You might also like
- Control Chapter 5 - RemoteDocument86 pagesControl Chapter 5 - RemoteWilmar Antonio Zuluaga ArangoNo ratings yet
- Product Bulletin Fisher 3582 3582i Positioners 582i Electro Pneumatic Converter en 124122Document12 pagesProduct Bulletin Fisher 3582 3582i Positioners 582i Electro Pneumatic Converter en 124122Sakthi Sekar CbiNo ratings yet
- d200318x012 PDFDocument12 pagesd200318x012 PDFLimuel EspirituNo ratings yet
- ET ValveDocument48 pagesET ValveDaniel SantillanNo ratings yet
- Fisher ET and EAT Easy-E Valves CL125 Through CL600 PDFDocument48 pagesFisher ET and EAT Easy-E Valves CL125 Through CL600 PDFARMANDONo ratings yet
- Density Measurement - System OverviewDocument20 pagesDensity Measurement - System OverviewLuis MayorgaNo ratings yet
- Liquid Level Switches Asme B31.1 ConstructionDocument36 pagesLiquid Level Switches Asme B31.1 Constructionsamer8saifNo ratings yet
- Hydraulic Valves AnalyticsDocument8 pagesHydraulic Valves Analyticspartha6789No ratings yet
- MincoTs103A 3Document18 pagesMincoTs103A 3Jeff AyersmanNo ratings yet
- 1 Servo Working PrincipleDocument8 pages1 Servo Working PrinciplegminayasNo ratings yet
- ms-03-19 HoseDocument8 pagesms-03-19 HoseBowo Edhi WibowoNo ratings yet
- 100 Remote View 505 PDFDocument3 pages100 Remote View 505 PDFWilliam Will Controle WoodwardNo ratings yet
- Ciu Plus & Ciu PrimeDocument8 pagesCiu Plus & Ciu Prime91665111No ratings yet
- Application Letter HSE Manager Chairunnas M.oshDocument2 pagesApplication Letter HSE Manager Chairunnas M.oshOka WansyahNo ratings yet
- Woodward Governor: Presented By: Saraswati Je/Dsl/GocDocument42 pagesWoodward Governor: Presented By: Saraswati Je/Dsl/GocTirthankar DasNo ratings yet
- Speed (%) Vs Time (Min) : Gas Turbine Starting CurveDocument2 pagesSpeed (%) Vs Time (Min) : Gas Turbine Starting CurveAdy FardyNo ratings yet
- Ceritarakyatbahasajawa 141220215106 Conversion Gate01Document10 pagesCeritarakyatbahasajawa 141220215106 Conversion Gate01istiqomahNo ratings yet
- MK6e Control System ChecksDocument4 pagesMK6e Control System ChecksAugustine Owo Ukpong100% (1)
- Displacer Type Level SwitchDocument10 pagesDisplacer Type Level SwitchKarthik Chockkalingam100% (1)
- Variable-Area FlowmeterDocument15 pagesVariable-Area FlowmeterhotnatkapoorNo ratings yet
- MkvbinDocument25 pagesMkvbinnabil160874No ratings yet
- 945 Cci 100dpc Drag Production Wellhead Choke New ConstructionDocument4 pages945 Cci 100dpc Drag Production Wellhead Choke New ConstructionAnderson SiqueiraNo ratings yet
- Masoneilan+ +124000+Spec+DataDocument20 pagesMasoneilan+ +124000+Spec+DataEphraem KalisNo ratings yet
- 02 Yokogawa Vigilant-Catalogue PDFDocument4 pages02 Yokogawa Vigilant-Catalogue PDFm33mNo ratings yet
- Masoneilan Transfer ValveDocument4 pagesMasoneilan Transfer Valveiviji81No ratings yet
- Ex2100e and Ex2100 Comparison Fact Sheet EnglishDocument1 pageEx2100e and Ex2100 Comparison Fact Sheet EnglishOrissa KonsbahalNo ratings yet
- Control Valve CharacteristicsDocument3 pagesControl Valve CharacteristicsgifitrianggraeniNo ratings yet
- Fisher 8580 Rotary Valve PDFDocument24 pagesFisher 8580 Rotary Valve PDFARMANDONo ratings yet
- Top Guide Control ValveDocument32 pagesTop Guide Control Valveachari_swapnilNo ratings yet
- Fundamentals Orifice Measurement - DanielDocument11 pagesFundamentals Orifice Measurement - DanielKuwat Riyanto0% (1)
