You might also like
- Numerical Method Full MatlabDocument25 pagesNumerical Method Full MatlabSamip PandeyNo ratings yet
- With One Mixed Fraction4Document2 pagesWith One Mixed Fraction4Nguyen DuyNo ratings yet
- Aptes 033Document7 pagesAptes 033bcp12No ratings yet
- Rush - AnimateDocument4 pagesRush - AnimateSantos FigueroaNo ratings yet
- Voincing Gm6 (Em7b5)Document1 pageVoincing Gm6 (Em7b5)Matteo RuggieroNo ratings yet
- Agglomative Clustering CasestudyDocument15 pagesAgglomative Clustering Casestudyクマー ヴィーンNo ratings yet
- With One Mixed Fraction2Document2 pagesWith One Mixed Fraction2Nguyen DuyNo ratings yet
- Aizzatul Ismiyah Penelitian Operasi 2 ETSDocument9 pagesAizzatul Ismiyah Penelitian Operasi 2 ETSAndika WardanaNo ratings yet
- With One Mixed Fraction1Document2 pagesWith One Mixed Fraction1Nguyen DuyNo ratings yet
- Multiplying and Dividing ExponentsDocument5 pagesMultiplying and Dividing Exponentsjameslaula3No ratings yet
- Gauss-Jordan Elimination & The Number of SolutionsDocument4 pagesGauss-Jordan Elimination & The Number of SolutionsMuhamad Zahwan AnwarNo ratings yet
- Missing Operator Math Workbook, Level 1Document102 pagesMissing Operator Math Workbook, Level 1Tinh LeNo ratings yet
- CagedDocument4 pagesCagedcoNo ratings yet
- Blue Tarp Blues: PerformanceDocument3 pagesBlue Tarp Blues: PerformancebecmusicNo ratings yet
- Joe Satriani BookDocument8 pagesJoe Satriani BookOlivier BlondelNo ratings yet
- 3aquine Mccluskeymethod 191016140548Document33 pages3aquine Mccluskeymethod 191016140548Anonymous eWMnRr70qNo ratings yet
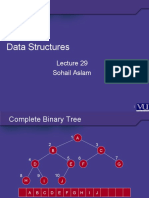
- Data Structures: Sohail AslamDocument20 pagesData Structures: Sohail AslamM NOOR MALIKNo ratings yet
- IntroductionDocument14 pagesIntroductionSyamimi AqilaNo ratings yet
- Mineure Harmonique Gammes Et ArpègesDocument6 pagesMineure Harmonique Gammes Et ArpègesmachoiNo ratings yet
- Autumn Leaves SunghaDocument17 pagesAutumn Leaves SunghaFranco SeminarioNo ratings yet
- Drop 2 Guitar Chords, p1Document2 pagesDrop 2 Guitar Chords, p1Jacob HansenNo ratings yet
- Heap Data Structure - Interview CakeDocument15 pagesHeap Data Structure - Interview CakeRonaldMartinezNo ratings yet
- Melodic Comping How To Get StartedDocument2 pagesMelodic Comping How To Get StartedpedosNo ratings yet
- Melodic Comping How To Get Started PDFDocument2 pagesMelodic Comping How To Get Started PDFshredforeverNo ratings yet
- Matematika - PenugranganDocument2 pagesMatematika - PenugranganHOS EDUCATIONNo ratings yet
- I Parte:: Multiplicación de FraccionesDocument7 pagesI Parte:: Multiplicación de FraccionesAnonymous q4ZgeoeNo ratings yet
- Aquellos Ojos Verdes IntroDocument1 pageAquellos Ojos Verdes IntroTom KesslerNo ratings yet
- Frank Gambale Little CharmerDocument17 pagesFrank Gambale Little CharmerFabio BittencourtNo ratings yet
- Función GammaDocument1 pageFunción GammaAndres MartinezNo ratings yet
- BSA 3036 - HW Chapter 6Document12 pagesBSA 3036 - HW Chapter 6Hoài Linh NguyễnNo ratings yet
- Midpoint Formula PracticeDocument4 pagesMidpoint Formula PracticeJiho JunNo ratings yet
