 994-1002, 1992
[7] J. T. Betts, "Optimal Interplanetary Orbit Transfers by Direct Transcription," Journal of the Astronautical Sci-
ences, Vol. 42, No. 3, pp. 247-326, 1994
[8] H. Seywald, "Trajectory Optimization Based on Differential Inclusion," Journal of Guidance, Control and Dy-
namics, Vol. 17, No. 3, pp. 480-487, 1994
[9] V. Coverstone-Carroll and S. N. Williams, "Optimal Low Thrust Trajectories Using Differential Inclusion Con-
cepts," Journal of the Astronautical Sciences, Vol. 42, No. 4, pp. 379-393, 1994
[10] P. F. Gath and A. J. Calise, "Optimization of Launch Vehicle Ascent Trajectories with Path Constraints and Coast
Arcs." Journal of Guidance, Control and Dynamics, Vol. 24, No. 2, pp. 296-304, 2001
[11] P. Lu and B. Pan, "Trajectory optimization and guidance for an advanced launch system." 30
th
Aerospace Sci-
ences Meeting and Exhibit, Reno, NV, 1992; paper AIAA 1992-732
[12] M. Sirinian, "La Traiettoria di lancio del San Marco II." Atti del Centro Ricerche Aerospaziali, Universit di
Roma, Scuola di Ingegneria Aerospaziale, 1967
[13] A. E. Bryson and Y. C. Ho, Applied Optimal Control, Hemisphere, New York, NY, 1975, pp. 71-89
[14] D. Hull, Optimal Control Theory for Applications, Springer, New York, NY, 2003, pp. 247-257
[15] M. Pontani and B. A. Conway, "Particle Swarm Optimization Applied to Space Trajectories." Journal of Guid-
ance, Control, and Dynamics, Vol. 33, No. 5, 2010, pp. 1429-1441
[16] X. Hu, Y. Shi, and R. Eberhart, "Recent Advances in Particle Swarm." Proceedings of the IEEE Congress on
Evolutionary Computation (CEC 2004), Portland, OR, 2004, pp. 90-97
[17] Z. Michalewicz and M. Schoenauer, "Evolutionary Algorithms for Constrained Parameter Optimization Prob-
lems." Evolutionary Computation, Vol. 4, No. 1, 1996, pp. 1-32
[18] J. E. Prussing and B. A. Conway, Orbital Mechanics, Oxford University Press, New York, NY, 1993, pp. 46-54
You might also like
- Launch Site Impact on Rocket Design CostsNo ratings yetLaunch Site Impact on Rocket Design Costs5 pages
- Staging Optimization of Satellite Launch Vehicles With ASTOSNo ratings yetStaging Optimization of Satellite Launch Vehicles With ASTOS20 pages
- Rocket Staging Analysis and CalculationsNo ratings yetRocket Staging Analysis and Calculations7 pages
- Rocket Equation and Multi-Stage MechanicsNo ratings yetRocket Equation and Multi-Stage Mechanics21 pages
- Bryson and Ross Optimum Rocket Trajectories With Aerodynamic DragNo ratings yetBryson and Ross Optimum Rocket Trajectories With Aerodynamic Drag5 pages
- Multistage Vehicle Optimization TechniquesNo ratings yetMultistage Vehicle Optimization Techniques8 pages
- Rocket Design and Trajectory OptimizationNo ratings yetRocket Design and Trajectory Optimization118 pages
- Staging and Ascent Trajectory: CVA 2011summer School100% (1)Staging and Ascent Trajectory: CVA 2011summer School32 pages
- Preliminary Design and Flight Simulation of A Sustainable and Partially Recoverable TSTO For LEO PayloadNo ratings yetPreliminary Design and Flight Simulation of A Sustainable and Partially Recoverable TSTO For LEO Payload34 pages
- Launch Vehicle Capability Analysis FrameworkNo ratings yetLaunch Vehicle Capability Analysis Framework17 pages
- Rocket Propulsion Fundamentals ExplainedNo ratings yetRocket Propulsion Fundamentals Explained15 pages
- Low-Thrust Trajectory Optimization TechniquesNo ratings yetLow-Thrust Trajectory Optimization Techniques185 pages
- Rocket Propulsion Fundamentals and TechniquesNo ratings yetRocket Propulsion Fundamentals and Techniques22 pages
- Optimal Mars Trajectories with Hybrid PropulsionNo ratings yetOptimal Mars Trajectories with Hybrid Propulsion13 pages
- Staging and Control of Rockets and Missiles - PritamashutoshNo ratings yetStaging and Control of Rockets and Missiles - Pritamashutosh9 pages
- Two-Stage Launch Vehicle Trajectory StudyNo ratings yetTwo-Stage Launch Vehicle Trajectory Study8 pages
- A Survey On Low Thrust Trajectory OptimiNo ratings yetA Survey On Low Thrust Trajectory Optimi39 pages
- A New Guidance Law For A Tactical Surface-To-Surface MissileNo ratings yetA New Guidance Law For A Tactical Surface-To-Surface Missile24 pages
- Attitude Guidance: Reducing The Cost of Rotating From A' To B'No ratings yetAttitude Guidance: Reducing The Cost of Rotating From A' To B'18 pages
- Space Flight Dynamics 1st Edition Craig A. KlueverNo ratings yetSpace Flight Dynamics 1st Edition Craig A. Kluever370 pages
- Additive Manufacturing in Space PropulsionNo ratings yetAdditive Manufacturing in Space Propulsion15 pages
- Walter Hohmann'S Roads in Space: William I. MclaughlinNo ratings yetWalter Hohmann'S Roads in Space: William I. Mclaughlin14 pages
- Garrison - 1997 - Systems Engineering Trades For The Iridium Constellation PDFNo ratings yetGarrison - 1997 - Systems Engineering Trades For The Iridium Constellation PDF6 pages
- A Discrete Design Method of Repeat Ground Track Orbit For Earth Observation SatellitesNo ratings yetA Discrete Design Method of Repeat Ground Track Orbit For Earth Observation Satellites8 pages
- Orbital Mechanics Reference Sheets Equations and Algorithms 1689515592100% (1)Orbital Mechanics Reference Sheets Equations and Algorithms 16895155922 pages
- The Earth Is Flat Be Afraid B - Casper Stith 107-159No ratings yetThe Earth Is Flat Be Afraid B - Casper Stith 107-15953 pages
- Halo Orbit Stationkeeping in Jupiter-EuropaNo ratings yetHalo Orbit Stationkeeping in Jupiter-Europa22 pages
- Satellite Orbits: Uncertainty & ControlNo ratings yetSatellite Orbits: Uncertainty & Control204 pages
- Interstellar: Physics and Gravity ExplainedNo ratings yetInterstellar: Physics and Gravity Explained4 pages
- Orbital Mechanics John E Prussing 41R4HD3q5zL0% (1)Orbital Mechanics John E Prussing 41R4HD3q5zL3 pages
- Space Policy-Theoretical Space Wargame Software-Unclassified100% (1)Space Policy-Theoretical Space Wargame Software-Unclassified211 pages
- 1 Trường Thpt Chuyên Bảo Lộc - Tp. Bảo LộcNo ratings yet1 Trường Thpt Chuyên Bảo Lộc - Tp. Bảo Lộc17 pages