You might also like
- iHorizon-Enabled Energy Management for Electrified VehiclesFrom EverandiHorizon-Enabled Energy Management for Electrified VehiclesNo ratings yet
- Adaptive Cruise ControlDocument20 pagesAdaptive Cruise ControlMohammad ThanzimNo ratings yet
- Adaptive Cruise Control System: Nikhil RDocument20 pagesAdaptive Cruise Control System: Nikhil RsidjivNo ratings yet
- Fully Autonomous Vehicles: Visions of the future or still reality?From EverandFully Autonomous Vehicles: Visions of the future or still reality?No ratings yet
- Adaptive Cruise ControlDocument7 pagesAdaptive Cruise ControlRohit SharmaNo ratings yet
- 25977-Automobile Sensors May Usher in Self Driving Cars PDFDocument6 pages25977-Automobile Sensors May Usher in Self Driving Cars PDFSandrawarman BalasundramNo ratings yet
- Adaptive Cruise Control Seminar ReportDocument3 pagesAdaptive Cruise Control Seminar ReportKnightmare 007No ratings yet
- Adaptive Cruise ControlDocument10 pagesAdaptive Cruise ControlMadhuri ChowdaryNo ratings yet
- Autonomous Car: A.Sivanagaraju P.Naga SudhakarDocument8 pagesAutonomous Car: A.Sivanagaraju P.Naga SudhakarSiva NagarajuNo ratings yet
- Acc ppt-1Document17 pagesAcc ppt-1Mandeep Singh SanghotreaNo ratings yet
- Automotive RadarDocument6 pagesAutomotive RadarRaushan SinghNo ratings yet
- ADAS (Advance Driver Assistance System)Document18 pagesADAS (Advance Driver Assistance System)Jino PrinceNo ratings yet
- Adaptive Cruise Control SystemDocument5 pagesAdaptive Cruise Control SystemSathish KumarNo ratings yet
- Abs DTCDocument118 pagesAbs DTCDenCom DzNo ratings yet
- Presentation On Automotive Sensors: Presented BYDocument36 pagesPresentation On Automotive Sensors: Presented BYTarun BansalNo ratings yet
- Basics of automotive electronics: Understanding controller area networks (CANDocument11 pagesBasics of automotive electronics: Understanding controller area networks (CANkrishaNo ratings yet
- UDS Protocol Diagnostics CommunicationDocument6 pagesUDS Protocol Diagnostics CommunicationaravindNo ratings yet
- AUTOSAR Software Engineering PraktikumDocument10 pagesAUTOSAR Software Engineering PraktikumFarwa ZahidNo ratings yet
- Adaptive Cruise ControlDocument25 pagesAdaptive Cruise ControlAnu Prasad100% (1)
- Automotive SystemsDocument12 pagesAutomotive SystemsLau YeowhongNo ratings yet
- Automated Emergency Brake Systems: Technical Requirements, Costs and BenefitsDocument154 pagesAutomated Emergency Brake Systems: Technical Requirements, Costs and BenefitsBrandy WilliamsNo ratings yet
- Adas ContentsDocument8 pagesAdas ContentsM venkata Subramanyam100% (1)
- Design Process Hardware Autosar: Present Problems The Autosar StandardDocument3 pagesDesign Process Hardware Autosar: Present Problems The Autosar StandardJnsk SrinuNo ratings yet
- Auto Pilot Mode Technology in VehiclesDocument21 pagesAuto Pilot Mode Technology in VehiclesSowmya50% (2)
- Demonstration OF Braking SYSTEM of An EngineDocument13 pagesDemonstration OF Braking SYSTEM of An EngineKryptonNo ratings yet
- A Case Study On Power Train in Supra 2011 and 2012Document11 pagesA Case Study On Power Train in Supra 2011 and 2012Murali S Krishnan100% (1)
- Automatic Simulation Measurement and Verification of Inputs and Outputs of Body Control ModuleDocument4 pagesAutomatic Simulation Measurement and Verification of Inputs and Outputs of Body Control ModuleInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Anti-Lock and Automatic Breaking SystemDocument4 pagesAnti-Lock and Automatic Breaking SystemMuhammad Rifqi PinandhitoNo ratings yet
- AU201 SI Engines and CombustionDocument3 pagesAU201 SI Engines and CombustionvaisakmctNo ratings yet
- RehanDocument27 pagesRehanRehan Khan0% (1)
- Vector XCP Basics enDocument3 pagesVector XCP Basics enthoroftedalNo ratings yet
