You might also like
- Modern Anti-windup Synthesis: Control Augmentation for Actuator SaturationFrom EverandModern Anti-windup Synthesis: Control Augmentation for Actuator SaturationRating: 5 out of 5 stars5/5 (1)
- Crossmark: Control Engineering PracticeDocument13 pagesCrossmark: Control Engineering PracticeLê Đức ThịnhNo ratings yet
- Quadrotor Aircraft Attitude Estimation and Control Based On Kalman FilterDocument6 pagesQuadrotor Aircraft Attitude Estimation and Control Based On Kalman FilterRifqi ZainNo ratings yet
- Advances in Motion Sensing and Control for Robotic Applications: Selected Papers from the Symposium on Mechatronics, Robotics, and Control (SMRC’18)- CSME International Congress 2018, May 27-30, 2018 Toronto, CanadaFrom EverandAdvances in Motion Sensing and Control for Robotic Applications: Selected Papers from the Symposium on Mechatronics, Robotics, and Control (SMRC’18)- CSME International Congress 2018, May 27-30, 2018 Toronto, CanadaFarrokh Janabi-SharifiNo ratings yet
- Fully Quaternion BasedDocument29 pagesFully Quaternion Basednguyễn công nghĩaNo ratings yet
- Abstract: Crude Oil Transport Is An Essential Task in OilDocument4 pagesAbstract: Crude Oil Transport Is An Essential Task in OilJetalNo ratings yet
- (2017) - A Novel Approach To Study Effects of Asymmetric Stiffness On Parametric Instabilities of Multi-Rotor-SystemDocument14 pages(2017) - A Novel Approach To Study Effects of Asymmetric Stiffness On Parametric Instabilities of Multi-Rotor-SystemAgustín Erasmo Juárez MartínezNo ratings yet
- 4 UnbalanceDocument9 pages4 Unbalancerola mohamedNo ratings yet
- Effect of Generator Parameters Inaccuracy On Transient Stability PerformanceDocument5 pagesEffect of Generator Parameters Inaccuracy On Transient Stability PerformancesumathyNo ratings yet
- Engineering Applications of Artificial Intelligence: A. Rahideh, A.H. Bajodah, M.H. ShaheedDocument9 pagesEngineering Applications of Artificial Intelligence: A. Rahideh, A.H. Bajodah, M.H. ShaheedsaeedNo ratings yet
- Syllabus Em731 2012Document8 pagesSyllabus Em731 2012LuigiNo ratings yet
- Vibrations - NptelDocument3 pagesVibrations - NptelMSK65No ratings yet
- IPMSM control using MTPA based adaptive fractional sliding modeDocument13 pagesIPMSM control using MTPA based adaptive fractional sliding modeKev NgoNo ratings yet
- Estimation and Active Damping of Unbalance Forces in Jeffcott-Like Rotor-Bearing SystemsDocument22 pagesEstimation and Active Damping of Unbalance Forces in Jeffcott-Like Rotor-Bearing SystemsAnonymous LU3Dz3TKtVNo ratings yet
- Articulo 3Document14 pagesArticulo 3Angel RodriguezNo ratings yet
- STEERING TORQUE CONTROL USING VARIABLE IMPEDANCE Model For A Steer by Wire SystemDocument8 pagesSTEERING TORQUE CONTROL USING VARIABLE IMPEDANCE Model For A Steer by Wire SystemCigifarmNo ratings yet
- Pitch and Yaw Attitude Control of A Rocket Engine Using Hybrid Fuzzy-PID ControllerDocument11 pagesPitch and Yaw Attitude Control of A Rocket Engine Using Hybrid Fuzzy-PID ControllermaryamNo ratings yet
- Department of Mechanical Engineering Dynamics Laboratory Manual Iii Year / V SemesterDocument42 pagesDepartment of Mechanical Engineering Dynamics Laboratory Manual Iii Year / V SemesterSathrudhan ChoudharyNo ratings yet
