You might also like
- Glowinski, D., Dael, N., Camurri, A., Volpe, G., Mortillaro, M., & Scherer, K. R. (2011). Towards a minimal representation of affective gestures. IEEE Transactions on Affective Computing, 2(2), 106–118..pdfDocument8 pagesGlowinski, D., Dael, N., Camurri, A., Volpe, G., Mortillaro, M., & Scherer, K. R. (2011). Towards a minimal representation of affective gestures. IEEE Transactions on Affective Computing, 2(2), 106–118..pdfMaria MiñoNo ratings yet
- FaceDocument11 pagesFaceMarriam AkhtarNo ratings yet
- On Posture As A Modality For Expressing and Recognizing EmotionsDocument8 pagesOn Posture As A Modality For Expressing and Recognizing EmotionsAndra BaddNo ratings yet
- Acii 185Document8 pagesAcii 185BelosnezhkaNo ratings yet
- Reflex Movements for Virtual HumansDocument10 pagesReflex Movements for Virtual HumansVignesh RajaNo ratings yet
- Body Movements For Affective ExpressionDocument19 pagesBody Movements For Affective ExpressionSinan SonluNo ratings yet
- IJETR032336Document5 pagesIJETR032336erpublicationNo ratings yet
- Recognizing Emotions From Videos by Studying Facial Expressions, Body Postures and Hand GesturesDocument4 pagesRecognizing Emotions From Videos by Studying Facial Expressions, Body Postures and Hand GesturesFelice ChewNo ratings yet
- Delsarte CameraReadyDocument14 pagesDelsarte CameraReadydaveNo ratings yet
- Planificacion e Imitacion de Movimientos CorporalesDocument19 pagesPlanificacion e Imitacion de Movimientos CorporalesJc BTorresNo ratings yet
- Neural Mechanisms SubservingDocument7 pagesNeural Mechanisms SubservingRandy HoweNo ratings yet
- Dance Accion and Social Cognition Brain and CognitionDocument6 pagesDance Accion and Social Cognition Brain and CognitionrorozainosNo ratings yet
- An Exploration of The Perception of Dance and Its Relation To Biomechanical MotionDocument10 pagesAn Exploration of The Perception of Dance and Its Relation To Biomechanical MotionMaria Elizabeth Acosta BarahonaNo ratings yet
- Body Motion and Emotions DMPDocument6 pagesBody Motion and Emotions DMPAnonymous wTvi61tjANo ratings yet
- NeuroaestheticsDocument6 pagesNeuroaestheticsIvereck IvereckNo ratings yet
- Emotion Classification in Arousal Valence Model Using MAHNOB-HCI DatabaseDocument6 pagesEmotion Classification in Arousal Valence Model Using MAHNOB-HCI DatabaseParantapDansanaNo ratings yet
- Recognizing and Regulating Emotions Through Body PostureDocument7 pagesRecognizing and Regulating Emotions Through Body PostureAlexOO7No ratings yet
- NotesDocument14 pagesNotesjohn awaNo ratings yet
- Analysis of Emotions From Body Postures Based On Digital ImagingDocument6 pagesAnalysis of Emotions From Body Postures Based On Digital ImagingPhùng Ngọc TânNo ratings yet
- The Human Equation: The Constant in Human Development and Culture from Pre-Literacy to Post-Literacy -- Book 1, The Human Equation ToolkitFrom EverandThe Human Equation: The Constant in Human Development and Culture from Pre-Literacy to Post-Literacy -- Book 1, The Human Equation ToolkitRating: 5 out of 5 stars5/5 (1)
- Designing Unstable Landscapes Improvisational Dance Within Cognitive Systems by Marlon Barrios SolanoDocument12 pagesDesigning Unstable Landscapes Improvisational Dance Within Cognitive Systems by Marlon Barrios SolanoMarlon Barrios SolanoNo ratings yet
- ACII HandbookDocument21 pagesACII HandbookJimmygadu007No ratings yet
- The Role of Attention Perception and Mem PDFDocument13 pagesThe Role of Attention Perception and Mem PDFMarian ChiraziNo ratings yet
- Embodiment For BehaviorDocument28 pagesEmbodiment For BehaviorSuzana LuchesiNo ratings yet
- Combining Facial and Postural ExpressionDocument14 pagesCombining Facial and Postural ExpressionSterling PliskinNo ratings yet
- Koch 2011 BodyRhythmsDocument18 pagesKoch 2011 BodyRhythmsLuminita HutanuNo ratings yet
- Going Viral Thesis FinalDocument74 pagesGoing Viral Thesis FinalNathan AndaryNo ratings yet