- Shijo.T.Daniel S5 Mechanical Roll No: 859 REG NO: 11020125Document28 pagesShijo.T.Daniel S5 Mechanical Roll No: 859 REG NO: 11020125sinasayedanaNo ratings yet
- CAN ProtocolDocument9 pagesCAN Protocolhaythem.mejri.proNo ratings yet
- Chapter3 Automotive Embedded ApplicationsDocument156 pagesChapter3 Automotive Embedded ApplicationsKomal KalkutkarNo ratings yet
- dSPACENews2006-3 AutomationDesk en Pn422Document2 pagesdSPACENews2006-3 AutomationDesk en Pn422TYu4443No ratings yet
- Fault Tolerance in Automotive Systems - ReportDocument10 pagesFault Tolerance in Automotive Systems - ReportJagat RathNo ratings yet
- Red Bend Update Car Ecu PDFDocument14 pagesRed Bend Update Car Ecu PDFtomsiriNo ratings yet
- ADASDocument211 pagesADASdb100% (1)
- CANBUS InfoDocument19 pagesCANBUS InfoBenito Camela100% (1)
- The Use of Radar in The Field of Automotive As An Effort To Increase Human SafetyDocument58 pagesThe Use of Radar in The Field of Automotive As An Effort To Increase Human SafetyMoh. Ali FauziNo ratings yet
- Types of Automotive Braking Systems: Brake ComponentsDocument5 pagesTypes of Automotive Braking Systems: Brake ComponentsAsmaa Ahmad SharawyNo ratings yet
- Automotive Radar - From Its Origins To Future DirectionsDocument8 pagesAutomotive Radar - From Its Origins To Future Directionsmadhu_g100% (1)
- Dspace-Paper Hil Overview Waeltermann e 160405 PDFDocument14 pagesDspace-Paper Hil Overview Waeltermann e 160405 PDFPranay VermaNo ratings yet
- Autosar Sws DiagnosticoveripDocument127 pagesAutosar Sws DiagnosticoveripStefan RuscanuNo ratings yet
- CHAPTER 1: AUTOSAR Fundamentals Topics CoveredDocument14 pagesCHAPTER 1: AUTOSAR Fundamentals Topics CoveredSujit KumarNo ratings yet
- 05 ActuatorDocument15 pages05 ActuatorEnoch MwesigwaNo ratings yet
- Security and Safety in Embedded ApplicationsDocument14 pagesSecurity and Safety in Embedded ApplicationsLinh Lê QuangNo ratings yet
- Adaptive Cruise Control ReportDocument20 pagesAdaptive Cruise Control ReportRohan BalramNo ratings yet
- Autosar PPTDocument10 pagesAutosar PPTRahul WaliNo ratings yet
- Immobilizer 3 Measuring BlocksDocument4 pagesImmobilizer 3 Measuring BlocksMauricioNo ratings yet
- Microautobox II DspaceDocument24 pagesMicroautobox II DspacehieuhuechchNo ratings yet
- CANoe ProductInformation ENDocument57 pagesCANoe ProductInformation ENpawan waghNo ratings yet
- Waveform Design for Automotive Radar SystemsDocument4 pagesWaveform Design for Automotive Radar SystemsAarav K SNo ratings yet
- Sae j1962 1995 PDFDocument8 pagesSae j1962 1995 PDFmiguelcastilloNo ratings yet
- Google's Self Driven Concept Car: Presented To You By: Shivam Kumar Bca 1 YearDocument21 pagesGoogle's Self Driven Concept Car: Presented To You By: Shivam Kumar Bca 1 YearShivam KumarNo ratings yet
- Intelligent Vehicle Systems-Automotive ElectronicsDocument80 pagesIntelligent Vehicle Systems-Automotive ElectronicssaavanakumarNo ratings yet
- Job Opportunity Bootloader Specialist at Elektrobit Automotive GMBH Jobportal1Document3 pagesJob Opportunity Bootloader Specialist at Elektrobit Automotive GMBH Jobportal1krishaNo ratings yet
- Embedded System in AutomobilesDocument42 pagesEmbedded System in AutomobilesManpreet SinghNo ratings yet
- H Da Barth Functional Safety On MulticoreDocument23 pagesH Da Barth Functional Safety On Multicores.b.v.seshagiri1407No ratings yet
- Adaptive Cruise Control: A Seminar Report OnDocument22 pagesAdaptive Cruise Control: A Seminar Report Onpradeep nayakNo ratings yet
- Adaptive Cruise Control Seminar: Sensors, Controllers & Cooperative SystemsDocument21 pagesAdaptive Cruise Control Seminar: Sensors, Controllers & Cooperative Systemspradeep nayakNo ratings yet
- Adaptive Cruise Control: A Seminar Report OnDocument22 pagesAdaptive Cruise Control: A Seminar Report Onpradeep nayakNo ratings yet
