You might also like
- 9.3-4: Phase Plane PortraitsDocument9 pages9.3-4: Phase Plane PortraitsAnonymous XgZHEFQdNo ratings yet
- 2 - Defects & RemediesDocument29 pages2 - Defects & RemediesShivam Aggarwal100% (2)
- Chap 2Document58 pagesChap 2Breezy Buzy OnNo ratings yet
- Chap 2 Nonlinear Finite Element Analysis Procedures: Nam-Ho KimDocument55 pagesChap 2 Nonlinear Finite Element Analysis Procedures: Nam-Ho KimVijay Kumar PolimeruNo ratings yet
- Chap 2 Nonlinear Finite Element Analysis Procedures: Nam-Ho KimDocument55 pagesChap 2 Nonlinear Finite Element Analysis Procedures: Nam-Ho KimSarah CrawfordNo ratings yet
- MEF en Mécanique Non Linéaire Chapitre 1: Non-Linéarité en MécaniqueDocument48 pagesMEF en Mécanique Non Linéaire Chapitre 1: Non-Linéarité en MécaniqueChiheb BaNo ratings yet
- MEF en Mécanique Non Linéaire: Khalil - Mansouri@enit - Utm.tnDocument36 pagesMEF en Mécanique Non Linéaire: Khalil - Mansouri@enit - Utm.tnChiheb BaNo ratings yet
- 12 FemDocument84 pages12 FemLohit BattuNo ratings yet
- Chapter 1c - Mech ProperDocument63 pagesChapter 1c - Mech PropermaiNo ratings yet
- 8 FieldsDocument17 pages8 FieldsSuvankar DasNo ratings yet
- Sbe10 10 Simple RegressionDocument100 pagesSbe10 10 Simple RegressionRAMANo ratings yet
- Lecture 3 FEAShapeFunctions1DDocument24 pagesLecture 3 FEAShapeFunctions1DatilolaNo ratings yet
- Stability of Nonlinear SystemsDocument34 pagesStability of Nonlinear SystemsAmgad_A_Salama_239No ratings yet
- Bending Stress PDFDocument26 pagesBending Stress PDFRio ChanNo ratings yet
- Vibrations of Continuous SystemsDocument27 pagesVibrations of Continuous SystemslalbaghNo ratings yet
- Singular Value DecompositionDocument24 pagesSingular Value DecompositionDevansh DwivediNo ratings yet
- Linear Regression PartADocument34 pagesLinear Regression PartAAkshay kashyapNo ratings yet
- Chap 3 FEA For Nonlinear Elastic Problems: Nam-Ho KimDocument137 pagesChap 3 FEA For Nonlinear Elastic Problems: Nam-Ho KimBruno RibeiroNo ratings yet
- Euler Bernoulli EquationDocument16 pagesEuler Bernoulli EquationBoon FuiNo ratings yet
- Fundamentals of Engineering Review For Dynamics: Dr.'s Yannitell (Retired) & DR Waggenspack Mewagg@me - Lsu.eduDocument43 pagesFundamentals of Engineering Review For Dynamics: Dr.'s Yannitell (Retired) & DR Waggenspack Mewagg@me - Lsu.eduLalo RubioNo ratings yet
- Simple Linear RegressionDocument43 pagesSimple Linear RegressionLiona PatriciaNo ratings yet
- Chap 3Document137 pagesChap 3Breezy Buzy OnNo ratings yet
- Classification by EigenvaluesDocument6 pagesClassification by EigenvaluessandorNo ratings yet
- Deleted Tpoics in MathDocument1 pageDeleted Tpoics in MathGaurav Kumar YadavNo ratings yet
- Lec4 Numerical ModelDocument26 pagesLec4 Numerical ModelNoorLiana MahmudNo ratings yet
- Deflection of BeamsDocument29 pagesDeflection of Beamsyarendogan360No ratings yet
- RegressionDocument3 pagesRegressionrohitpatil222No ratings yet
- Curve FittingDocument48 pagesCurve FittingNi Putu Indira MelilaNo ratings yet
- Development of Beam EquationsDocument61 pagesDevelopment of Beam Equations4091 Varun SharmaNo ratings yet
- Dynamic Analysis Using FeaDocument114 pagesDynamic Analysis Using FeaDr P Ravinder ReddyNo ratings yet
- Differential Equations: Also Known As Engineering Analysis or EngianaDocument66 pagesDifferential Equations: Also Known As Engineering Analysis or EngianaPatrice Pauline TamoriaNo ratings yet