- A Set of Full Body Movement Features For Emotion Recognition To Help Children Affected by Autism Spectrum ConditionDocument7 pagesA Set of Full Body Movement Features For Emotion Recognition To Help Children Affected by Autism Spectrum Conditionnabeel hasanNo ratings yet
- EmotionSense Emotion Recognition Based onDocument10 pagesEmotionSense Emotion Recognition Based ongabrielaNo ratings yet
- Ballistic Hand Movements: Abstract. Common Movements Like Reaching, Striking, Etc. Observed DuringDocument12 pagesBallistic Hand Movements: Abstract. Common Movements Like Reaching, Striking, Etc. Observed DuringpsundarusNo ratings yet
- ButohDocument10 pagesButohShilpa AlaghNo ratings yet
- Beffara 2012Document4 pagesBeffara 2012April ShedyakNo ratings yet
- Automatic ECG-Based Emotion Recognition in Music ListeningDocument16 pagesAutomatic ECG-Based Emotion Recognition in Music ListeningmuraliNo ratings yet
- 3D Skeleton-Based Human Action Classification: A SurveyDocument18 pages3D Skeleton-Based Human Action Classification: A Surveyhvnth_88No ratings yet
- Emotion Recognition Through Multiple Modalities: Face, Body Gesture, SpeechDocument13 pagesEmotion Recognition Through Multiple Modalities: Face, Body Gesture, SpeechAndra BaddNo ratings yet
- Nonlinear dynamics of the brain: emotion and cognitionDocument17 pagesNonlinear dynamics of the brain: emotion and cognitionbrinkman94No ratings yet
- A Motion Capture Library For The Study of Identity, Gender, and Emotion Perception From Biological MotionDocument8 pagesA Motion Capture Library For The Study of Identity, Gender, and Emotion Perception From Biological MotionStanko.Stuhec8307No ratings yet
- Perception of MotionDocument32 pagesPerception of MotionJoão Dos Santos MartinsNo ratings yet
- Tracking The Origin of Signs in Mathematical Activity: A Material Phenomenological ApproachDocument35 pagesTracking The Origin of Signs in Mathematical Activity: A Material Phenomenological ApproachWolff-Michael RothNo ratings yet
- Experiência Extra CorporalDocument10 pagesExperiência Extra CorporalINFO100% (2)
- TR 2009 02Document8 pagesTR 2009 02RichieDaisyNo ratings yet
- EmotionsDocument14 pagesEmotionsz mousaviNo ratings yet
- Binding Action and Emotion in Social UnderstandingDocument9 pagesBinding Action and Emotion in Social UnderstandingJoaquin OlivaresNo ratings yet
- Berson2016 Chapter CartographiesOfRestTheSpectralDocument8 pagesBerson2016 Chapter CartographiesOfRestTheSpectralNAILA ZAQIYANo ratings yet
- Aesthetic Preferences For Prototypical Movements in Human ActionsDocument13 pagesAesthetic Preferences For Prototypical Movements in Human ActionsAndrésNo ratings yet
- The Use of Semantic Human Description As A Soft Biometric: Sina Samangooei Baofeng Guo Mark S. NixonDocument7 pagesThe Use of Semantic Human Description As A Soft Biometric: Sina Samangooei Baofeng Guo Mark S. NixonmalekinezhadNo ratings yet
- Body Segment Parameters - Drillis Contini BluesteinDocument23 pagesBody Segment Parameters - Drillis Contini BluesteinJavier VillavicencioNo ratings yet
- From The Lab To The Real World Affect Recognition Using Multiple Cues and ModalitiesDocument37 pagesFrom The Lab To The Real World Affect Recognition Using Multiple Cues and Modalitiessherif.m.osamaNo ratings yet
- tmp5D49 TMPDocument8 pagestmp5D49 TMPFrontiersNo ratings yet
- Entrevista Hubert GodardDocument8 pagesEntrevista Hubert GodardKk42bNo ratings yet
- RoboticsDocument23 pagesRoboticschotumotu131111No ratings yet
- Visual Perception of Human MovementDocument14 pagesVisual Perception of Human MovementClau OrellanoNo ratings yet
- Vol9 Art4 Gomes-Cochet-Guyon DanceDocument23 pagesVol9 Art4 Gomes-Cochet-Guyon DanceNorma GomesNo ratings yet
- Recognise People by The Way They Walk.Document7 pagesRecognise People by The Way They Walk.Béllà NoussaNo ratings yet
- Gale Researcher Guide for: Experimental and Behavioral PsychologyFrom EverandGale Researcher Guide for: Experimental and Behavioral PsychologyNo ratings yet