- Resuelve Los Siguientes Productos de Fracciones: I Parte: 1) 6) 11)Document6 pagesResuelve Los Siguientes Productos de Fracciones: I Parte: 1) 6) 11)Joaquin TroncosoNo ratings yet
- Resuelve Los Siguientes Productos de Fracciones: I Parte: 1) 6) 11)Document6 pagesResuelve Los Siguientes Productos de Fracciones: I Parte: 1) 6) 11)Joaquin TroncosoNo ratings yet
- INTELIGENCIA ARTIFICIAL-4ta SESIONDocument4 pagesINTELIGENCIA ARTIFICIAL-4ta SESIONDaniel MuñozNo ratings yet
- Portfolio Management Part 2Document6 pagesPortfolio Management Part 2mahisacNo ratings yet
- Exercise 1 Multiply These Fractions. Cancel and Simplify If Possible. 1. 2. 3Document4 pagesExercise 1 Multiply These Fractions. Cancel and Simplify If Possible. 1. 2. 3damanNo ratings yet
- Basic Rock Rhythm 2 Richards Insp PerformanceDocument2 pagesBasic Rock Rhythm 2 Richards Insp PerformanceDawid Roman CedroNo ratings yet
- TeacherDocument5 pagesTeacherMassimoNo ratings yet
- Lecture32 K-Means Clustering ExerciseDocument2 pagesLecture32 K-Means Clustering ExercisePavan KumarNo ratings yet
- Lecture32 K-Means Clustering ExerciseDocument2 pagesLecture32 K-Means Clustering ExercisePavan KumarNo ratings yet
- Lesson 5 Worksheet MixedDocument3 pagesLesson 5 Worksheet MixedAyman HalimeNo ratings yet
- 1 2五六弦的單弦音階 PDFDocument1 page1 2五六弦的單弦音階 PDFFelix WuNo ratings yet
- Missing Operator Math Workbook, Level 2Document102 pagesMissing Operator Math Workbook, Level 2Tinh LeNo ratings yet
- Orca Share Media1579045586649Document5 pagesOrca Share Media1579045586649Teresa Marie Yap CorderoNo ratings yet
- Good Day: Sungha JungDocument16 pagesGood Day: Sungha JungHân ClinomaniaNo ratings yet
- Quine-McCluskey MethodDocument36 pagesQuine-McCluskey MethodMARUPAKA BHARGAV ANAND BU21CSEN0400111No ratings yet
- 2 - Remarkably HumanDocument18 pages2 - Remarkably HumanLuis Ferrer100% (2)
- PERTDocument7 pagesPERTPrajaktaNo ratings yet
- Planet X - Ataraxia: MoonbabiesDocument15 pagesPlanet X - Ataraxia: Moonbabieszaraki9No ratings yet
- Quine-Mccluskey MethodDocument34 pagesQuine-Mccluskey MethodR WanNo ratings yet
- BC 170400916Document4 pagesBC 170400916aqsa ranaNo ratings yet
- Math 9 - Mini Performance TaskDocument2 pagesMath 9 - Mini Performance TaskTenZeroNo ratings yet
- Math Problem SearchDocument2 pagesMath Problem SearchLuisina Nunez SanchezNo ratings yet
- Transport and Assignment AnswerDocument22 pagesTransport and Assignment AnswerRishi Kesan DNo ratings yet
- WorksheetWorks Fraction Subtraction 5Document2 pagesWorksheetWorks Fraction Subtraction 5fatin shemyNo ratings yet
- Supriyahw3 12040810Document8 pagesSupriyahw3 12040810SUPRIYA MADDELANo ratings yet
- Beginning of The Year Review #1-12Document1 pageBeginning of The Year Review #1-12Walter MoseNo ratings yet
- Applets: Kuldeep Yogi Banasthali UnuversityDocument29 pagesApplets: Kuldeep Yogi Banasthali UnuversityArchana PanwarNo ratings yet
- Pert CPMDocument41 pagesPert CPMArchana PanwarNo ratings yet
- Amazon Web Service CASE STUDYDocument36 pagesAmazon Web Service CASE STUDYrichaNo ratings yet
- Frame Relay and ATMDocument36 pagesFrame Relay and ATMArchana PanwarNo ratings yet
