You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5814)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1092)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (845)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (348)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- SIRE Operator and Installation Manual V2R2Document124 pagesSIRE Operator and Installation Manual V2R2Eduardo Bortoli100% (1)
- OpenCOBOL Programmers GuideDocument259 pagesOpenCOBOL Programmers GuidezizazoNo ratings yet
- CS604 Operating Systems 2012 Mid Term Past Papers Mcqs Solved With References by MoaazDocument35 pagesCS604 Operating Systems 2012 Mid Term Past Papers Mcqs Solved With References by MoaazShahrukh Usman50% (2)
- Practical - 3Document8 pagesPractical - 3VivekNo ratings yet
- 1 TB HDD Exact Size Use - Google SearchDocument1 page1 TB HDD Exact Size Use - Google SearchGanesh BhattaraiNo ratings yet
- SAP Analysis MS 27Document20 pagesSAP Analysis MS 27kumar mNo ratings yet
- Video Door Phone CatalogDocument16 pagesVideo Door Phone CatalogManoj Krishna MoreNo ratings yet
- Estimate WK155234221MLDocument1 pageEstimate WK155234221MLSharif HayudiniNo ratings yet
- BP5116DJ Data SheetDocument2 pagesBP5116DJ Data SheetIlijavkNo ratings yet
- Satellite Communications: Communication Systems II Fourth YearDocument15 pagesSatellite Communications: Communication Systems II Fourth YearMustfa AhmedNo ratings yet
- Cas Ci-150aDocument32 pagesCas Ci-150ahendy febrianiNo ratings yet
- Interview Questions-1Document41 pagesInterview Questions-1ChaitanyaBv100% (2)
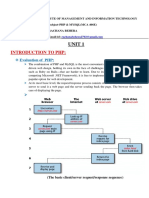
- PHP PDFDocument85 pagesPHP PDFDibyas Sanjay Dubey100% (1)
- LM1117 800-Ma, Low-Dropout Linear Regulator: 1 Features 3 DescriptionDocument41 pagesLM1117 800-Ma, Low-Dropout Linear Regulator: 1 Features 3 DescriptionWelleyNo ratings yet
- Macro Processors Chap4Document11 pagesMacro Processors Chap4Anonymous jpeHV73mLzNo ratings yet
- Python Project ReportDocument25 pagesPython Project ReportShanaya Gaharana33% (3)
- Numark Party Mix Serato DJ Lite Quick-Start GuideDocument5 pagesNumark Party Mix Serato DJ Lite Quick-Start GuideernestasNo ratings yet
- FreeBSD Journal May/June 2023Document56 pagesFreeBSD Journal May/June 2023R. Tyler CroyNo ratings yet
- CharacteristicsDocument6 pagesCharacteristicsN Latha ReddyNo ratings yet
- AM12 Best Practices For Dynamics NAV Administration and SecurityDocument24 pagesAM12 Best Practices For Dynamics NAV Administration and Securitypierrejudej8607No ratings yet
- 02 Message Passing Interface TutorialDocument34 pages02 Message Passing Interface TutorialFrederic MenezesNo ratings yet
- Ursala - Notational Innovations For Rapid Application DevelopmentDocument499 pagesUrsala - Notational Innovations For Rapid Application DevelopmentDarthShrineNo ratings yet
- Cisco Webex Calling Service DescriptionDocument42 pagesCisco Webex Calling Service DescriptionJaime SolorioNo ratings yet
- HDDFaulty c0t0d0 OutputDocument12 pagesHDDFaulty c0t0d0 OutputrejnanNo ratings yet
- Configuring Secure Domain Routers On Cisco IOS XR SoftwareDocument28 pagesConfiguring Secure Domain Routers On Cisco IOS XR Softwaresumanth83137No ratings yet
- Regulador Advanced SC 414Document29 pagesRegulador Advanced SC 414Paulo SilvaNo ratings yet
- Chapter Three Introduction To Digital Telecom Transmission and ApplicationsDocument80 pagesChapter Three Introduction To Digital Telecom Transmission and ApplicationsTibebu Xibe TeNo ratings yet
- 5G Ebook PDFDocument50 pages5G Ebook PDFRekha NairNo ratings yet
- AN12323 - S32K1xx Firmware UpdatesDocument44 pagesAN12323 - S32K1xx Firmware UpdatesNguyễn Mỹ KiênNo ratings yet
- Enterprise Manager Cloud Control 12c Best Practice Guide: Monitoring Oracle Forms Using Real User Experience InsightDocument57 pagesEnterprise Manager Cloud Control 12c Best Practice Guide: Monitoring Oracle Forms Using Real User Experience InsightKoushikKc ChatterjeeNo ratings yet