You might also like
- Appliance Control by RT-LINUXDocument21 pagesAppliance Control by RT-LINUXManikanta RobbiNo ratings yet
- Lab01 PDFDocument5 pagesLab01 PDFNitinNo ratings yet
- Mirko Holler March 2000: Installation & ExamplesDocument10 pagesMirko Holler March 2000: Installation & ExamplesGautamNo ratings yet
- Network Monitoring and ManagementDocument16 pagesNetwork Monitoring and Managementརྟ་མགྲིན་ དབང་ཕྱུག།No ratings yet
- Systemcalls Userprogram 4.0Document22 pagesSystemcalls Userprogram 4.0LeThuy NgaNo ratings yet
- Linux Some CommandsDocument79 pagesLinux Some CommandsShaik NaseeruddinNo ratings yet
- Realtime Applications With RTAI: R.KOCIK - Embedded Systems DepartmentDocument69 pagesRealtime Applications With RTAI: R.KOCIK - Embedded Systems DepartmentsatyanaryanakNo ratings yet
- Simulator Testing On CentOS SetupDocument5 pagesSimulator Testing On CentOS SetupSantosh Aditya Sharma ManthaNo ratings yet
- Laboratory 4-2 IP Routing - RIPDocument10 pagesLaboratory 4-2 IP Routing - RIPAldrin MarianoNo ratings yet
- C++ Io Hardware Programming For PC SpeakersDocument20 pagesC++ Io Hardware Programming For PC Speakersmartinlutherilemore2019100% (1)
- HomeDocument65 pagesHomecrsarinNo ratings yet
- Embedded Systems Engineering: R.A. Prabhath BuddhikaDocument36 pagesEmbedded Systems Engineering: R.A. Prabhath BuddhikaAbilashini jayakodyNo ratings yet
- ECE 315 Computer Interfacing Lab #2: Serial Interfacing Using The Zynq-7000 UART InterfaceDocument9 pagesECE 315 Computer Interfacing Lab #2: Serial Interfacing Using The Zynq-7000 UART InterfaceShawn ShadeNo ratings yet
- Network ToolsDocument8 pagesNetwork ToolsIas Aspirant AbhiNo ratings yet
- System Calls: Vangelis Ladakis Ladakis@Document19 pagesSystem Calls: Vangelis Ladakis Ladakis@david seaNo ratings yet
- Firewall Lab SessionDocument31 pagesFirewall Lab SessionRohan KatariaNo ratings yet
- CISCO PACKET TRACER LABS: Best practice of configuring or troubleshooting NetworkFrom EverandCISCO PACKET TRACER LABS: Best practice of configuring or troubleshooting NetworkNo ratings yet
- Serial Port rs232Document35 pagesSerial Port rs232dokeosNo ratings yet
- 0S Labs Inclass Guide - HK221Document18 pages0S Labs Inclass Guide - HK221khai.trinhdinhNo ratings yet
- AixDocument19 pagesAixDani ElmiNo ratings yet
- Character Device DriverDocument42 pagesCharacter Device DriverNaga ManjunathNo ratings yet
- RH342 - Default - 20190726 BookDocument11 pagesRH342 - Default - 20190726 BookAnonymous NeRBrZyAUbNo ratings yet
- PseudocodeDocument8 pagesPseudocodeLuqman HakimNo ratings yet
- 8.processes, IpcDocument78 pages8.processes, Ipcyogeshwari bahiramNo ratings yet
- EmbeddedSys Nri Unit-VIIDocument36 pagesEmbeddedSys Nri Unit-VIIMurali KrishnaNo ratings yet
- A Precise Delay Method in Cortex-M KernelDocument11 pagesA Precise Delay Method in Cortex-M KernelzhangjifanNo ratings yet
- LCD RS232 InterfaceDocument2,505 pagesLCD RS232 InterfaceJuan Gil RocaNo ratings yet
- Common Tools and Methods Used in Vulnhub CTF'sDocument4 pagesCommon Tools and Methods Used in Vulnhub CTF'spipiiiiiiiNo ratings yet
- Stepper MotorDocument12 pagesStepper MotorAnonymous QIuAGIadXmNo ratings yet
- Modern Computer Architecture (Processor Design) : Prof. Dan Connors Dconnors@colostate - EduDocument32 pagesModern Computer Architecture (Processor Design) : Prof. Dan Connors Dconnors@colostate - EduDeepak JangidNo ratings yet