- Pumping Lemma For Regular LanguageDocument38 pagesPumping Lemma For Regular LanguageArchana PanwarNo ratings yet
- 2 DeadlocksDocument45 pages2 DeadlocksArchana PanwarNo ratings yet
- Java Applets: Kuldeep YogiDocument14 pagesJava Applets: Kuldeep YogiArchana PanwarNo ratings yet
- Project Read MeDocument7 pagesProject Read MeArchana PanwarNo ratings yet
- EmbeddedDocument14 pagesEmbeddedArchana PanwarNo ratings yet
- Multiplex & DemultiplexDocument56 pagesMultiplex & DemultiplexSriNi VaSanNo ratings yet
- SQA MetricsDocument46 pagesSQA MetricsArchana PanwarNo ratings yet
- 3 Main MemoryDocument46 pages3 Main MemoryArchana PanwarNo ratings yet
- Basic Blocks and Flow Graphs PDFDocument7 pagesBasic Blocks and Flow Graphs PDFArchana PanwarNo ratings yet
- Cryptography Hash FunctionsDocument5 pagesCryptography Hash FunctionsArchana PanwarNo ratings yet
- 7 - rs2-cbDocument24 pages7 - rs2-cbahmetcakiroglu90No ratings yet
- Caching in Distributed File System: Ke Wang CS614 - Advanced System Apr 24, 2001Document56 pagesCaching in Distributed File System: Ke Wang CS614 - Advanced System Apr 24, 2001Archana PanwarNo ratings yet
- Predicate Calculus: Conversion To Normal FormDocument25 pagesPredicate Calculus: Conversion To Normal FormArchana PanwarNo ratings yet
- Predicate Calculus: Resolution in FOLDocument25 pagesPredicate Calculus: Resolution in FOLArchana PanwarNo ratings yet
- 8 - Problem Reduction SearchDocument31 pages8 - Problem Reduction SearchArchana PanwarNo ratings yet
- 2 DeadlocksDocument45 pages2 DeadlocksArchana PanwarNo ratings yet
- 4 Virtual MemoryDocument31 pages4 Virtual MemoryArchana PanwarNo ratings yet
- 1 Process SynchronizationDocument35 pages1 Process SynchronizationArchana PanwarNo ratings yet
- 19 - FramesDocument21 pages19 - FramesArchana PanwarNo ratings yet
- Artificial Intelligence: Mca V Sem/ MSC Iii SemDocument18 pagesArtificial Intelligence: Mca V Sem/ MSC Iii SemDiksha DwivediNo ratings yet
- Online Registration Synopsis RMPDocument29 pagesOnline Registration Synopsis RMPAnkit Saxena100% (1)
- 2013 PhamDocument82 pages2013 PhamWaseem TajNo ratings yet
- 10 - Game Playing StrategiesDocument71 pages10 - Game Playing StrategiesArchana PanwarNo ratings yet
- 11 - Knowledge RepresentationDocument17 pages11 - Knowledge RepresentationArchana PanwarNo ratings yet
- Synopsis "Zee Bank Atm System" Submitted by Archana Panwar: For The Award of The Degree ofDocument30 pagesSynopsis "Zee Bank Atm System" Submitted by Archana Panwar: For The Award of The Degree ofArchana PanwarNo ratings yet
- Analysis of AlgorithmDocument43 pagesAnalysis of AlgorithmAzeemNo ratings yet
- ListsDocument118 pagesListswircexdjNo ratings yet
- Lab 2 Dsa (Idham Izzudin)Document18 pagesLab 2 Dsa (Idham Izzudin)Zhen WeiNo ratings yet
- Discrete Mathematics: Chapter 10.4-10.5Document17 pagesDiscrete Mathematics: Chapter 10.4-10.5Nguyen Dinh Minh (K15 HL)No ratings yet
- Genetic Algorithm 2Document41 pagesGenetic Algorithm 2LekshmiNo ratings yet
- Aiml-Dsa BCSL305 ManualDocument54 pagesAiml-Dsa BCSL305 ManualAdarsh KumarNo ratings yet
