0% found this document useful (0 votes)
5 views3 pagesShorer's Deflection Equation
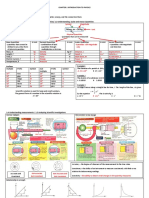
Shorer's deflection equation is used in beam theory to analyze the dynamic response of beams and plates under external forces. The derivation involves force and moment equilibrium, leading to a differential equation that accounts for bending, shear forces, damping, and external loads. The equation can be applied to dynamic systems, relating mass, damping, stiffness, and external forcing in a similar manner as in the beam analysis.
Uploaded by
John Paul Gayathi Construction LLCCopyright
© © All Rights Reserved
We take content rights seriously. If you suspect this is your content, claim it here.
Available Formats
Download as DOCX, PDF, TXT or read online on Scribd
0% found this document useful (0 votes)
5 views3 pagesShorer's Deflection Equation
Shorer's deflection equation is used in beam theory to analyze the dynamic response of beams and plates under external forces. The derivation involves force and moment equilibrium, leading to a differential equation that accounts for bending, shear forces, damping, and external loads. The equation can be applied to dynamic systems, relating mass, damping, stiffness, and external forcing in a similar manner as in the beam analysis.
Uploaded by
John Paul Gayathi Construction LLCCopyright
© © All Rights Reserved
We take content rights seriously. If you suspect this is your content, claim it here.
Available Formats
Download as DOCX, PDF, TXT or read online on Scribd
/ 3