You might also like
- The A Algorithm: Héctor Muñoz-AvilaDocument20 pagesThe A Algorithm: Héctor Muñoz-AvilaBinoy NambiarNo ratings yet
- A StarDocument20 pagesA StartoncuvasileNo ratings yet
- AstarDocument20 pagesAstarPetter PNo ratings yet
- AstarDocument20 pagesAstarPetter PNo ratings yet
- Lec5 6Document35 pagesLec5 6MazharulislamNo ratings yet
- Informed SearchDocument36 pagesInformed SearchDUDEKULA VIDYASAGARNo ratings yet
- Outline: Informed Search and Exploration For AgentsDocument7 pagesOutline: Informed Search and Exploration For AgentsEhsan GhasisinNo ratings yet
- Lecture 10 11Document38 pagesLecture 10 11ALi SaLman RahatNo ratings yet
- Ut - 1 - T - 4 A Star SearchDocument44 pagesUt - 1 - T - 4 A Star SearchDhivya Bharathi pNo ratings yet
- Informed Search AlgorithmsDocument39 pagesInformed Search AlgorithmsmmminishaNo ratings yet
- Lecture 08 Informed Search Strategies-IDocument45 pagesLecture 08 Informed Search Strategies-IHassan RazaNo ratings yet
- Informed Search AlgorithmsDocument39 pagesInformed Search Algorithmsviraj guptaNo ratings yet
- AI File - 5 PDFDocument46 pagesAI File - 5 PDFNahim's kitchenNo ratings yet
- L04 Search (MoreSearchStrategies)Document23 pagesL04 Search (MoreSearchStrategies)KofiNo ratings yet
- Search AlgorithmsDocument44 pagesSearch AlgorithmsHassan VilniusNo ratings yet
- A.I.: Informed Search Algorithms: Chapter III: Part DeuxDocument35 pagesA.I.: Informed Search Algorithms: Chapter III: Part DeuxAriel AsunsionNo ratings yet
- AI Unit-2Document75 pagesAI Unit-2Zaidali 050No ratings yet
- In From Ed SearchDocument24 pagesIn From Ed Searchapi-3854551No ratings yet
- Informed Search Algorithms: UNIT-2Document35 pagesInformed Search Algorithms: UNIT-2Tariq IqbalNo ratings yet
- Informed Search ProblemsDocument38 pagesInformed Search ProblemsTayyab NaveedNo ratings yet
- Informed Search Algorithms: Team Teaching AI (Created by Dewi Liliana) PTIIK 2012Document41 pagesInformed Search Algorithms: Team Teaching AI (Created by Dewi Liliana) PTIIK 2012Shatria KaniputraNo ratings yet
- Lecture-3.1 Heuristic SearchDocument131 pagesLecture-3.1 Heuristic SearchmusaNo ratings yet
- AI-03 Informed SearchDocument26 pagesAI-03 Informed SearchDebashish DekaNo ratings yet
- Optimal Searching: - AdvantagesDocument37 pagesOptimal Searching: - AdvantagesTamal Dey3335No ratings yet
- M04-Heuristics Informed SearchDocument41 pagesM04-Heuristics Informed SearchchakravarthyashokNo ratings yet
- AI Final PDFDocument9 pagesAI Final PDFJessi KrishnaNo ratings yet
- Lec 07Document37 pagesLec 07Sourabh ShahNo ratings yet
- Rec2 SolDocument6 pagesRec2 Solm22ai569No ratings yet
- Chapter 4Document75 pagesChapter 4Mohammad Omar FaruqNo ratings yet
- L8 HeuristicsDocument11 pagesL8 Heuristicsshini s gNo ratings yet
- SP14 CS188 Lecture 3 - Informed SearchDocument69 pagesSP14 CS188 Lecture 3 - Informed Searchimoptra143No ratings yet
- Informed Search (CMU)Document30 pagesInformed Search (CMU)WENXIN LIANGNo ratings yet
- Artificial Intelligence: Informed SearchDocument21 pagesArtificial Intelligence: Informed SearchDede Ari HidayatullohNo ratings yet
- Informed SearchDocument37 pagesInformed SearchtauraiNo ratings yet
- A General Introduction To Artificial IntelligenceDocument55 pagesA General Introduction To Artificial IntelligenceÁnh PhạmNo ratings yet
- Scsa1702 - Ai - Unit IiDocument42 pagesScsa1702 - Ai - Unit IiLolakapuri Ananth VardhanNo ratings yet
- 4 Best First Search A StarDocument24 pages4 Best First Search A Stardivyalakshmi81889897No ratings yet
- Heuristic-Search PDF PracticeDocument4 pagesHeuristic-Search PDF PracticePankaj ShuklaNo ratings yet
- Module 3Document26 pagesModule 3Yashwanth NNo ratings yet