- Magnetrol TypesDocument20 pagesMagnetrol Typesbhargav103No ratings yet
- GT - GTG - STG Cooling Air SystemDocument17 pagesGT - GTG - STG Cooling Air SystemLeelanandaNo ratings yet
- MOOG2Document1 pageMOOG2BouazzaNo ratings yet
- Frame 5001 Operation DetailsDocument1 pageFrame 5001 Operation DetailsJJNo ratings yet
- GT 6B Gas Fuel Inlet Pressure 96FG-2ABC False Indication - Automation & Control Engineering Forum PDFDocument1 pageGT 6B Gas Fuel Inlet Pressure 96FG-2ABC False Indication - Automation & Control Engineering Forum PDFnboulegrouneNo ratings yet
- 1081ch8 33Document34 pages1081ch8 33Hung NgoNo ratings yet
- Fisher ProdOvervueDocument88 pagesFisher ProdOvervueduongleanhNo ratings yet
- Gek 113306CDocument77 pagesGek 113306Cananizisikim100% (1)
- CollegepptDocument38 pagesCollegepptneethurj9No ratings yet
- Buku Pintar GTG&HRSG 1Document25 pagesBuku Pintar GTG&HRSG 1Prasetyo RaditaNo ratings yet
- Universal Relay Family: GE Consumer & IndustrialDocument22 pagesUniversal Relay Family: GE Consumer & IndustrialJulio Antonio Bastías VargasNo ratings yet
- DOD Counterfeit Parts: The ISO 55000 Asset Management System OpportunityDocument12 pagesDOD Counterfeit Parts: The ISO 55000 Asset Management System OpportunityDia Putranto HarmayNo ratings yet
- Bap - MBP SystemDocument93 pagesBap - MBP SystemGloria HamiltonNo ratings yet
- Gek 119629a PDFDocument432 pagesGek 119629a PDFasmir_aganovic8119No ratings yet
- Draft (1) RevDocument2 pagesDraft (1) RevLeelanandaNo ratings yet
- Valve CV Flow Rate FormlaeDocument1 pageValve CV Flow Rate Formlaelatasharma79No ratings yet
- OvationDocument36 pagesOvationanandtvr100% (2)
- Sec - 3 - 21k 87 88 Act 4700positDocument86 pagesSec - 3 - 21k 87 88 Act 4700positiqjoeljoachinNo ratings yet
- Control Valve SourcebookDocument218 pagesControl Valve SourcebookJuanita JitomateNo ratings yet
- Urea Paper 2c BartelliDocument7 pagesUrea Paper 2c BartelliSai PrasathNo ratings yet
- Generator TheoryDocument48 pagesGenerator TheorysulemankhalidNo ratings yet
- A Pump Performance CurveDocument6 pagesA Pump Performance CurveOcta RioNo ratings yet
- (Aglaonema2 Koleksi) : Ruby Greg Hambal 8 Dauni Ruby Greg Hambali 3 DaunDocument3 pages(Aglaonema2 Koleksi) : Ruby Greg Hambal 8 Dauni Ruby Greg Hambali 3 DaunAthwar AsharNo ratings yet
- On Mark Vi ControlDocument7 pagesOn Mark Vi Controlusman379No ratings yet
- Cross TrippingDocument2 pagesCross TrippingNimeshNo ratings yet
- Order 58 - Ball and Gate ValvesDocument20 pagesOrder 58 - Ball and Gate ValvesAngelica GonzalezNo ratings yet
- Control SystemDocument48 pagesControl SystemOlawale John AdeotiNo ratings yet
- Control System Instrumentation: Transducers and TransmittersDocument7 pagesControl System Instrumentation: Transducers and Transmitters李承家No ratings yet
- 2018 STAAR Gr5 Science TestDocument7 pages2018 STAAR Gr5 Science TestEngineerKhandaker Abid RahmanNo ratings yet
- PNEUMATICS AND AIR CIRCUITS UNDERSTANDING THE CASCADE VALVE AND PLC UNDERSTANDINGFrom EverandPNEUMATICS AND AIR CIRCUITS UNDERSTANDING THE CASCADE VALVE AND PLC UNDERSTANDINGNo ratings yet
- Mark Scheme (Results) January 2022Document16 pagesMark Scheme (Results) January 2022May Myat MANo ratings yet
- Bill Gas Thang 8Document4 pagesBill Gas Thang 8muvang16290No ratings yet
- 2010 Product CatalogDocument2 pages2010 Product CatalogwuthrichNo ratings yet