- IOP Conference Series: Materials Science and Engineering ModelingDocument20 pagesIOP Conference Series: Materials Science and Engineering ModelingValerian SanduNo ratings yet
- Tsourdos2005 Adaptive Flight Control Design For Nonlinear MissileDocument10 pagesTsourdos2005 Adaptive Flight Control Design For Nonlinear MissileSaeb AmirAhmadi ChomacharNo ratings yet
- Theme 2 (Revision) Introduction of Industrial Robot - Manipulators - Ver 1. of Doz Ivan Avramov 28 Jan 2021Document48 pagesTheme 2 (Revision) Introduction of Industrial Robot - Manipulators - Ver 1. of Doz Ivan Avramov 28 Jan 2021stanimirNo ratings yet
- TRMS State Feedback 1Document5 pagesTRMS State Feedback 1KKWNo ratings yet
- Euler and Quaternion Parameterization in VTOL UAVDocument5 pagesEuler and Quaternion Parameterization in VTOL UAVNoor DullaertNo ratings yet
- QuadDocument2 pagesQuadPranoy MukherjeeNo ratings yet
- Results in Physics: Mundher H.A. Yaseen, Haider J. AbdDocument7 pagesResults in Physics: Mundher H.A. Yaseen, Haider J. Abdbabylon telecomNo ratings yet
- Adaptive Control of Robot Manipulators Using The Voltage Control StrategyDocument6 pagesAdaptive Control of Robot Manipulators Using The Voltage Control StrategyMartino Ojwok AjangnayNo ratings yet
- Root Locus Approach in Design of PID Controller FoDocument7 pagesRoot Locus Approach in Design of PID Controller FoSneha KumariNo ratings yet
- Sensitivity Analysis of Serial and Parallel Manipulator - A ReviewDocument6 pagesSensitivity Analysis of Serial and Parallel Manipulator - A ReviewTJPRC PublicationsNo ratings yet
- Gujarat Technological University: W.E.F. AY 2018-19Document3 pagesGujarat Technological University: W.E.F. AY 2018-19Bhavesh Patel100% (1)
- Applmech 02 00009Document12 pagesApplmech 02 00009SubhasreeNo ratings yet
- Vardhaman College of Engineering, Hyderabad: Iii B.Tech I Semester Course StructureDocument2 pagesVardhaman College of Engineering, Hyderabad: Iii B.Tech I Semester Course StructureHod of ME PRRMNo ratings yet
- Jurnal 002Document8 pagesJurnal 002Ilham AmirulNo ratings yet
- Design, Modeling and Hybrid Control of A QuadPlaneDocument17 pagesDesign, Modeling and Hybrid Control of A QuadPlaneGige DovNo ratings yet
- Final Veto Mac PaperDocument16 pagesFinal Veto Mac Papermartinsb76No ratings yet
- Expert: Rotating MachineryDocument13 pagesExpert: Rotating MachineryJolito RamosNo ratings yet
- Amrul Faruq ROV 2013Document13 pagesAmrul Faruq ROV 2013Amrul FaruqNo ratings yet
- Mathematical Modeling and Simulation of Quadcopter-UAV Using PID ControllerDocument8 pagesMathematical Modeling and Simulation of Quadcopter-UAV Using PID Controllerأبو هشامNo ratings yet
- Auto-Balancing Two Wheeled Inverted Pendulum RobotDocument6 pagesAuto-Balancing Two Wheeled Inverted Pendulum Robotsaran gowdaNo ratings yet
- Bond Graph Paper A K SamantaryDocument31 pagesBond Graph Paper A K Samantaryrajmeet singhNo ratings yet
- FOC Design of PMSM by Multi-Objective OptimizationDocument7 pagesFOC Design of PMSM by Multi-Objective OptimizationHùng MạnhNo ratings yet
- applsci-12-07003-v3Document12 pagesapplsci-12-07003-v3avv81419No ratings yet
- Online Estimation of Vehicle InertialDocument6 pagesOnline Estimation of Vehicle InertialMF IqbalNo ratings yet