- Chapter Three: Lecture 1: Solving Problems by Searching and Constraint Satisfaction ProblemDocument53 pagesChapter Three: Lecture 1: Solving Problems by Searching and Constraint Satisfaction Problemashenafi endaleNo ratings yet
- Chapter7 ArraysDocument26 pagesChapter7 Arrayshisham_eyesNo ratings yet
- Ensemble Learning: HARIS JAMIL (FA18-RCS-003) HOOIRA ANAM (FA18-RCS-004)Document14 pagesEnsemble Learning: HARIS JAMIL (FA18-RCS-003) HOOIRA ANAM (FA18-RCS-004)suppiNo ratings yet
- Java Notes: 11.1 Learning OutcomesDocument13 pagesJava Notes: 11.1 Learning OutcomesSrinivas MalliboinaNo ratings yet
- DS Assignment 01Document6 pagesDS Assignment 01Qura tul AinNo ratings yet
- Write A C++ Program To Implement All The Functions of A Dictionary (ADT) Using HashingDocument4 pagesWrite A C++ Program To Implement All The Functions of A Dictionary (ADT) Using HashingShebin SheikhNo ratings yet
- 10 Multi-Threading Interview Questions Top 20 Core Java Interview Questions AnswersDocument14 pages10 Multi-Threading Interview Questions Top 20 Core Java Interview Questions AnswersArun KumarNo ratings yet
- Lab Program 3Document6 pagesLab Program 3Keshav DhawanNo ratings yet
- CSE 5311 Homework 1 Solution: Problem 2.2-1Document8 pagesCSE 5311 Homework 1 Solution: Problem 2.2-1tilahun0% (1)
- Skip Lists: A Probabilistic Alternative To Balanced TreesDocument9 pagesSkip Lists: A Probabilistic Alternative To Balanced TreeshendersonNo ratings yet
- LAB1Document12 pagesLAB1ngokhoa26102004No ratings yet
- Data Structures and Algorithms in Python: Michael T. GoodrichDocument4 pagesData Structures and Algorithms in Python: Michael T. GoodrichvinodkthakurNo ratings yet
- RBR Videos List Complete PDFDocument222 pagesRBR Videos List Complete PDFKaustubh67% (3)
- Hashing: Why We Need Hashing?Document22 pagesHashing: Why We Need Hashing?sri aknthNo ratings yet
- Term 1 FinalDocument5 pagesTerm 1 Finalanupam_ashishNo ratings yet
- Tree TraversalsDocument17 pagesTree TraversalsRajendranbehappyNo ratings yet
- Chapter 3Document16 pagesChapter 3busatiNo ratings yet
- Parallel and Distributed Query Processing: Practice ExercisesDocument4 pagesParallel and Distributed Query Processing: Practice ExercisesDivyanshu BoseNo ratings yet
- Arya Group of Colleges Ii Mid Term Examination 2020-21 (V Sem.) 5Cs3-01: Information Theory and Coding (Branch: Cse)Document1 pageArya Group of Colleges Ii Mid Term Examination 2020-21 (V Sem.) 5Cs3-01: Information Theory and Coding (Branch: Cse)Niraj Kumar LatharNo ratings yet
- Table of LFSRDocument6 pagesTable of LFSRMayur AnvekarNo ratings yet
- 20 - 1 - ML - Unsup - 01 - Partition Based - KmeansDocument20 pages20 - 1 - ML - Unsup - 01 - Partition Based - KmeansMohitKhemkaNo ratings yet
- POM Assignment 4 GIM123Document11 pagesPOM Assignment 4 GIM123shivaniNo ratings yet
- Cpe111 Ultimate Mother SauceDocument48 pagesCpe111 Ultimate Mother SauceBlank BlankNo ratings yet
- Assessment - 6: Question 1: Write The C Program To Implement A Linked List File Allocation MethodDocument6 pagesAssessment - 6: Question 1: Write The C Program To Implement A Linked List File Allocation MethodVinayak MahadevanNo ratings yet