- Femppt 130313204553 Phpapp01Document38 pagesFemppt 130313204553 Phpapp01srinivasNo ratings yet
- Lec21 EdgeDetectionDocument45 pagesLec21 EdgeDetectionAbburi KumarNo ratings yet
- Trigonometric Fourier Series: - OutlineDocument23 pagesTrigonometric Fourier Series: - OutlineBoy KerenzNo ratings yet
- Regression: Building Experimental ModelsDocument47 pagesRegression: Building Experimental ModelsOnur KirpiciNo ratings yet
- Simple RegressionDocument27 pagesSimple Regressionalemu ayeneNo ratings yet
- 1-Stress and Deflection PresentationDocument25 pages1-Stress and Deflection PresentationJulien ChanNo ratings yet
- Singular Value DecompositionDocument24 pagesSingular Value DecompositionGurleen KaurNo ratings yet
- Chap 4 Finite Element Analysis of Beams and FramesDocument45 pagesChap 4 Finite Element Analysis of Beams and FramesBejil ShresthaNo ratings yet
- Lecture 1-IntroductionDocument7 pagesLecture 1-Introductionelkhouly882No ratings yet
- Least Squares: ORE 766 Numerical Methods in Ocean Engineering Instructor: Eva Marie NosalDocument24 pagesLeast Squares: ORE 766 Numerical Methods in Ocean Engineering Instructor: Eva Marie NosalDenis Constantin Ilie-AblachimNo ratings yet
- Beam and FramesDocument70 pagesBeam and Framesbhetuwalamrit17No ratings yet
- Topic 3BDocument75 pagesTopic 3BMuhammad Hamza Bin TahirNo ratings yet
- 18 Kinematics PDFDocument8 pages18 Kinematics PDFWR ciptoNo ratings yet
- Sessions 18 19 - Regression - SLR MLRDocument70 pagesSessions 18 19 - Regression - SLR MLRjeevanboda.738No ratings yet
- Laplace Transform and Its Application: Prepare By: Mayur PrajapatiDocument24 pagesLaplace Transform and Its Application: Prepare By: Mayur Prajapatifares noureddineNo ratings yet
- ME2 Class Test 1 Sample & Solns0Document6 pagesME2 Class Test 1 Sample & Solns0kakaNo ratings yet
- Stability and Instability of Solitons in Inhomogeneous MediaDocument95 pagesStability and Instability of Solitons in Inhomogeneous MediaAgus Dwi PriyantoNo ratings yet
- Lecture 4Document107 pagesLecture 4Kedir ShiferawNo ratings yet
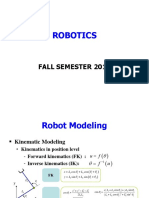
- Robotics: Fall Semester 2019Document23 pagesRobotics: Fall Semester 2019Saad Ikram CheemaNo ratings yet
- chp7 PDFDocument21 pageschp7 PDFDaniel 01No ratings yet
- Menter RANSDocument57 pagesMenter RANSMohamed OudaNo ratings yet
- LSDYNA Basic NotesDocument83 pagesLSDYNA Basic NotesJayDeep Khajure100% (1)
- Correlation & RegressionDocument24 pagesCorrelation & RegressionAnsh TalwarNo ratings yet
- 2017 Level II SS 3 Quantitative Methods (Lecture)Document10 pages2017 Level II SS 3 Quantitative Methods (Lecture)haoyuting426No ratings yet
- Vision8featureextraction 28harris Sift 29Document42 pagesVision8featureextraction 28harris Sift 29Muhammad Ikmal Bin MudaNo ratings yet
- Laplace Transform and Its Application: Prepare By: Mayur PrajapatiDocument24 pagesLaplace Transform and Its Application: Prepare By: Mayur PrajapatiNirmal PanchalNo ratings yet
- Laplace TransformDocument7 pagesLaplace TransformTpk TpkNo ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- Quantitative Phase Composition Analysis of Liquid Phase Sintered Silicon Carbide Using The Rietveld MethodDocument5 pagesQuantitative Phase Composition Analysis of Liquid Phase Sintered Silicon Carbide Using The Rietveld MethodalkimiaNo ratings yet