- CPSC 352 - Artificial Intelligence Notes: A Algorithm Admissibility, Monotonicity, InformednessDocument4 pagesCPSC 352 - Artificial Intelligence Notes: A Algorithm Admissibility, Monotonicity, InformednessshuvasalvaNo ratings yet
- Informed Search and Exploration: Berlin ChenDocument77 pagesInformed Search and Exploration: Berlin Chenlogic_laoshirNo ratings yet
- Artificial Intelligence: Informed SearchDocument25 pagesArtificial Intelligence: Informed SearchPrasidha PrabhuNo ratings yet
- A Search Algorithm: Krishna Kumar (IT2018/122) Kishan Raj (IT2018/025) Aavriti Dutta (IT2018/101)Document14 pagesA Search Algorithm: Krishna Kumar (IT2018/122) Kishan Raj (IT2018/025) Aavriti Dutta (IT2018/101)Jessi KrishnaNo ratings yet
- Solving Problems by Searching Solving Problems by Searching: 14 Jan 2004 CS 3243 - Blind Search 1Document25 pagesSolving Problems by Searching Solving Problems by Searching: 14 Jan 2004 CS 3243 - Blind Search 1Gomathi ShanmugamNo ratings yet
- 03 InformedHeuristicSearchDocument80 pages03 InformedHeuristicSearchHaroonRashidNo ratings yet
- AI&ML Module 2Document114 pagesAI&ML Module 2Its MeNo ratings yet
- Artificial Intelligence: Informed Search and ExplorationDocument52 pagesArtificial Intelligence: Informed Search and ExplorationVarun YadavNo ratings yet
- Solving Problems by Searching: 14 Jan 2004 CS 3243 - Blind Search 1Document25 pagesSolving Problems by Searching: 14 Jan 2004 CS 3243 - Blind Search 1Gomathi ShanmugamNo ratings yet
- Heuristic Algorithm LectureDocument13 pagesHeuristic Algorithm LectureAwais AliNo ratings yet
- Set 3: Informed Heuristic Search: ICS 271 Fall 2014 Kalev KaskDocument78 pagesSet 3: Informed Heuristic Search: ICS 271 Fall 2014 Kalev KaskmadhavNo ratings yet
- Informed Search: CS 4804 Fall 2020Document27 pagesInformed Search: CS 4804 Fall 2020TryerNo ratings yet
- Informed Search NewDocument71 pagesInformed Search NewAshish_Chawla_518No ratings yet
- Heuristic SearchDocument46 pagesHeuristic SearchbangarrajuNo ratings yet
- Heuristic SearchDocument7 pagesHeuristic SearchKadali Lakshmi NirmalaNo ratings yet
- CSM6120 Introduction To Intelligent Systems: Informed SearchDocument58 pagesCSM6120 Introduction To Intelligent Systems: Informed SearchreemNo ratings yet
- Informed HeuristicSearchDocument39 pagesInformed HeuristicSearchRaghu SomuNo ratings yet
- PATH FINDING - Dijkstra's and A Algorithm'sDocument15 pagesPATH FINDING - Dijkstra's and A Algorithm'sMarisol Triple SNo ratings yet
- Heuristic Searching: A Search: Nazmul HasanDocument5 pagesHeuristic Searching: A Search: Nazmul HasanInternational Organization of Scientific Research (IOSR)No ratings yet
- Programme Name: BCS (HONS) Course Code: CSC 3200 Course Name: Artificial IntelligenceDocument4 pagesProgramme Name: BCS (HONS) Course Code: CSC 3200 Course Name: Artificial IntelligenceAnil khatriNo ratings yet
- Dynamic Programming Longest Common SubsequenceDocument3 pagesDynamic Programming Longest Common SubsequenceAnkitNo ratings yet
- LshortDocument171 pagesLshortCXBBANo ratings yet
- Lab Manual CS4500 Artificial Intelligence Lab Fall Session 2013, 1434 With Lab SessionDocument23 pagesLab Manual CS4500 Artificial Intelligence Lab Fall Session 2013, 1434 With Lab SessionAnkit100% (1)
- Lisp Tutorial: CS157 April 9, 2004Document27 pagesLisp Tutorial: CS157 April 9, 2004Nizam DeenNo ratings yet
- Lab Assignment of Computer Networks: Submitted By: Ankit Enroll: 167/11 Roll No.: 48 Branch: CSE Semester: 6Document7 pagesLab Assignment of Computer Networks: Submitted By: Ankit Enroll: 167/11 Roll No.: 48 Branch: CSE Semester: 6AnkitNo ratings yet
- VHDL Simulation Tutorials (INFN Torino Wiki)Document15 pagesVHDL Simulation Tutorials (INFN Torino Wiki)AnkitNo ratings yet
- JS1K Demo - The Making of - AckoDocument12 pagesJS1K Demo - The Making of - AckoAnkitNo ratings yet
