You might also like
- 2020 IEEE 17th International Symposium On Biomedical Imaging (ISBI) April 3-7, 2020, Iowa City, Iowa, USADocument5 pages2020 IEEE 17th International Symposium On Biomedical Imaging (ISBI) April 3-7, 2020, Iowa City, Iowa, USABENAZIR BEGAM RNo ratings yet
- Automatic Extraction and Sign Determination of Respiratory Signal in Real-Time Cardiac Magnetic Resonance Imaging Chong Chen, Yingmin Liu, Orlando P. Simonetti, Rizwan Ahmad The Ohio State UniversityDocument4 pagesAutomatic Extraction and Sign Determination of Respiratory Signal in Real-Time Cardiac Magnetic Resonance Imaging Chong Chen, Yingmin Liu, Orlando P. Simonetti, Rizwan Ahmad The Ohio State UniversityBENAZIR BEGAM RNo ratings yet
- A New Alzheimer's Disease Classification Technique From Brain MRI ImagesDocument6 pagesA New Alzheimer's Disease Classification Technique From Brain MRI ImagesBENAZIR BEGAM RNo ratings yet
- 2020 IEEE 17th International Symposium On Biomedical Imaging (ISBI) April 3-7, 2020, Iowa City, Iowa, USADocument4 pages2020 IEEE 17th International Symposium On Biomedical Imaging (ISBI) April 3-7, 2020, Iowa City, Iowa, USABENAZIR BEGAM RNo ratings yet
- Non-Invasive Brain Tumor Detection Using Magnetic Resonance Imaging Based Fractal Texture Features and Shape MeasuresDocument5 pagesNon-Invasive Brain Tumor Detection Using Magnetic Resonance Imaging Based Fractal Texture Features and Shape MeasuresBENAZIR BEGAM RNo ratings yet
- SS PPT-08.07.2020Document32 pagesSS PPT-08.07.2020BENAZIR BEGAM RNo ratings yet
- Check if a signal is periodic or notDocument9 pagesCheck if a signal is periodic or notBENAZIR BEGAM RNo ratings yet
- Signals and Systems (EC19303)Document16 pagesSignals and Systems (EC19303)BENAZIR BEGAM RNo ratings yet
- Lab Oriented Theory CourseDocument2 pagesLab Oriented Theory CourseBENAZIR BEGAM RNo ratings yet
- Ec19303-Signals and Systems: Unit 1-Important Formula Name Continuous DiscreteDocument3 pagesEc19303-Signals and Systems: Unit 1-Important Formula Name Continuous DiscreteBENAZIR BEGAM RNo ratings yet
- Ec19303-Signals and SytemsDocument15 pagesEc19303-Signals and SytemsBENAZIR BEGAM RNo ratings yet
- SS PPT-08.07.2020Document32 pagesSS PPT-08.07.2020BENAZIR BEGAM RNo ratings yet
- Unit 5Document22 pagesUnit 5BENAZIR BEGAM RNo ratings yet
- Signals and Systems (EC19303)Document15 pagesSignals and Systems (EC19303)BENAZIR BEGAM RNo ratings yet
- Digital Image ProcessingDocument76 pagesDigital Image Processingngocbienk56No ratings yet
- Image ProcessingDocument8 pagesImage ProcessingBENAZIR BEGAM RNo ratings yet
- Neighborhood Operations in ImagesDocument27 pagesNeighborhood Operations in ImagesBENAZIR BEGAM RNo ratings yet
- Digital CommunicationDocument334 pagesDigital CommunicationsanthoshNo ratings yet
- Unit 5 - Finite Element Method (Chapter 1 of 2)Document13 pagesUnit 5 - Finite Element Method (Chapter 1 of 2)BENAZIR BEGAM RNo ratings yet
- Electromagnetics Field Theory 69 Important MCQDocument12 pagesElectromagnetics Field Theory 69 Important MCQANIL SinghNo ratings yet
- Signals and Systems by Nagoor KaniDocument5 pagesSignals and Systems by Nagoor KaniBENAZIR BEGAM RNo ratings yet
- Introduction to JPEG and MPEG Compression StandardsDocument68 pagesIntroduction to JPEG and MPEG Compression StandardsruikarsachinNo ratings yet
- Signals Controls Scaling and Shifting SuperDocument19 pagesSignals Controls Scaling and Shifting SuperPraveen Kumar KilaparthiNo ratings yet
- Image Processing-IntroductionDocument35 pagesImage Processing-IntroductionBENAZIR BEGAM RNo ratings yet
- Unit 5 1mDocument3 pagesUnit 5 1mBENAZIR BEGAM RNo ratings yet
- Non-Teaching PostDocument4 pagesNon-Teaching PostBENAZIR BEGAM RNo ratings yet
- 2 m&16 MDocument11 pages2 m&16 MBENAZIR BEGAM RNo ratings yet
- Virtual Instrumentation Based Breast Cancer Detection and Classification Using Image-ProcessingDocument4 pagesVirtual Instrumentation Based Breast Cancer Detection and Classification Using Image-ProcessingBENAZIR BEGAM RNo ratings yet
