You might also like
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Next Generation Network: "Complementing The Internet For Converged Service"Document39 pagesNext Generation Network: "Complementing The Internet For Converged Service"Ali RazaNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- ASG-6-QSF-C02 Semester 3 TRG Programme - PG Courses - Summer Semester 2017 03 Jul - 01 Sep 2017 (EE), (ME) & (MTS) Day Venue Time Hours Instructor Code Course MethodsDocument1 pageASG-6-QSF-C02 Semester 3 TRG Programme - PG Courses - Summer Semester 2017 03 Jul - 01 Sep 2017 (EE), (ME) & (MTS) Day Venue Time Hours Instructor Code Course MethodsAli RazaNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Network Management and SNMPDocument27 pagesNetwork Management and SNMPAli RazaNo ratings yet
- Electronics and Semiconductors: Microelectronic Circuits, International Sixth EditionDocument31 pagesElectronics and Semiconductors: Microelectronic Circuits, International Sixth EditionAli RazaNo ratings yet
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- MPLS-TP: Yaakov (J) Stein September 2011Document61 pagesMPLS-TP: Yaakov (J) Stein September 2011Ali RazaNo ratings yet
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Signals and Amplifiers: Microelectronic Circuits, Sixth EditionDocument48 pagesSignals and Amplifiers: Microelectronic Circuits, Sixth EditionAli RazaNo ratings yet
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Matrices: CS485/685 Computer Vision Dr. George BebisDocument25 pagesMatrices: CS485/685 Computer Vision Dr. George BebisAli RazaNo ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
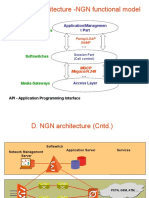
- D. NGN Architecture - NGN Functional Model: Application Servers Management ServersDocument29 pagesD. NGN Architecture - NGN Functional Model: Application Servers Management ServersAli RazaNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Economic Impact of Over-the-Top (OTT) ServicesDocument29 pagesEconomic Impact of Over-the-Top (OTT) ServicesAli RazaNo ratings yet
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- ATM IntroDocument27 pagesATM IntroAli RazaNo ratings yet
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- 14 Network ManagmentDocument21 pages14 Network ManagmentAli RazaNo ratings yet
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Abdellatif O. Abdellatif: Sudatel Telecom GroupDocument40 pagesAbdellatif O. Abdellatif: Sudatel Telecom GroupAli RazaNo ratings yet
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Isolated Diesel Grids - Renewable Integration: Marc Mueller-Stoffels, PHDDocument15 pagesIsolated Diesel Grids - Renewable Integration: Marc Mueller-Stoffels, PHDAli RazaNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- 06AP Physics C - KinematicsDocument17 pages06AP Physics C - KinematicsAli RazaNo ratings yet
- 2.3 Clipper and Clamper CircuitsDocument6 pages2.3 Clipper and Clamper CircuitsAli RazaNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Active Filter CircuitsDocument10 pagesActive Filter CircuitssightlesswarriorNo ratings yet
- SCS Alternative Inline Filter Elements Cross Reference NPDocument64 pagesSCS Alternative Inline Filter Elements Cross Reference NPthem100% (1)
- DSP 3rd ECE-II Sem MID2 BitsDocument4 pagesDSP 3rd ECE-II Sem MID2 Bitsnick furiasNo ratings yet
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- In Spatial Domain: %% %low Pass FilterDocument7 pagesIn Spatial Domain: %% %low Pass Filterripan030No ratings yet
- Iir 1Document55 pagesIir 1Joyita BiswasNo ratings yet
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
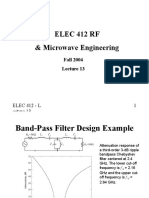
- E 412 F 04 Lec 13Document19 pagesE 412 F 04 Lec 13Vedran IbrahimovicNo ratings yet
- SX221129100 DocumentDocument3 pagesSX221129100 DocumentSara Castro LlontopNo ratings yet
- Filters in Radio FrequencyDocument29 pagesFilters in Radio Frequencyracman94No ratings yet
- Part Price ListDocument1 pagePart Price ListYusNo ratings yet
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Quotationto OrderDocument15 pagesQuotationto OrderJonathan KaleNo ratings yet
- Filter Picking ListDocument106 pagesFilter Picking Listanon_523777166No ratings yet
- Lista de FiltrosDocument155 pagesLista de FiltrosAhmad Bik ElhaysNo ratings yet
- Filters and Tuned Amplifiers: Passive LC Filters Inductorless Filters Active-RC Filters Switched CapacitorsDocument31 pagesFilters and Tuned Amplifiers: Passive LC Filters Inductorless Filters Active-RC Filters Switched Capacitorspardeep184No ratings yet
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- MCF Filters PDFDocument2 pagesMCF Filters PDFcgmannerheimNo ratings yet
- Scilab Manual For Digital Signal Processing by MR Vijay P Sompur Electronics Engineering Visvesvraya Technological UniversityDocument51 pagesScilab Manual For Digital Signal Processing by MR Vijay P Sompur Electronics Engineering Visvesvraya Technological Universitysuvarnalatha devarakonda100% (1)
- To Design and Implement An IIR Filter For Given SpecificationsDocument9 pagesTo Design and Implement An IIR Filter For Given Specifications4NM19EC157 SHARANYA R SHETTYNo ratings yet
- Finding The Maximum Magnitude Response (Gain) of Second-Order Filters Without CalculusDocument7 pagesFinding The Maximum Magnitude Response (Gain) of Second-Order Filters Without CalculusAhmed AbulilNo ratings yet
- Fir Filters ReportDocument8 pagesFir Filters ReportGaneshVenkatachalamNo ratings yet
- Elliptic High Pass FilterDocument59 pagesElliptic High Pass FilterAngela ReyesNo ratings yet
- Ex - 10 - Design of FIR FiltersDocument14 pagesEx - 10 - Design of FIR FiltersHrishikesh BhatNo ratings yet
- Creative Filter System CokinDocument1 pageCreative Filter System CokinFabio De Tomasi50% (2)
- Audio Equalizer in MatlabDocument44 pagesAudio Equalizer in MatlabAnkita Gupta100% (2)
- DSP - Unit II PDFDocument168 pagesDSP - Unit II PDFANo ratings yet
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Chebyshev Filters With NMath - CenterSpace BlogDocument7 pagesChebyshev Filters With NMath - CenterSpace BlogIgor GjorgjievNo ratings yet
- Catalog FilterDocument89 pagesCatalog FilterAnangtri Wahyudi50% (2)
- Chapter IVDocument31 pagesChapter IVDaniel Madan Raja SNo ratings yet
- Chapter 8 Design of Infinite Impulse Response (IIR) Digital FiltersDocument9 pagesChapter 8 Design of Infinite Impulse Response (IIR) Digital FiltersJean Danny PhiliusNo ratings yet
- I 1 FiltersDocument45 pagesI 1 FiltersRica RdoNo ratings yet
- Linkwitz Riley CrossoversDocument6 pagesLinkwitz Riley Crossoversdonald141No ratings yet
- FiltersDocument34 pagesFiltersPrashant ChaharNo ratings yet