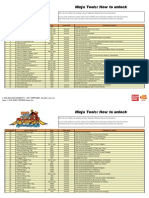
- Naruto Shippuden UNS Generations Ninja Tools UnlockDocument4 pagesNaruto Shippuden UNS Generations Ninja Tools UnlockAnkitNo ratings yet
- Control Systems TheoryDocument331 pagesControl Systems Theorycorsairsan100% (1)
- Naruto Shippuden UNS Generations Ninja Tools UnlockDocument4 pagesNaruto Shippuden UNS Generations Ninja Tools UnlockAnkitNo ratings yet
- Data Structures WikibooksDocument120 pagesData Structures WikibooksAnkitNo ratings yet
- 1 Hw6 SolutionsDocument8 pages1 Hw6 SolutionsdavejaiNo ratings yet
- Lecture 4b Urban Transportation Planning (Part 2) PDFDocument93 pagesLecture 4b Urban Transportation Planning (Part 2) PDFBhanuKhannaNo ratings yet
- R22-M.tech Curriculum and SyllabusDocument85 pagesR22-M.tech Curriculum and SyllabusVivekanandhan VijayanNo ratings yet
- Subtask2: A Maze Simulation: 1 Problem StatementDocument3 pagesSubtask2: A Maze Simulation: 1 Problem StatementAkash SuryawanshiNo ratings yet
- Ai Unit-1Document41 pagesAi Unit-1Sreeprada VNo ratings yet
- E. O. Frimpong Tee PDFDocument73 pagesE. O. Frimpong Tee PDFAna JanakievskaNo ratings yet
- Graphs: CS 302 - Data Structures Section 9.3Document78 pagesGraphs: CS 302 - Data Structures Section 9.3Jazib AlikhanNo ratings yet
- Design Analysis and Algorithms: (Unit I Question Bank)Document7 pagesDesign Analysis and Algorithms: (Unit I Question Bank)abcjohnNo ratings yet
- 5 GraphsDocument6 pages5 GraphsNguyen Tien Dat (K18 HL)No ratings yet
- Routing of Branched Water Distribution Networks Us PDFDocument6 pagesRouting of Branched Water Distribution Networks Us PDFAna JanakievskaNo ratings yet
- Link State RoutingDocument11 pagesLink State RoutingPav TechnicalsNo ratings yet
- Artificial IntelligenceDocument7 pagesArtificial IntelligenceManjil KarmacharyaNo ratings yet
- Problem Set 1Document13 pagesProblem Set 1redNo ratings yet
- Alg Part ADocument22 pagesAlg Part AHamid ArashNo ratings yet
- Rump Jalan TambangDocument9 pagesRump Jalan TambangAndre AlistinNo ratings yet
- MIT6 006F11 Quiz2 Sol PDFDocument15 pagesMIT6 006F11 Quiz2 Sol PDFAnjali GhoshNo ratings yet
- Programming Homework HelpDocument9 pagesProgramming Homework HelpProgramming Homework HelpNo ratings yet
- DAA Interview Questions and AnswersDocument9 pagesDAA Interview Questions and AnswersPranjal KumarNo ratings yet
- Solid Waste CollectionDocument70 pagesSolid Waste CollectionssasaduNo ratings yet
- Ai03 Classical Search Part1 Posthandouts PDFDocument63 pagesAi03 Classical Search Part1 Posthandouts PDFEnisa MEHMEDINo ratings yet
- Shortest-Route AlgorithmsDocument18 pagesShortest-Route Algorithmsأوكيتش شمشونNo ratings yet
- Art of Programming Contest Part13Document7 pagesArt of Programming Contest Part13karndeNo ratings yet
- Algorithms and Data Structures: Study Manual v2021.2Document8 pagesAlgorithms and Data Structures: Study Manual v2021.2Serkan SezinNo ratings yet
- STL2Document13 pagesSTL2Romee PanchalNo ratings yet
- 11199A048 - DAA Lab ExercisesDocument19 pages11199A048 - DAA Lab ExercisesAyapilla Sri hari PranavNo ratings yet
- Dijkstra Algorithm: Unit 03.03.02 CS 5220: Computer CommunicationsDocument12 pagesDijkstra Algorithm: Unit 03.03.02 CS 5220: Computer Communicationsarafath uzzamanNo ratings yet
- BSC C.S (H) 6th Semester SyllabusDocument6 pagesBSC C.S (H) 6th Semester Syllabusnyksolution rimitNo ratings yet
- Solving Problems by Searching: Chapter 3 - Unit 2Document70 pagesSolving Problems by Searching: Chapter 3 - Unit 28mk5n2q8ptNo ratings yet
- L01-02 - 8.11.2022 - Introduction To Algorithms and Roadmap of This CourseDocument48 pagesL01-02 - 8.11.2022 - Introduction To Algorithms and Roadmap of This CourseSamia RahmanNo ratings yet
- M.E. Cse.Document62 pagesM.E. Cse.janu130% (1)