- NCE65R360D, NCE65R360, NCE65R360F DatasheetDocument10 pagesNCE65R360D, NCE65R360, NCE65R360F DatasheetMechDRNo ratings yet
- M070010 Gasmaster III Manual Iss 1Document48 pagesM070010 Gasmaster III Manual Iss 1alex_E_bondNo ratings yet
- Detecting Power Grid Synchronization Failure System On Sensing Frequency or Voltage BeyondDocument5 pagesDetecting Power Grid Synchronization Failure System On Sensing Frequency or Voltage BeyondIJRASETPublicationsNo ratings yet
- Z 3Document7 pagesZ 3MuthamizhanNo ratings yet
- SpeakershipDocument210 pagesSpeakershiptedep26200No ratings yet
- Papers 2015 11 June 2015 Premelliary Paper.Document26 pagesPapers 2015 11 June 2015 Premelliary Paper.RAVINo ratings yet
- Pursuit of 21 Century Dynamic Lighting: ©2019 All Rights Reserved. Environmental Potentials, IncDocument59 pagesPursuit of 21 Century Dynamic Lighting: ©2019 All Rights Reserved. Environmental Potentials, IncSun TzuNo ratings yet
- Maintenance of Offshore Wind TurbineDocument3 pagesMaintenance of Offshore Wind TurbineSamuel TanNo ratings yet
- Huna EnergyworkmanualDocument16 pagesHuna EnergyworkmanualLogan Gatz100% (3)
- DEPA Air Pump Service ManualDocument52 pagesDEPA Air Pump Service ManualCalNo ratings yet
- DEE - 310 - NotesDocument41 pagesDEE - 310 - NotesAlfred K ChilufyaNo ratings yet
- PHOTOVOLTAICSDocument27 pagesPHOTOVOLTAICSbrian otienoNo ratings yet
- Chemical Engineering (New) PDFDocument3 pagesChemical Engineering (New) PDFAman SrivastavaNo ratings yet
- A Combined Voltage-Endurance and Thermal Cycling Test For Stator Coils and BarsDocument8 pagesA Combined Voltage-Endurance and Thermal Cycling Test For Stator Coils and BarsdrstorytellerNo ratings yet
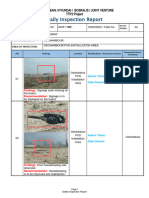
- Safety Inspection Report-18 Sept 2023 (GH)Document2 pagesSafety Inspection Report-18 Sept 2023 (GH)Wen LimNo ratings yet
- Operation Manual: Ultrasonic Bone Surgery SystemDocument25 pagesOperation Manual: Ultrasonic Bone Surgery SystemandymulyonoNo ratings yet
- Doosan - 02022015150835 - 621 - 46555713 - Operation and Maintenance ManualDocument66 pagesDoosan - 02022015150835 - 621 - 46555713 - Operation and Maintenance ManualHenry Diaz VelasquezNo ratings yet
- Chemsheets GCSE 1146 General Electrolysis 2Document1 pageChemsheets GCSE 1146 General Electrolysis 2Shehryar IftikharNo ratings yet
- Brosur Yuema Helical Bevel TKDocument143 pagesBrosur Yuema Helical Bevel TKbagus saputraNo ratings yet
- Pre Commissioning Procedures TR Rev01 Pgcil PDFDocument52 pagesPre Commissioning Procedures TR Rev01 Pgcil PDFChandraNo ratings yet
- 6WG1 TQA Workshop Manual N2223 Ex PDFDocument3 pages6WG1 TQA Workshop Manual N2223 Ex PDFmasakp75% (8)
- ASTM - STP 801 Corrosion FatigueDocument538 pagesASTM - STP 801 Corrosion FatigueKYAW SOE100% (1)
- Analyses of Hidrodynamic Radial Forces On Centrifugal PumpDocument9 pagesAnalyses of Hidrodynamic Radial Forces On Centrifugal PumpAvstron D'AgostiniNo ratings yet
- Tubular Screw Conveyor: Machine Manual En-23216.002-CDocument32 pagesTubular Screw Conveyor: Machine Manual En-23216.002-CRahmat HidayatNo ratings yet
- Schrdter 2008Document46 pagesSchrdter 2008hidayat231984No ratings yet
- Analisis de Reacto Con ChemcadDocument42 pagesAnalisis de Reacto Con ChemcadIgnacio Alvarez MendozaNo ratings yet
- DFINITI Electric Heater BrochureDocument12 pagesDFINITI Electric Heater BrochurePillai S KumarNo ratings yet