- Claudio Garuti, Isabel Spencer: Keywords: ANP, Fractals, System Representation, Parallelisms, HistoryDocument10 pagesClaudio Garuti, Isabel Spencer: Keywords: ANP, Fractals, System Representation, Parallelisms, HistoryjegosssNo ratings yet
- Pollick2002 PDFDocument11 pagesPollick2002 PDFedvinas6valikonisNo ratings yet
- Geometric Translations of The Body in MotionDocument8 pagesGeometric Translations of The Body in Motionarch.samermabroukNo ratings yet
- Department of Exercise and Sport Science Manchester Metropolitan University, UKDocument24 pagesDepartment of Exercise and Sport Science Manchester Metropolitan University, UKChristopher ChanNo ratings yet
- Zaini 2012 BehavResMethDocument16 pagesZaini 2012 BehavResMethE PNo ratings yet
- Cla IdmaDocument160 pagesCla Idmacurotto1953No ratings yet
- TM T70 BrochureDocument2 pagesTM T70 BrochureNikhil GuptaNo ratings yet
- Psych 1xx3 Quiz AnswersDocument55 pagesPsych 1xx3 Quiz Answerscutinhawayne100% (4)
- Classification of AnimalsDocument6 pagesClassification of Animalsapi-282695651No ratings yet
- Greek Myth WebquestDocument9 pagesGreek Myth Webquesthollyhock27No ratings yet
- 2008-14-03Document6 pages2008-14-03RAMON CALDERONNo ratings yet
- Nigeria Emergency Plan NemanigeriaDocument47 pagesNigeria Emergency Plan NemanigeriaJasmine Daisy100% (1)
- Atlas Ci30002Tier-PropanDocument3 pagesAtlas Ci30002Tier-PropanMarkus JeremiaNo ratings yet
- Search Engine Marketing Course Material 2t4d9Document165 pagesSearch Engine Marketing Course Material 2t4d9Yoga Guru100% (2)
- All Creatures Great and SmallDocument4 pagesAll Creatures Great and SmallsaanviranjanNo ratings yet
- X-Ray Generator Communication User's Manual - V1.80 L-IE-4211Document66 pagesX-Ray Generator Communication User's Manual - V1.80 L-IE-4211Marcos Peñaranda TintayaNo ratings yet
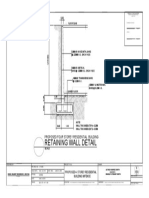
- Retaining Wall DetailsDocument1 pageRetaining Wall DetailsWilbert ReuyanNo ratings yet
- Desk PiDocument21 pagesDesk PiThan LwinNo ratings yet
- FSRE SS AppendixGlossariesDocument27 pagesFSRE SS AppendixGlossariessachinchem020No ratings yet
- Finding The Answers To The Research Questions (Qualitative) : Quarter 4 - Module 5Document39 pagesFinding The Answers To The Research Questions (Qualitative) : Quarter 4 - Module 5Jernel Raymundo80% (5)
- Spare Parts List: WarningDocument5 pagesSpare Parts List: WarningÃbdøū Èqúípmeńť MédîcàlNo ratings yet
- Orion C.M. HVAC Case Study-07.25.23Document25 pagesOrion C.M. HVAC Case Study-07.25.23ledmabaya23No ratings yet
- SocorexDocument6 pagesSocorexTedosNo ratings yet
- Tax1 Course Syllabus BreakdownDocument15 pagesTax1 Course Syllabus BreakdownnayhrbNo ratings yet
- Measurement of Mass and Weight by NPLDocument34 pagesMeasurement of Mass and Weight by NPLN.PalaniappanNo ratings yet
- MNCs-consider-career-development-policyDocument2 pagesMNCs-consider-career-development-policySubhro MukherjeeNo ratings yet
- 21st Century Literary GenresDocument2 pages21st Century Literary GenresGO2. Aldovino Princess G.No ratings yet
- LTG 04 DD Unit 4 WorksheetsDocument2 pagesLTG 04 DD Unit 4 WorksheetsNguyễn Kim Ngọc Lớp 4DNo ratings yet
- Aka GMP Audit FormDocument8 pagesAka GMP Audit FormAlpian BosixNo ratings yet
- A New Aftercooler Is Used On Certain C9 Marine Engines (1063)Document3 pagesA New Aftercooler Is Used On Certain C9 Marine Engines (1063)TASHKEELNo ratings yet
- Curriculam VitaeDocument3 pagesCurriculam Vitaeharsha ShendeNo ratings yet
- LINDA ALOYSIUS Unit 6 Seminar Information 2015-16 - Seminar 4 Readings PDFDocument2 pagesLINDA ALOYSIUS Unit 6 Seminar Information 2015-16 - Seminar 4 Readings PDFBence MagyarlakiNo ratings yet
- Why it's important to guard your free timeDocument2 pagesWhy it's important to guard your free timeLaura Camila Garzón Cantor100% (1)
- Public OpinionDocument7 pagesPublic OpinionSona Grewal100% (1)
- The Completely Randomized Design (CRD)Document16 pagesThe Completely Randomized Design (CRD)Rahul TripathiNo ratings yet