You might also like
- Advanced-Nonlinear - SOL 601Document3 pagesAdvanced-Nonlinear - SOL 601devNo ratings yet
- Integration of One-forms on P-adic Analytic Spaces. (AM-162)From EverandIntegration of One-forms on P-adic Analytic Spaces. (AM-162)No ratings yet
- NX Nastran Advanced Nonlinear - Solution 601/701: Siemens PLM SoftwareDocument3 pagesNX Nastran Advanced Nonlinear - Solution 601/701: Siemens PLM Softwarethreshold71No ratings yet
- Manual Sobre Software RoSo3Document2 pagesManual Sobre Software RoSo3Dhayann C. MuñozNo ratings yet
- Optimal Design of Flexural Systems: Beams, Grillages, Slabs, Plates and ShellsFrom EverandOptimal Design of Flexural Systems: Beams, Grillages, Slabs, Plates and ShellsRating: 5 out of 5 stars5/5 (1)
- Pemodelan Struktur (Kuliah As3)Document144 pagesPemodelan Struktur (Kuliah As3)Bogie Prastowo MahardhikaNo ratings yet
- Wave Propagation: From Electrons to Photonic Crystals and Left-Handed MaterialsFrom EverandWave Propagation: From Electrons to Photonic Crystals and Left-Handed MaterialsNo ratings yet
- Abaqus CAE DatasheetDocument4 pagesAbaqus CAE Datasheetadnan-651358No ratings yet
- Choose TurbDocument5 pagesChoose Turbabu khuzaifahNo ratings yet
- ABP Fluent 2021R2 External Aero Automotive v0Document94 pagesABP Fluent 2021R2 External Aero Automotive v0PrabhakaranGopalNo ratings yet
- Deform - 2D: Product SpecificationsDocument1 pageDeform - 2D: Product SpecificationsHenry ArzeNo ratings yet
- Abaqus/Explicit 2017 Data Sheet: Analysis Types Material DefinitionsDocument2 pagesAbaqus/Explicit 2017 Data Sheet: Analysis Types Material DefinitionsMatias GentileNo ratings yet
- Introduction To: Elmer FEM SoftwareDocument29 pagesIntroduction To: Elmer FEM SoftwareRonnaruchitNo ratings yet
- 2018-3-27 MIDAS Civil Presentation Curved BridgesDocument57 pages2018-3-27 MIDAS Civil Presentation Curved BridgesShishir Kumar NayakNo ratings yet
- Solid Shell ElementDocument136 pagesSolid Shell Element2gangadharaNo ratings yet
- Puentes Basado en Desplazamiento 5Document43 pagesPuentes Basado en Desplazamiento 5Juan David CarvajalNo ratings yet
- NX Nastran Advanced Nonlinear - Solution 601/701: BenefitsDocument3 pagesNX Nastran Advanced Nonlinear - Solution 601/701: BenefitsramabaruvaNo ratings yet
- Solidworks Simulation StandardDocument110 pagesSolidworks Simulation Standardsherwin perezNo ratings yet
- Finite ElementDocument4 pagesFinite Elementdina gunasekeraNo ratings yet
- NEFeatures v83Document6 pagesNEFeatures v83rishit_aNo ratings yet
- Day 1 - Part 2 Introducing SimlabDocument43 pagesDay 1 - Part 2 Introducing SimlabFaroukh RashidNo ratings yet
- Collapse SACSDocument59 pagesCollapse SACSMurali Bharadwaj100% (1)
- Re MeshingDocument138 pagesRe MeshingNguyễn TúNo ratings yet
- LS DynaDocument3 pagesLS Dynarishit_aNo ratings yet
- Brochure Abaqus Explicit PDFDocument2 pagesBrochure Abaqus Explicit PDFOmar FrancoNo ratings yet
- NX Nastran Advanced Nonlinear - Solution 601-701Document3 pagesNX Nastran Advanced Nonlinear - Solution 601-701Rubén GabrielNo ratings yet
- WmdemotoolkitproDocument7 pagesWmdemotoolkitproyc3879No ratings yet
- FEA Knowledge 1.3Document20 pagesFEA Knowledge 1.3APURV THE Black Horse DRVNo ratings yet
