You might also like
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5795)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Cat Flash File ReadxrefDocument179 pagesCat Flash File ReadxrefНиколай Белый89% (9)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- SLD Aux PDFDocument6 pagesSLD Aux PDFaviral mishraNo ratings yet
- 250 Service Manual PDFDocument47 pages250 Service Manual PDFSnejana Stoianov100% (2)
- Well Failure Model - Example: Mitigating Action Matrix - Key To Numbers Entered in Matrix AboveDocument20 pagesWell Failure Model - Example: Mitigating Action Matrix - Key To Numbers Entered in Matrix Aboveeng7mohamed7hashimNo ratings yet
- SSGCDocument20 pagesSSGCAdnan119No ratings yet
- CPCI Designing With Precast Concrete Structural Solutions PDFDocument44 pagesCPCI Designing With Precast Concrete Structural Solutions PDFMarie Fe Fortuno Bermido100% (1)
- Case Study Airbus Vs BoingDocument25 pagesCase Study Airbus Vs BoingRana ShahzaibNo ratings yet
- Norshore Drill Ship Presentation 1113Document34 pagesNorshore Drill Ship Presentation 1113Grand PappyNo ratings yet
- Fi̇z 137-CH 1-Measurement PDFDocument27 pagesFi̇z 137-CH 1-Measurement PDFkaskoskasNo ratings yet
- Manual 924HDocument811 pagesManual 924HJuliana Magalhães100% (1)
- C4 Tech Spec Issue 2Document5 pagesC4 Tech Spec Issue 2Дмитрий КалининNo ratings yet
- Lecture 5. Neutron LoggingDocument72 pagesLecture 5. Neutron LoggingDimash AbdrakhmanovNo ratings yet
- Simulation and Performance Analysis of Dielectric Modulated Dual Source Trench Gate TFET BiosensorDocument9 pagesSimulation and Performance Analysis of Dielectric Modulated Dual Source Trench Gate TFET BiosensoramitNo ratings yet
- Answer Key - CWT 1Document2 pagesAnswer Key - CWT 1Areeb AbbaxiNo ratings yet
- Thermoelectric Fan Powered by A CandleDocument4 pagesThermoelectric Fan Powered by A CandleMohd Farihan Bin JamaludinNo ratings yet
- Chemistry Practice QuestionsDocument12 pagesChemistry Practice QuestionsMfanafuthi0% (1)
- Management Analysis of MayfairDocument42 pagesManagement Analysis of MayfairIrfan KhalidNo ratings yet
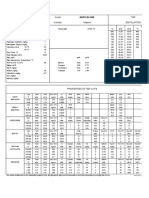
- Crude TBP Country Nigeria Distillation: Akpo BlendDocument2 pagesCrude TBP Country Nigeria Distillation: Akpo Blendeke23No ratings yet
- Assignment # 1 Principles of Steady-State Converter AnalysisDocument20 pagesAssignment # 1 Principles of Steady-State Converter AnalysisMandanas, John MaledrexNo ratings yet
- Operating Instructions: DishwasherDocument20 pagesOperating Instructions: DishwasherpetrushinNo ratings yet
- Wind Power DPR Consultancy Tender-APDCL-Last Date 05.09.23Document65 pagesWind Power DPR Consultancy Tender-APDCL-Last Date 05.09.23SRINIVASAN TNo ratings yet
- Chapter 1Document7 pagesChapter 1Ram Darcy PeñalosaNo ratings yet
- 2005 June Physics 2h PDFDocument24 pages2005 June Physics 2h PDFTatenda ChimwandaNo ratings yet
- HT Xlpe CableDocument21 pagesHT Xlpe CablePritam SinghNo ratings yet
- Green Building PBLDocument11 pagesGreen Building PBLsofea1121No ratings yet
- Carbon Adsorption VaporDocument12 pagesCarbon Adsorption VaporMehdi Hajd KacemNo ratings yet
- 900 Series Product Training ModuleDocument13 pages900 Series Product Training Modulemcr16986No ratings yet
- Energy, Work & Power QPDocument8 pagesEnergy, Work & Power QPSalman Farsi TaharatNo ratings yet
- Lugs and Ferrules Technical Information PDFDocument2 pagesLugs and Ferrules Technical Information PDFkwagga125No ratings yet
- Som Intelligent Densities Vertical CommunitiesDocument50 pagesSom Intelligent Densities Vertical CommunitiesRizwan Yousaf CheemaNo ratings yet