- Poynting's Theorem: Energy ConservationDocument8 pagesPoynting's Theorem: Energy ConservationBENAZIR BEGAM RNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- 9709 w15 Ms 42Document7 pages9709 w15 Ms 42yuke kristinaNo ratings yet
- Form 4 - Physics ExercisesDocument9 pagesForm 4 - Physics Exercisesnik mohamad solehin100% (3)
- Computer-Process Interface For Data Acquisition and ControlDocument8 pagesComputer-Process Interface For Data Acquisition and ControlVidisha JhaNo ratings yet
- AS Practice Paper F (Statistics & Mechanics) mark scheme breakdownDocument9 pagesAS Practice Paper F (Statistics & Mechanics) mark scheme breakdownKasundi FernandoNo ratings yet
- Math Zc234 l8Document22 pagesMath Zc234 l8Sadhanandan NambittiyathNo ratings yet
- 5.prog To Perform Bit Manipulation To Check If Bit Is Odd or Even and Positive or NegativeDocument11 pages5.prog To Perform Bit Manipulation To Check If Bit Is Odd or Even and Positive or NegativeGlen Flav PaisNo ratings yet
- 4403 - Tugas 2 - Matematika Rekayasa IDocument2 pages4403 - Tugas 2 - Matematika Rekayasa IKharisma NugrahaNo ratings yet
- Practice ProblemsDocument4 pagesPractice ProblemsPalash dasNo ratings yet
- Factoring Perfect Square TrinomialsDocument2 pagesFactoring Perfect Square TrinomialsOrpelita RomeroNo ratings yet
- FS@Document9 pagesFS@Nidhie ✫ SinghNo ratings yet
- Point and Figure Charts: Why You Should Be Using ThemDocument81 pagesPoint and Figure Charts: Why You Should Be Using ThemSwati Tandon100% (3)
- Construct Validity and Reliability of Olweus BullyDocument8 pagesConstruct Validity and Reliability of Olweus BullyNabila Pasha AmeliaNo ratings yet
- Introduction To The Statistical Drake EquationDocument55 pagesIntroduction To The Statistical Drake EquationMystery WireNo ratings yet
- Data Structures NotesDocument97 pagesData Structures NotesKibru AberaNo ratings yet
- FIRST PERIODIC TEST IN GRADE 7 MATHEMATICSDocument6 pagesFIRST PERIODIC TEST IN GRADE 7 MATHEMATICSAguila AlvinNo ratings yet
- A1AG12ADocument3 pagesA1AG12AAnonymous RzU94z100% (1)
- Lecture21 Canonical TransformationDocument25 pagesLecture21 Canonical TransformationKelvin LNo ratings yet
- DemonstrationDocument10 pagesDemonstrationAbhiraj Singh ShekhawatNo ratings yet
- Quantitative Methods For Business 12Th Edition Anderson Solutions Manual Full Chapter PDFDocument65 pagesQuantitative Methods For Business 12Th Edition Anderson Solutions Manual Full Chapter PDFvernier.decyliclnn4100% (8)
- Pulse Code Modulation (Sampling, Quantizing, Encoding)Document21 pagesPulse Code Modulation (Sampling, Quantizing, Encoding)Jayan Kulathoor100% (1)
- Oscillations MCQDocument8 pagesOscillations MCQShalini KulshresthaNo ratings yet
- Gibbs Free EnergyDocument19 pagesGibbs Free EnergyGregNo ratings yet
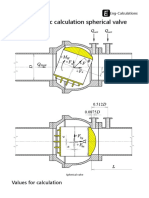
- Hydrodynamic Calculation Spherical ValveDocument34 pagesHydrodynamic Calculation Spherical ValveEng-CalculationsNo ratings yet
- Lecture 14: Principal Component Analysis: Computing The Principal ComponentsDocument6 pagesLecture 14: Principal Component Analysis: Computing The Principal ComponentsShebinNo ratings yet
- Introducing Decision Transformers On Hugging Face ?Document12 pagesIntroducing Decision Transformers On Hugging Face ?minfuelNo ratings yet
- The Politics of Mathematics Education in The US: Dominant and Counter Agendas Eric GutsteinDocument45 pagesThe Politics of Mathematics Education in The US: Dominant and Counter Agendas Eric Gutsteindavisfc50No ratings yet
- Chapter 7 Moment Distribution MethodDocument12 pagesChapter 7 Moment Distribution MethodSatyen Ramani100% (1)
- Amc 8 2019Document10 pagesAmc 8 2019Madhu Mohan ChandranNo ratings yet
- Contact Session 2Document35 pagesContact Session 2api-3724082No ratings yet
- Distinct Features of Leadership vs ManagementDocument8 pagesDistinct Features of Leadership vs Managementmukesh.33100% (2)