- Lecture 32Document45 pagesLecture 32diwali 2022No ratings yet
- Builder 2017Document2 pagesBuilder 2017Emad KhanNo ratings yet
- 1 - FEM IntroductionDocument32 pages1 - FEM IntroductionmuhammadjasoorNo ratings yet
- Unwedge CriteriaDocument2 pagesUnwedge CriteriaLeandroNo ratings yet
- Very Basic GSADocument46 pagesVery Basic GSATim ChongNo ratings yet
- 322 F22 Lecture15 Plasticity Vs Defects1Document59 pages322 F22 Lecture15 Plasticity Vs Defects1lokeshNo ratings yet
- Explicit Drop Test and Submodeling With ANSYS LS-DYNA: Chris CowanDocument22 pagesExplicit Drop Test and Submodeling With ANSYS LS-DYNA: Chris CowanAnkush HNo ratings yet
- Building Structures Modeling and Analysis ConceptsDocument78 pagesBuilding Structures Modeling and Analysis ConceptssmazNo ratings yet
- T3 Complete PDFDocument8 pagesT3 Complete PDFJavico VasquezNo ratings yet
- Workshop Slides EVERFEDocument52 pagesWorkshop Slides EVERFEtauquilNo ratings yet
- NEL1 v83Document3 pagesNEL1 v83rishit_aNo ratings yet
- Top-Down Triage Method For SimulationDocument3 pagesTop-Down Triage Method For SimulationrajuhaveriNo ratings yet
- 6522ENG Lecture6Document32 pages6522ENG Lecture6Junaid AshrafNo ratings yet
- Forming ModulesDocument2 pagesForming ModulesSantosh Kumar KushwahaNo ratings yet
- DIANA 10 1 Brochure Oct 2017 Print Version PDFDocument4 pagesDIANA 10 1 Brochure Oct 2017 Print Version PDFAndi MapppaerangNo ratings yet
- 4 - DSM Design GuideDocument25 pages4 - DSM Design GuideLJ ClimacoNo ratings yet
- Ansys Capabilities 12 1Document4 pagesAnsys Capabilities 12 1Meysam MagharehNo ratings yet
- 2012 Geotechnical Solutions Print VersionDocument4 pages2012 Geotechnical Solutions Print Versiondina gunasekeraNo ratings yet
- AnsysDocument14 pagesAnsysRavi NPDNo ratings yet
- 0 - Introduction To DIANA PDFDocument49 pages0 - Introduction To DIANA PDFMaría Elena Novelo ArjonaNo ratings yet
- ME303 Wk02 Kinematics Load Determination PDFDocument23 pagesME303 Wk02 Kinematics Load Determination PDF许戎汉No ratings yet
- Automatic Contact GenerationDocument2 pagesAutomatic Contact GenerationShailesh_Fulse_7437No ratings yet
- AAC Interiors DesignDocument23 pagesAAC Interiors DesignsssramyaNo ratings yet
- Numerical Simulations of A Back Grinding Process For Silicon WafersDocument43 pagesNumerical Simulations of A Back Grinding Process For Silicon WafersAnthony GalayNo ratings yet
- Machining, Drawing & SolidworksDocument9 pagesMachining, Drawing & Solidworksmadi100% (1)
- Slide2 Product SheetDocument2 pagesSlide2 Product SheetpiconcarlosNo ratings yet
- Analysis Methods For Fatigue of Welds: Jeff Mentley HBM - Ncode ProductsDocument52 pagesAnalysis Methods For Fatigue of Welds: Jeff Mentley HBM - Ncode ProductsEvelin StefanovNo ratings yet
- Deform 3D PDFDocument2 pagesDeform 3D PDFSausiri JhNo ratings yet
- FE Analysis of Hollow Propeller ShaftDocument2 pagesFE Analysis of Hollow Propeller ShaftJeba ChristoNo ratings yet
- Reinforced Concrete Design: (CIVL 3320)Document23 pagesReinforced Concrete Design: (CIVL 3320)taiman chanNo ratings yet
- Finite Element Analysis of Epitaxial Thin Film Growth: Anandh SubramaniamDocument36 pagesFinite Element Analysis of Epitaxial Thin Film Growth: Anandh SubramaniamSalam FaithNo ratings yet