- KMDocument120 pagesKMsankara25101991No ratings yet
- Sensor-Less Field Oriented Control of Wind TurbineDocument11 pagesSensor-Less Field Oriented Control of Wind TurbinegiovanniNo ratings yet
- Design of Fuzzy Logic Based Controller For Gyroscopic Inverted PendulumDocument8 pagesDesign of Fuzzy Logic Based Controller For Gyroscopic Inverted Pendulumban bekasNo ratings yet
- Simultaneous Identification of Residual Unbalances and Bearing Dynamic Parameters From Impulse Responses of Rotor-Bearing SystemsDocument25 pagesSimultaneous Identification of Residual Unbalances and Bearing Dynamic Parameters From Impulse Responses of Rotor-Bearing SystemsSiva Srinivas RangavajhalaNo ratings yet
- Simulated Annealing Based Optimal Proportional Integral DerivativDocument70 pagesSimulated Annealing Based Optimal Proportional Integral DerivativMahmoud AbuzayedNo ratings yet
- Optimized Robust Cruise Control System for an Electric VehicleDocument9 pagesOptimized Robust Cruise Control System for an Electric VehicleMuhammad Aseer KhanNo ratings yet
- Two-wheeled inverted pendulum robot friction compensationDocument10 pagesTwo-wheeled inverted pendulum robot friction compensationJason ArensNo ratings yet
- Robust Real-Time Control of A Two-Rotor Aerodynamic SystemDocument6 pagesRobust Real-Time Control of A Two-Rotor Aerodynamic SystemsaeedNo ratings yet
- Dynamics Modelling and Linear Control of QuadcopterDocument6 pagesDynamics Modelling and Linear Control of QuadcopterBrilian Putra AmiruddinNo ratings yet
- Vibration Analysis Including Stator Rotor Hou 2018 Journal of Electrical SDocument14 pagesVibration Analysis Including Stator Rotor Hou 2018 Journal of Electrical SSathish KumarNo ratings yet
- 1.4 Mechanisms (Inversions)Document30 pages1.4 Mechanisms (Inversions)Ajith KumarNo ratings yet
- Semi-Active Suspension System With M.R. Damper For Car Seat Vibratio N-A ReviewDocument4 pagesSemi-Active Suspension System With M.R. Damper For Car Seat Vibratio N-A ReviewPankaj SharmaNo ratings yet
- Course OutlineDocument3 pagesCourse OutlineHaile SimachewNo ratings yet
- Hexacopter ControlDocument9 pagesHexacopter Control陳昱文No ratings yet
- Sensor Fusion For Attitude Estimation and PID Control of Quadrotor UAVDocument8 pagesSensor Fusion For Attitude Estimation and PID Control of Quadrotor UAVSemih AteşNo ratings yet
- Điều khiển theo dõi tốc độ của động cơ đồng bộ nam châm vĩnh cửu với bộ quan sát trạng thái và mô-men xoắn tảiDocument10 pagesĐiều khiển theo dõi tốc độ của động cơ đồng bộ nam châm vĩnh cửu với bộ quan sát trạng thái và mô-men xoắn tảiNguyễn Văn HoàNo ratings yet
- IMECE1999 ChenDocument8 pagesIMECE1999 Chen1296amiirNo ratings yet
- Bearings ShaftsDocument74 pagesBearings ShaftsCik MinnNo ratings yet
- Choice of Steel Material To Avoid Brittle Fracture For Hollow Section StructuresDocument204 pagesChoice of Steel Material To Avoid Brittle Fracture For Hollow Section Structuresg1n2No ratings yet
- Journal of Environmental Sciences research on morphology changes of coking coal during cokingDocument4 pagesJournal of Environmental Sciences research on morphology changes of coking coal during cokingJohan Pranata BarusNo ratings yet
- Chapter - 3.2 - Finale Internal Forced ConvectionDocument18 pagesChapter - 3.2 - Finale Internal Forced ConvectioneirinaNo ratings yet
