You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Training Course Pipeliq Library: Raúl Avezuela RodríguezDocument41 pagesTraining Course Pipeliq Library: Raúl Avezuela RodríguezrentboyrodriguezNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Training Course Pipeliq Library: Raúl Avezuela RodríguezDocument41 pagesTraining Course Pipeliq Library: Raúl Avezuela RodríguezrentboyrodriguezNo ratings yet
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- EcosimPro 4 6 Installation and Getting StartedDocument64 pagesEcosimPro 4 6 Installation and Getting StartedrentboyrodriguezNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Case Study #1:: Ethylene Refrigeration and Compression in An Olefin PlantDocument33 pagesCase Study #1:: Ethylene Refrigeration and Compression in An Olefin PlantrentboyrodriguezNo ratings yet
- Mode Transition Analyses of The Attached Pressurized Module Cabin Air Loop With EcosimproDocument12 pagesMode Transition Analyses of The Attached Pressurized Module Cabin Air Loop With EcosimprorentboyrodriguezNo ratings yet
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Basic Fan Engineering NotesDocument5 pagesBasic Fan Engineering NotesrentboyrodriguezNo ratings yet
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Eco Sim Pro Life SupportDocument14 pagesEco Sim Pro Life SupportrentboyrodriguezNo ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- 0017Document8 pages0017rentboyrodriguezNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- Simulation ARESDocument28 pagesSimulation ARESrentboyrodriguezNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Design Considerations Orifice Plate 1590507843 PDFDocument5 pagesDesign Considerations Orifice Plate 1590507843 PDFmanansudiNo ratings yet
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Parker LPG HoseDocument8 pagesParker LPG HosewfjerrNo ratings yet
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- O Level Physics Pressure NotesDocument28 pagesO Level Physics Pressure NotesMarvel ComicsNo ratings yet
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Design of TurbinesDocument47 pagesDesign of Turbinesnickdash09No ratings yet
- Hydraulic Fluids For Parker Axial Piston Pumps Series PVDocument6 pagesHydraulic Fluids For Parker Axial Piston Pumps Series PVY.EbadiNo ratings yet
- FLOW MEASUREMENT FUNDAMENTALSDocument38 pagesFLOW MEASUREMENT FUNDAMENTALSm.shehreyar.khan100% (1)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- Media Stress Intensity Analysis For Vert PDFDocument10 pagesMedia Stress Intensity Analysis For Vert PDFIgnacio León IbarraNo ratings yet
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Paes 126Document13 pagesPaes 126shuvatheduva123123123No ratings yet
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Astronomy - Galaxies and The Expanding UniverseDocument226 pagesAstronomy - Galaxies and The Expanding UniverseDigiSvcNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Practice FinalDocument4 pagesPractice FinalChennaiSuperkingsNo ratings yet
- Einsteins RefrigeratorDocument2 pagesEinsteins RefrigeratorHua Hidari YangNo ratings yet
- Production LoggingDocument209 pagesProduction Logginggonzalito777100% (1)
- Static&Dynamic LossDocument4 pagesStatic&Dynamic LossrazahNo ratings yet
- PSV Calculation SampleDocument2 pagesPSV Calculation SampleNaveen RaoNo ratings yet
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Measuring Vacuum PressureDocument4 pagesMeasuring Vacuum PressureTabyy RoxxNo ratings yet
- API 510 AnsDocument8 pagesAPI 510 AnsShyam SinghNo ratings yet
- FM 7-44 Revised May 2000 Spacing of Facilities in Outdoor Chemical PlantsDocument7 pagesFM 7-44 Revised May 2000 Spacing of Facilities in Outdoor Chemical PlantsNoah RyderNo ratings yet
- Katalog enDocument81 pagesKatalog enalgreatNo ratings yet
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
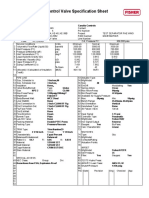
- Control Valve Specification Sheet - LCV 2inch 600# R 1Document1 pageControl Valve Specification Sheet - LCV 2inch 600# R 1FIRMANSYAHNo ratings yet
- Kick Tolerance PDFDocument6 pagesKick Tolerance PDFsaffarzadehNo ratings yet
- Handling Compressed Gas CylindersDocument103 pagesHandling Compressed Gas CylinderstorolsoNo ratings yet
- Chapter 2 (Water Pressure)Document12 pagesChapter 2 (Water Pressure)Ship Wonders100% (6)
- Piston Compressor New PDFDocument12 pagesPiston Compressor New PDFJunaid AhmedNo ratings yet
- Managed Pressure Drilling Techniques Explained in DetailDocument3 pagesManaged Pressure Drilling Techniques Explained in DetailAnonymous H9n5g3aaCENo ratings yet
- Tension-Weld® Strapping Tool: Downloaded From Manuals Search EngineDocument36 pagesTension-Weld® Strapping Tool: Downloaded From Manuals Search EnginePepeNo ratings yet
- Thermodynamic and transport properties of saturated steam and waterDocument26 pagesThermodynamic and transport properties of saturated steam and waterMuhammad Reza FahleviNo ratings yet
- Pressure and MomentsDocument48 pagesPressure and MomentsDessy Norma JuitaNo ratings yet
- FRLElementPressureRangeCombinationChartDocument6 pagesFRLElementPressureRangeCombinationChartDaryl Barrios LamedaNo ratings yet
- Conversion Unit, Units, Flow Rate, Pressure, Thermal, Energy, Calorie, Viscosity, Dynamic, British PDFDocument5 pagesConversion Unit, Units, Flow Rate, Pressure, Thermal, Energy, Calorie, Viscosity, Dynamic, British PDFljr21No ratings yet
- Check Valve AK Series Specifications and Flow Rate CharacteristicsDocument10 pagesCheck Valve AK Series Specifications and Flow Rate CharacteristicsFilozófus ÖnjelöltNo ratings yet
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)