- 7 CSDL ESTOFS Status 16may2011Document10 pages7 CSDL ESTOFS Status 16may2011Salam FaithNo ratings yet
- Pricnciple of Modeling Textile CompositeDocument48 pagesPricnciple of Modeling Textile CompositeSalam FaithNo ratings yet
- Performance Analysis Tools Applied To A Finite Adaptive Mesh Free Boundary Seepage Parallel AlgorithmDocument62 pagesPerformance Analysis Tools Applied To A Finite Adaptive Mesh Free Boundary Seepage Parallel AlgorithmSalam FaithNo ratings yet
- Chapt.11 (Finite Element Analysis)Document39 pagesChapt.11 (Finite Element Analysis)Salam FaithNo ratings yet
- Pricnciple of Modeling Textile CompositeDocument48 pagesPricnciple of Modeling Textile CompositeSalam FaithNo ratings yet
- Buckling 07Document31 pagesBuckling 07Salam FaithNo ratings yet
- Habitat For Space and Lunar Environments - Light Weight Structure ConceptDocument47 pagesHabitat For Space and Lunar Environments - Light Weight Structure ConceptSalam FaithNo ratings yet
- Dynamic Portfolio Optimization Using Decomposition and Finite Element MethodsDocument42 pagesDynamic Portfolio Optimization Using Decomposition and Finite Element MethodsSalam FaithNo ratings yet
- A New Finite-Element Model of The Hayward Fault: Michael BarallDocument53 pagesA New Finite-Element Model of The Hayward Fault: Michael BarallSalam FaithNo ratings yet
- ACOP Preliminary Structural Analysis For PDR (I) : Jih-Long Tsai, Meng Lung Liu December 1, 2004Document23 pagesACOP Preliminary Structural Analysis For PDR (I) : Jih-Long Tsai, Meng Lung Liu December 1, 2004Salam FaithNo ratings yet
- Practical Application of Finite Element Analysis To The Design of Post-Tensioned and Reinforced Concrete FloorsDocument104 pagesPractical Application of Finite Element Analysis To The Design of Post-Tensioned and Reinforced Concrete FloorsSalam FaithNo ratings yet
- A "Simple Beam" Revisited: Roland PruklDocument36 pagesA "Simple Beam" Revisited: Roland PruklSalam FaithNo ratings yet
- Hierarchical Multi-Resolution Finite Element Model For Soft Body SimulationDocument57 pagesHierarchical Multi-Resolution Finite Element Model For Soft Body SimulationSalam FaithNo ratings yet
- Mechanical Engineering University of Alabama at BirminghamDocument22 pagesMechanical Engineering University of Alabama at BirminghamSalam FaithNo ratings yet
- 12 Annual FWD Users Group Meeting: FWD Wave Propagation Modelling and Equipment Calibration Christ Van Gurp - KOAC - WMDDocument42 pages12 Annual FWD Users Group Meeting: FWD Wave Propagation Modelling and Equipment Calibration Christ Van Gurp - KOAC - WMDSalam FaithNo ratings yet
- Lecture 07 Mechanical Properties 2Document20 pagesLecture 07 Mechanical Properties 2antoine demeireNo ratings yet
- Lateral Stability of Reinforced Concrete Columns Under Axial Reversed Cyclic Tension and CompressionDocument10 pagesLateral Stability of Reinforced Concrete Columns Under Axial Reversed Cyclic Tension and CompressionMirellaNo ratings yet
- Walker and Mayes - SPE-4975-PADocument8 pagesWalker and Mayes - SPE-4975-PALogan LumNo ratings yet
- Work Power Energy Formula SheetDocument5 pagesWork Power Energy Formula SheetAman Singh100% (1)