- What Happens When Warm Air RisesDocument30 pagesWhat Happens When Warm Air RisesCriselAlamag100% (1)
- How To Mathematics Organize Patterns in The World?Document3 pagesHow To Mathematics Organize Patterns in The World?johnmartin sabiliNo ratings yet
- Motion Programming For ComauDocument318 pagesMotion Programming For ComauEddie Scarpa100% (1)
- Heat Transfer Chapter 1 IntroductionDocument68 pagesHeat Transfer Chapter 1 IntroductionsubratorajNo ratings yet
- Unit 6 WS3Document2 pagesUnit 6 WS3Kaitlyn TranNo ratings yet
- Diagnostic Fracture Injection Tests in Ultra Low Perm FormationsDocument6 pagesDiagnostic Fracture Injection Tests in Ultra Low Perm FormationsBolsec14No ratings yet
- Thesis MainDocument144 pagesThesis MainIvan GrkajacNo ratings yet
- Comparing Effective Surface Areas of Random PackingsDocument10 pagesComparing Effective Surface Areas of Random PackingsAntonio MezzopreteNo ratings yet
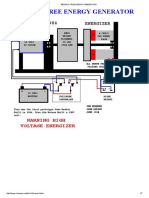
- Bedini's Free Energy Generator PDFDocument7 pagesBedini's Free Energy Generator PDFRafly Attila Al-Fiqri71% (7)
- Slide Micro Teaching 5.3Document18 pagesSlide Micro Teaching 5.3Mastura MohamadNo ratings yet
- Chemical Purification Methods ListDocument8 pagesChemical Purification Methods ListMd.Mehdi MasudNo ratings yet
- Chemical Process Instrumentation: Pressure Measurement: Moderate and High Pressure Measuring InstrumentsDocument10 pagesChemical Process Instrumentation: Pressure Measurement: Moderate and High Pressure Measuring InstrumentslvrevathiNo ratings yet
- GannZilla User GuideDocument20 pagesGannZilla User GuideNiladri Jana100% (26)
- Curtain Wall System From Technal - Geode-BrochureDocument38 pagesCurtain Wall System From Technal - Geode-BrochurebatteekhNo ratings yet
- BEYOND SYLLABUS: CURVED, COMPOSITE, UNSYMMETRICAL BEAMSDocument11 pagesBEYOND SYLLABUS: CURVED, COMPOSITE, UNSYMMETRICAL BEAMSVignesh VickyNo ratings yet
- 960 Physics (PPU) Semester 2 Topics-SyllabusDocument7 pages960 Physics (PPU) Semester 2 Topics-SyllabusJosh, LRT0% (1)
- Information Folder LUCCON PDFDocument9 pagesInformation Folder LUCCON PDFASHOKKUMAR ENo ratings yet
- Refractive Index of A Liquid (Theory) : Class 12: PhysicsDocument4 pagesRefractive Index of A Liquid (Theory) : Class 12: PhysicsAmartya AnshumanNo ratings yet
- Testing of Rigid Plastic ContainersDocument22 pagesTesting of Rigid Plastic ContainersBhupendra Singh100% (12)
- Fluent 6.0 Staff Training Combustion and DPMDocument30 pagesFluent 6.0 Staff Training Combustion and DPMZakManNo ratings yet
- The Planets Comparative Superlative - 87358Document2 pagesThe Planets Comparative Superlative - 87358Maria AdamNo ratings yet
- Atlas TechNotes - Complete Set Rev Nov 2011Document50 pagesAtlas TechNotes - Complete Set Rev Nov 2011caod1712No ratings yet
- Ch15 Differential Momentum BalanceDocument20 pagesCh15 Differential Momentum Balance89kkNo ratings yet
- Tutorial Chapter 1 2018Document3 pagesTutorial Chapter 1 2018Ain Syahira0% (1)
- PFlow ScriptDocument6 pagesPFlow Scripttohu777No ratings yet
- IOE, TU Questions and Solutions: Engineering Physics (for BE first yearDocument235 pagesIOE, TU Questions and Solutions: Engineering Physics (for BE first yearRajeev PaudelNo ratings yet