- AixusefulcommandsDocument20 pagesAixusefulcommandsparsontanNo ratings yet
- Topic 9 AVR Programming in C (ISMAIL - FKEUTM 2018)Document94 pagesTopic 9 AVR Programming in C (ISMAIL - FKEUTM 2018)Aya AmirNo ratings yet
- Unix CommandsDocument7 pagesUnix CommandsKondalarao SuravarapuNo ratings yet
- Assignment 2Document4 pagesAssignment 2DhruvNo ratings yet
- 15 - Low Layer Library - Init Functions - 2pagesDocument15 pages15 - Low Layer Library - Init Functions - 2pagesjean-christophe ToussaintNo ratings yet
- Elce2016 Debug RT PDFDocument80 pagesElce2016 Debug RT PDFaaaaNo ratings yet
- Generic Siemens828d 3X MillDocument39 pagesGeneric Siemens828d 3X MillSiva kumarNo ratings yet
- Lab FreeRTOSDocument11 pagesLab FreeRTOSImmortal WizardNo ratings yet
- OS4k Linux Commands PDFDocument17 pagesOS4k Linux Commands PDFKC KCNo ratings yet
- Debugging RubyDocument86 pagesDebugging RubyAman Gupta88% (8)
- Final PracticalsDocument29 pagesFinal PracticalssiddNo ratings yet
- 5 System Startup and ShutdownDocument17 pages5 System Startup and ShutdownDevender RajuNo ratings yet
- Contemporary Device Tree PDFDocument25 pagesContemporary Device Tree PDFgiribabu reddyNo ratings yet
- Unix Toolbox: 1 SystemDocument48 pagesUnix Toolbox: 1 Systemarevshar4779No ratings yet
- Raw Socket TutorialDocument12 pagesRaw Socket Tutorialvel.sakthi3152No ratings yet
- Sensors and Sensing Lab 1: Arduino Motor Control and ROSDocument7 pagesSensors and Sensing Lab 1: Arduino Motor Control and ROSFebri Rizky PratamaNo ratings yet
- Keil C51 Cross Compiler: Embedded Systems 2 2 - 1 C ProgrammingDocument35 pagesKeil C51 Cross Compiler: Embedded Systems 2 2 - 1 C ProgrammingPrapulla KumarNo ratings yet
- Lab1 SpecDocument6 pagesLab1 Spec星期三的配音是對的No ratings yet
- Linux Interview QuestionsDocument51 pagesLinux Interview Questionsseenu933No ratings yet
- Microblaze Linux: Using An FPGA-based Processor Is: Very Intelligent Very Stupid Don't KnowDocument53 pagesMicroblaze Linux: Using An FPGA-based Processor Is: Very Intelligent Very Stupid Don't Knowgaurav311086No ratings yet
- ARM Operating ModesDocument152 pagesARM Operating Modesrammohan2b0% (1)
- TD Contiki PDFDocument10 pagesTD Contiki PDFyvesNo ratings yet
- Computer Programmings & AlgorithmsDocument32 pagesComputer Programmings & AlgorithmsAdons ChuitraNo ratings yet
- Hack Win XP With MSFDocument10 pagesHack Win XP With MSFpunzango73No ratings yet
- Programming The PSoC With 8051 Assembly InstructionsDocument6 pagesProgramming The PSoC With 8051 Assembly InstructionsAdwitiyaNo ratings yet
- Ns2 Streaming Implementations Tutorial VCarrascalDocument11 pagesNs2 Streaming Implementations Tutorial VCarrascalnoormohd99No ratings yet
- 10 GB Ethernet Mark Wagner: Senior Software Engineer, Red HatDocument58 pages10 GB Ethernet Mark Wagner: Senior Software Engineer, Red HatDmitriy IlchenkoNo ratings yet
- PLC: Programmable Logic Controller – Arktika.: EXPERIMENTAL PRODUCT BASED ON CPLD.From EverandPLC: Programmable Logic Controller – Arktika.: EXPERIMENTAL PRODUCT BASED ON CPLD.No ratings yet
- C Programming for the Pc the Mac and the Arduino Microcontroller SystemFrom EverandC Programming for the Pc the Mac and the Arduino Microcontroller SystemNo ratings yet
- Opera HotelDocument49 pagesOpera HotelCurry FishHead100% (1)
- Colloquial English Structure and Variation by Andrew RadfordDocument346 pagesColloquial English Structure and Variation by Andrew RadfordLuciana Diciero100% (1)