- Stone Masonry Breast Wall - 2.0 MDocument6 pagesStone Masonry Breast Wall - 2.0 Mrahul sumanNo ratings yet
- PC1431 Assignment 4 AnswersDocument22 pagesPC1431 Assignment 4 AnswersMikael Lee100% (15)
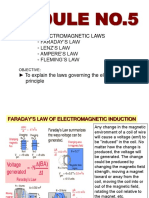
- Module 5 - DC MachDocument8 pagesModule 5 - DC MachNoel BactonNo ratings yet
- Uu TestDocument15 pagesUu TestMin MiynNo ratings yet
- 1a. Work Power Energy - Synopsis (1-29)Document29 pages1a. Work Power Energy - Synopsis (1-29)syedphy4272No ratings yet
- Drobac Stimac-Grandic - GNP2020Document8 pagesDrobac Stimac-Grandic - GNP2020jug.drobacNo ratings yet
- Introduction To Chemical Engineering Thermodynamics: Prepared by A. R. Caparanga, PHD For Ch126PDocument35 pagesIntroduction To Chemical Engineering Thermodynamics: Prepared by A. R. Caparanga, PHD For Ch126PDOZPandaNo ratings yet
- Introduction To Vibration and Pulsation in Reciprocating Compressors 1 PDFDocument28 pagesIntroduction To Vibration and Pulsation in Reciprocating Compressors 1 PDFSandeep BhatiaNo ratings yet
- Double Integration Method: Beam DeflectionsDocument52 pagesDouble Integration Method: Beam DeflectionsGiana Valerie PiacosNo ratings yet
- Kinematics Crime Scene - SolutionsDocument3 pagesKinematics Crime Scene - SolutionsNguyễn Anh ThưNo ratings yet
- PROBLEMS ChapP08Document6 pagesPROBLEMS ChapP08Riad El AbedNo ratings yet
- A Code of Practice For The Determination of Cyclic Stress-StrainDocument22 pagesA Code of Practice For The Determination of Cyclic Stress-StrainDeivyson AugustoNo ratings yet
- Short Handbook Thermodynamics11005Document17 pagesShort Handbook Thermodynamics11005Max NighswanderNo ratings yet
- Crash EquationsDocument4 pagesCrash Equationsskizzy100% (1)
- Polypropylene Practical GuideDocument40 pagesPolypropylene Practical Guidejotadislexia100% (1)
- Design and Analysis of Three Rotor Rotary EngineDocument10 pagesDesign and Analysis of Three Rotor Rotary EngineIRJMETS JOURNALNo ratings yet
- Mechanical Vibrations: Jeff Rhoads and Terry BallingerDocument29 pagesMechanical Vibrations: Jeff Rhoads and Terry Ballingershweta_of_s100% (1)
- The Lift Force On A Spherical Body in A Rotational FlowDocument20 pagesThe Lift Force On A Spherical Body in A Rotational FlowARUN KRISHNA B J am21d400No ratings yet
- Thermodynamics Chapter 2 Lec1Document8 pagesThermodynamics Chapter 2 Lec1ahmadalsaiahNo ratings yet
- Mere NotesDocument47 pagesMere NotesRakeshKumarNo ratings yet
- Entire Physics NotebookDocument19 pagesEntire Physics NotebookMEAGAN MENORNo ratings yet
- Phase Transition Dynamics, Onuki A, CUP 2002Document725 pagesPhase Transition Dynamics, Onuki A, CUP 2002Ionut Florica100% (1)
- (Iv) Chain Drives - Roller Chains, Polygonal Effect, Power Rating, Sprocket Wheel, Silent ChainDocument1 page(Iv) Chain Drives - Roller Chains, Polygonal Effect, Power Rating, Sprocket Wheel, Silent ChainArterixpestcontrolNo ratings yet
- Physics 162 Activity 4Document3 pagesPhysics 162 Activity 4Ferhaeeza KalayakanNo ratings yet
- Som, SA - Polity 04-Aug-2021Document12 pagesSom, SA - Polity 04-Aug-2021soham trivediNo ratings yet
- Vibration of Spiral SpringDocument11 pagesVibration of Spiral SpringAbdul Rafaeh100% (1)