You might also like
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (844)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5810)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1092)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (348)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- 2023 Automation Trends Ebook UiPathDocument13 pages2023 Automation Trends Ebook UiPathSiddharth SNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- ChE461-Course Outline and Teaching ScheduleDocument2 pagesChE461-Course Outline and Teaching ScheduleAl JawadNo ratings yet
- The Certified Software Quality Engineer HandbookDocument55 pagesThe Certified Software Quality Engineer HandbookMutually Exclusive, Collectively Exhaustive50% (4)
- Abrir 02L085006 Service+Manual+VCF85Document85 pagesAbrir 02L085006 Service+Manual+VCF85Mauricio Cruz FigueroaNo ratings yet
- Start Up IndiaDocument24 pagesStart Up IndiaKratika SinghalNo ratings yet
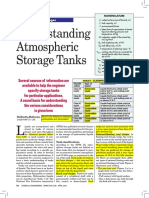
- ATM Storage TankDocument10 pagesATM Storage TankSteve WanNo ratings yet
- HART Vs Foundation Fieldbus - ComparisonDocument10 pagesHART Vs Foundation Fieldbus - ComparisonrajkumarpandeyNo ratings yet
- Steam Line Sizing CalculationsDocument11 pagesSteam Line Sizing Calculationssantosh_raju0% (1)
- GR&R Data Sheet GR&R Data Sheet: Variable Data Results - Total Variation Variable Data Results - Total VariationDocument4 pagesGR&R Data Sheet GR&R Data Sheet: Variable Data Results - Total Variation Variable Data Results - Total VariationRahulNo ratings yet
- Compresor CatalogoDocument1 pageCompresor CatalogoRedimido Gonzalez de LeonNo ratings yet
- Donaldson Pf-Eg Filter Housing. Process FluidDocument3 pagesDonaldson Pf-Eg Filter Housing. Process FluidluisNo ratings yet
- Constituent CommentDocument12 pagesConstituent CommentPressCitizen100% (1)
- The Nanotechnology Program Projects and NEDO's Project ManagementDocument2 pagesThe Nanotechnology Program Projects and NEDO's Project ManagementMazen SalabNo ratings yet
- LDB-PDB CalculationsDocument5 pagesLDB-PDB CalculationsJoshua CmNo ratings yet
- 20150306110342assignment Instructions (PPB3143 - 1 2014 2015)Document3 pages20150306110342assignment Instructions (PPB3143 - 1 2014 2015)Seth HowardNo ratings yet
- ECO 125 (Feb, 2020)Document72 pagesECO 125 (Feb, 2020)Michaell KingsNo ratings yet
- Historical Antecedents That Changed The Course of Science and TechnologyDocument7 pagesHistorical Antecedents That Changed The Course of Science and TechnologyShaila Mae VillegasNo ratings yet
- Gemini - Mixer EX-26 - Service ManualDocument13 pagesGemini - Mixer EX-26 - Service Manualapi-3711045No ratings yet
- IconicBathroom Vol3compressedDocument160 pagesIconicBathroom Vol3compressedAmit KumarNo ratings yet
- KKO-5 Oxygen SystemDocument34 pagesKKO-5 Oxygen SystemlmnduniaNo ratings yet
- Compiler Construction ToolsDocument2 pagesCompiler Construction Toolsbijay khadka100% (1)
- CN & cx200 Operators 50072 PDFDocument72 pagesCN & cx200 Operators 50072 PDFMohamed HarbNo ratings yet
- Integrated Power and Control Solutions (IPACS) Equipment: Selection GuideDocument8 pagesIntegrated Power and Control Solutions (IPACS) Equipment: Selection GuidetcNo ratings yet
- CSG TBG DimensionsDocument3 pagesCSG TBG DimensionsElisa Maria Angulo VanegasNo ratings yet
- Amphenol RET H6133100Document5 pagesAmphenol RET H6133100cristigoNo ratings yet
- Int 411 SyllabusDocument15 pagesInt 411 Syllabusapi-298228715No ratings yet
- Ob 11 Organisational - BehaviourDocument22 pagesOb 11 Organisational - BehaviourHarshil JoshiNo ratings yet
- KEB Combiperm DatasheetDocument1 pageKEB Combiperm DatasheetAmji ShahNo ratings yet
- EDC Lesson PlanDocument3 pagesEDC Lesson PlanArun Kumar Dhupam0% (1)
- Rundown Parallel SessionDocument8 pagesRundown Parallel SessionMuhammad HarisNo ratings yet