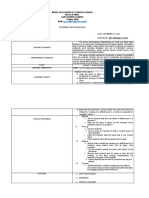
- Bohol Association of Catholic Schools Diocese of Talibon Saint Joseph Academy Candijay, Bohol EmailDocument3 pagesBohol Association of Catholic Schools Diocese of Talibon Saint Joseph Academy Candijay, Bohol Emailmira rochenieNo ratings yet
- Prose, The Lottery, Ida B. Wells-BarnettDocument28 pagesProse, The Lottery, Ida B. Wells-BarnettGeraldine L. GaddiNo ratings yet
- Africa by David Diop With MessageDocument4 pagesAfrica by David Diop With MessageNeil Patrick Jallorina67% (3)
- "To Daffodils" by Robert HerrickDocument8 pages"To Daffodils" by Robert Herrickحسين عبداللهNo ratings yet
- S.O.L.I.D. Software Development, One Step at A TimeDocument36 pagesS.O.L.I.D. Software Development, One Step at A TimejunkyardNo ratings yet
- Spectation Communication Manual enDocument110 pagesSpectation Communication Manual enLázaroNo ratings yet
- Notes On PLC and Industrial NetworksDocument13 pagesNotes On PLC and Industrial NetworksjoshuaNo ratings yet
- Process SynchronizationDocument19 pagesProcess Synchronizationnanekaraditya06No ratings yet
- Comp - Sem VI - Artificial Intelligence+Sample QuestionsDocument7 pagesComp - Sem VI - Artificial Intelligence+Sample Questionschirag mataiNo ratings yet
- Ip Practical FileDocument20 pagesIp Practical Fileayanspartan3536No ratings yet
- Our House Madness ExercisesDocument5 pagesOur House Madness ExercisesmonastriNo ratings yet
- Likes and Dislikes, Preferences...Document3 pagesLikes and Dislikes, Preferences...Piroska SzolnokiNo ratings yet
- Java NotesDocument27 pagesJava Notesdeepti8No ratings yet
- Gitlab Seismic Shift in Application Security WhitepaperDocument16 pagesGitlab Seismic Shift in Application Security Whitepaperkakayow457No ratings yet
- Chapter 222 LabviewDocument65 pagesChapter 222 LabviewRahul Virmani100% (1)
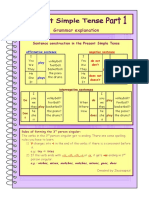
- Present Simple Tense Part 1 Grammar ExplanationDocument2 pagesPresent Simple Tense Part 1 Grammar Explanationdonaldo100% (1)
- Sri Gopala Bhatta GoswamiDocument8 pagesSri Gopala Bhatta GoswamispshankarjpsNo ratings yet
- Assessment 2 DiscriptionDocument18 pagesAssessment 2 Discriptionapi-354576162No ratings yet
- Overview of Philippine Literature in EnglishDocument15 pagesOverview of Philippine Literature in EnglishAthea SalvadorNo ratings yet
- UntitledDocument20 pagesUntitledKilven Paul MamaliasNo ratings yet
- Chiasmus in Gen50Document4 pagesChiasmus in Gen50David SalazarNo ratings yet
- Europass CV 111223 PeterDocument2 pagesEuropass CV 111223 PeterDaniel Peter0% (1)
- Unit of Competence Operate Personal Computer: Prepared y Abenezer ADocument102 pagesUnit of Competence Operate Personal Computer: Prepared y Abenezer AhirutNo ratings yet
- Opera Buffa / The Opera Wars: - La Serva Padrona 1733Document3 pagesOpera Buffa / The Opera Wars: - La Serva Padrona 1733CandiceNo ratings yet
- War Machine, Nom de Guerre..Document2 pagesWar Machine, Nom de Guerre..JesuveNo ratings yet
- Ardent Meaning - Google Search PDFDocument1 pageArdent Meaning - Google Search PDFGurpreet SinghNo ratings yet
- Business Communication Lecture Notes Unit IDocument5 pagesBusiness Communication Lecture Notes Unit IAmit Kumar83% (6)
- The Johns Hopkins University Press Poe Studies (1971-1985)Document4 pagesThe Johns Hopkins University Press Poe Studies (1971-1985)azraNo ratings yet