- Adaptive Cruise Control: A Seminar Report OnDocument22 pagesAdaptive Cruise Control: A Seminar Report Onpradeep nayakNo ratings yet
- Adaptive Cruise Control: A Seminar Report OnDocument22 pagesAdaptive Cruise Control: A Seminar Report Onpradeep nayakNo ratings yet
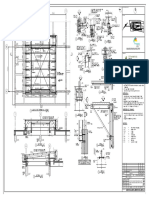
- Kia Stu B05 LRD 466080 La ST DWG 0016 - R1Document1 pageKia Stu B05 LRD 466080 La ST DWG 0016 - R1Bhavanishankar shettyNo ratings yet
- 46.2-844. Passing Stopped School Buses Penalty Prima Facie EvidenceDocument2 pages46.2-844. Passing Stopped School Buses Penalty Prima Facie EvidenceWSETNo ratings yet
- Boq NatmDocument14 pagesBoq NatmAnonymous USbc7XzsA6No ratings yet
- Form 20: Application For Registration of A Motor VehicleDocument4 pagesForm 20: Application For Registration of A Motor VehicleZameer KhanNo ratings yet
- Outside Fare Zones: Key To Symbols Explanation of ZonesDocument1 pageOutside Fare Zones: Key To Symbols Explanation of ZoneslopesgilNo ratings yet
- Complete Streets Design Guideline Manual 1Document86 pagesComplete Streets Design Guideline Manual 1Tariq ToffaNo ratings yet
- 2012-2013 Housing GuideDocument68 pages2012-2013 Housing GuidePrasad MaratheNo ratings yet
- For Print A3 Batch 1 DPWH Excavation PermitDocument14 pagesFor Print A3 Batch 1 DPWH Excavation PermitDyeri FloresNo ratings yet
- Design & Build Bridges Nepal 2077-2078Document5 pagesDesign & Build Bridges Nepal 2077-2078Pradeep PokhrelNo ratings yet
- Thickness Design: General ConsiderationsDocument7 pagesThickness Design: General ConsiderationsIbnuyusoff77No ratings yet
- Check For Box Culvert SlidingDocument6 pagesCheck For Box Culvert SlidingNilay GandhiNo ratings yet
- Bulldozer Operator SOPDocument3 pagesBulldozer Operator SOPJacksmith ThadiusNo ratings yet
- Parts of A CarDocument5 pagesParts of A CarMaria MolinaNo ratings yet
- Operacion Roc D65 A DistanciaDocument26 pagesOperacion Roc D65 A DistanciaEnzo Piero Saez Gallardo100% (2)
- Lateral Load in Pile - NEHRPDocument57 pagesLateral Load in Pile - NEHRPrmm99rmm99No ratings yet
- DUPA (Revised) PDFDocument12 pagesDUPA (Revised) PDFRolly Marc G. SoteloNo ratings yet
- Fdot Modifications To LRFD Specifications For Structural Supports For Highway Signs, Luminaires and Traffic Signals (Lrfdlts-1)Document26 pagesFdot Modifications To LRFD Specifications For Structural Supports For Highway Signs, Luminaires and Traffic Signals (Lrfdlts-1)kayshephNo ratings yet
- CCSF - Mayor's Office On Disability - DPW - Scaffolding Policy - Order NoDocument1 pageCCSF - Mayor's Office On Disability - DPW - Scaffolding Policy - Order NoprowagNo ratings yet
- Coahing Institution To Become An I.A.SDocument4 pagesCoahing Institution To Become An I.A.SShachin ShibiNo ratings yet
- Grizzly Kit Catalogue - Oct 2014Document792 pagesGrizzly Kit Catalogue - Oct 2014grizzlyseals100% (1)
- CIVE 601 P6 Lab HandoutsDocument4 pagesCIVE 601 P6 Lab HandoutsPramod Kumar DwivediNo ratings yet
- Abermawr Woods and Beach Walk WalkingDocument1 pageAbermawr Woods and Beach Walk WalkingrayasanderNo ratings yet
- Automobile Research and Training Institute at AurangabadDocument17 pagesAutomobile Research and Training Institute at AurangabadAKASH DAYALNo ratings yet
- D ManCivil4thsemTTDocument253 pagesD ManCivil4thsemTTsathishNo ratings yet
- History of TransportationDocument14 pagesHistory of TransportationRAYMOND CALSADANo ratings yet
- INTEGRAL BRIDGES: ANALYSIS AND ADVANTAGESDocument22 pagesINTEGRAL BRIDGES: ANALYSIS AND ADVANTAGESmanu_696100% (2)
- National Road Safety Strategy 2018-2030Document86 pagesNational Road Safety Strategy 2018-2030gul_aghaNo ratings yet
- CecabasertDocument3 pagesCecabasertanggiefebriyantoNo ratings yet
- Underground Damage Prevention Penalties 2011-2012Document833 pagesUnderground Damage Prevention Penalties 2011-2012CBS 11 NewsNo ratings yet