- DuctingDocument16 pagesDuctingAnil P. SinghNo ratings yet
- SOLVENT - BASED - Inks Brochure PDFDocument33 pagesSOLVENT - BASED - Inks Brochure PDFUmashankarNo ratings yet
- Session 1 - Application Aspect - Rock Cavern Development in Hong Kong - Ir Leslie TSANGDocument106 pagesSession 1 - Application Aspect - Rock Cavern Development in Hong Kong - Ir Leslie TSANGHinLapYuNo ratings yet
- Smooth-Tread Standard Tire For Special-Purpose Pavement Frictional-Property TestsDocument2 pagesSmooth-Tread Standard Tire For Special-Purpose Pavement Frictional-Property TestsFRANZ RICHARD SARDINAS MALLCONo ratings yet
- Working Drawing Assignment 1Document8 pagesWorking Drawing Assignment 1YING TZY LEWNo ratings yet
- Tivar 88-2: Drop-In Liners Solve Flow ProblemsDocument1 pageTivar 88-2: Drop-In Liners Solve Flow Problemsacas35100% (1)
- Kentexpress - Co.uk-Edge Endo FilesDocument12 pagesKentexpress - Co.uk-Edge Endo FilesskribdNo ratings yet
- Sist en 12390 3 2019Document10 pagesSist en 12390 3 2019Francois UWIMBABAZINo ratings yet
- PG 146-168Document23 pagesPG 146-168filkeNo ratings yet
- 12 - AlroColorCodes-11042021Document15 pages12 - AlroColorCodes-11042021Karol DíazNo ratings yet
- Exact 8201Document2 pagesExact 8201Kashif MuhammadNo ratings yet
- Lecture 2. Modern Methods of ConstructionDocument76 pagesLecture 2. Modern Methods of ConstructionSurya Pratap Singh SlathiaNo ratings yet
- Effect of Infills On Torsion and Soft Storey in A Conventional Residential Building in Tehran-IranDocument9 pagesEffect of Infills On Torsion and Soft Storey in A Conventional Residential Building in Tehran-IranMadhav PurohitNo ratings yet
- CoatingTech March 2014Document76 pagesCoatingTech March 2014Giovanni OsorioNo ratings yet
- Chemistry MCQs SHEIRDocument10 pagesChemistry MCQs SHEIRIrfan AliNo ratings yet
- Review On Alkali-Activated Fly Ash Based Geopolymer ConcreteDocument9 pagesReview On Alkali-Activated Fly Ash Based Geopolymer ConcreteFlick TornNo ratings yet
- Bending and Shear Stresses in BeamsDocument28 pagesBending and Shear Stresses in BeamsJusteen Barrientos Maningo100% (1)
- Differential Scanning Calorimetry (DSC)Document9 pagesDifferential Scanning Calorimetry (DSC)DanielNo ratings yet
- Msds Uq160 enDocument5 pagesMsds Uq160 enAnnalisa GiammòNo ratings yet
- CFD SimulationDocument65 pagesCFD Simulationsa heNo ratings yet
- Milosan R47Document8 pagesMilosan R47Barot JaynamNo ratings yet
- Synthesis of New Schiff Base From Natural Products For Remediation of Water Pollution With Heavy Metals in Industrial AreasDocument10 pagesSynthesis of New Schiff Base From Natural Products For Remediation of Water Pollution With Heavy Metals in Industrial AreasChern YuanNo ratings yet
- Pcog Lab Ex 1,2,3Document8 pagesPcog Lab Ex 1,2,3Cyril Leigh Santos EstrellasNo ratings yet
- Desirable Properties of Refrigerants.Document6 pagesDesirable Properties of Refrigerants.Amit PrajapatiNo ratings yet
- Modeling Useful Creep LifeDocument15 pagesModeling Useful Creep LifeFame Boy Sam100% (1)
- AP DigitalKit LightingDocument192 pagesAP DigitalKit LightingAshutosh BaberwalNo ratings yet
- Material Spec 1.4571Document2 pagesMaterial Spec 1.4571Vishal GoelNo ratings yet
- Class 12 ChemistryDocument8 pagesClass 12 Chemistrysharanakash06No ratings yet