You might also like
- Lecture-2 Sensors and ActuatorsDocument39 pagesLecture-2 Sensors and ActuatorsDeepak TendolkarNo ratings yet
- Robotics Assignment-1Document7 pagesRobotics Assignment-1Mudit SharmaNo ratings yet
- Robotics IntroductionDocument22 pagesRobotics IntroductionPrashanth BnNo ratings yet
- Industrial Robotics: Anatomy, Control, Sensing and ApplicationsDocument74 pagesIndustrial Robotics: Anatomy, Control, Sensing and ApplicationsMURALIGOCAM_29070605No ratings yet
- Introduction To ROBOTICSDocument25 pagesIntroduction To ROBOTICSNyandaMadili MalashiNo ratings yet
- Introduction To RoboticsDocument54 pagesIntroduction To RoboticsEjidokun TemitayoNo ratings yet
- Presented By: B.Tech (Mechanical Engineering) Mr. K. Sunil Kumar, M.Tech Assistant ProfessorDocument22 pagesPresented By: B.Tech (Mechanical Engineering) Mr. K. Sunil Kumar, M.Tech Assistant Professorsarath chandra satuluriNo ratings yet
- Fire Fighting RobortDocument72 pagesFire Fighting RobortpandiNo ratings yet
- Bahir Dar Institute of Technology (BIT) Introduction To Robotics and AutomationDocument24 pagesBahir Dar Institute of Technology (BIT) Introduction To Robotics and AutomationBelayneh BirhanNo ratings yet
- Robot Control SystemsDocument20 pagesRobot Control Systemsellunaden.hechanova30No ratings yet
- Robotics Chapter 1Document11 pagesRobotics Chapter 1origafelixNo ratings yet
- SENSOR in RoboticsDocument20 pagesSENSOR in RoboticsAlawy FoulyNo ratings yet
- Autonomous cleaning robotDocument21 pagesAutonomous cleaning robotHorvat NorbertNo ratings yet
- RRLDocument3 pagesRRLEmmanuel RapadaNo ratings yet
- ME504 Industrial Robotics Lecture NotesDocument16 pagesME504 Industrial Robotics Lecture NotesClamant GATE AspirantNo ratings yet
- .Follower Robotic Cart Using Ultrasonic SensorDocument4 pages.Follower Robotic Cart Using Ultrasonic SensorArvin LanceNo ratings yet
- Steering Mechanism of Autonomous VehicleDocument27 pagesSteering Mechanism of Autonomous VehicleChetan SwaroopNo ratings yet
- AASTU Robotics Chapter 1: Introduction (40chDocument23 pagesAASTU Robotics Chapter 1: Introduction (40chbereketab mulugetaNo ratings yet
- Project SynopsisDocument36 pagesProject SynopsisgopalysgNo ratings yet
- Addis Ababa Science and Technology University (Aastu) Industrial Automation and Introduction To RoboticsDocument23 pagesAddis Ababa Science and Technology University (Aastu) Industrial Automation and Introduction To RoboticsrrhoshackNo ratings yet
- Elements of Mechanical EngineeringDocument76 pagesElements of Mechanical EngineeringArjun Reddy NareddyNo ratings yet
- Smart Home Technologies: Automation and RoboticsDocument57 pagesSmart Home Technologies: Automation and RoboticsShankar K. GuptaNo ratings yet
- 1) What Is The Meaning of A Control System?: Input Controller Plant OutputDocument8 pages1) What Is The Meaning of A Control System?: Input Controller Plant OutputRajath UpadhyaNo ratings yet
- Fundamentals of RobotsDocument46 pagesFundamentals of RobotsElvis OmondiNo ratings yet
- Ijret - Implementation of Pid Control To Reduce Wobbling in A Line Following RobotDocument5 pagesIjret - Implementation of Pid Control To Reduce Wobbling in A Line Following RobotInternational Journal of Research in Engineering and TechnologyNo ratings yet
- Types of Sensors in RoboticsDocument30 pagesTypes of Sensors in Roboticsky naNo ratings yet
- Gesture Controlled Robot-SynopsisDocument12 pagesGesture Controlled Robot-SynopsisRohitNo ratings yet
- Ris Module1 Bai 3603Document18 pagesRis Module1 Bai 3603ANKIT UPADHYAYNo ratings yet
- Robotics Unit-1 Important QuestionsDocument15 pagesRobotics Unit-1 Important QuestionsBEN G.YNo ratings yet
- Lect 1Document38 pagesLect 1Chilton FernandesNo ratings yet
- Unit 1: 6 HRS: Introduction: Basic Concepts, Laws of Robotics, RobotDocument69 pagesUnit 1: 6 HRS: Introduction: Basic Concepts, Laws of Robotics, Robotvithal100% (1)
- Gesture Controlled Robot-SynopsisDocument11 pagesGesture Controlled Robot-SynopsisLikepageLikeitNo ratings yet
- Robotic Sensors PDFDocument5 pagesRobotic Sensors PDFPranay ChivilkarNo ratings yet
- Actuators & Sensors For Robot: DNT352 Industrial Robotics & AutomationDocument77 pagesActuators & Sensors For Robot: DNT352 Industrial Robotics & AutomationAzim UcinNo ratings yet
- Actuators & Sensors For Robot: DNT352 Industrial Robotics & AutomationDocument77 pagesActuators & Sensors For Robot: DNT352 Industrial Robotics & AutomationAzim UcinNo ratings yet
- Performance Specifications of Industrial RobotDocument42 pagesPerformance Specifications of Industrial RobotKeshav GargNo ratings yet
- Robotics in ChemistryDocument19 pagesRobotics in ChemistryZoni MansoorNo ratings yet
- 56emerging Trends in RoboticsDocument10 pages56emerging Trends in RoboticsshibilikNo ratings yet
- Design and Development of an Autonomous Fire Fighting RobotDocument39 pagesDesign and Development of an Autonomous Fire Fighting RobotGautam GuptaNo ratings yet
- Final Suggestion 014056Document11 pagesFinal Suggestion 014056TohidulNo ratings yet
- Pavani Mini Project - 115817Document23 pagesPavani Mini Project - 115817Yelagum RahulNo ratings yet
- Autonomous Cleaning RobotDocument4 pagesAutonomous Cleaning RobotAakash SheelvantNo ratings yet
- RoboticsDocument18 pagesRoboticslakshmigsr6610100% (1)
- Fundamentals of Robot Anatomy and ClassificationDocument43 pagesFundamentals of Robot Anatomy and ClassificationAmanMauryaNo ratings yet
- Portfolio in Robotics: San Juan City Science High SchoolDocument25 pagesPortfolio in Robotics: San Juan City Science High SchoolellaNo ratings yet
- Basic Inro - RobotsDocument9 pagesBasic Inro - RobotsAwais khalidNo ratings yet
- Robots in Manufacturing: Applications and ImpactsDocument13 pagesRobots in Manufacturing: Applications and ImpactsdevashNo ratings yet
- Autonomus Mobile RobotDocument19 pagesAutonomus Mobile Robotapi-268716430% (1)
- Unit 2 Industrial Robotics: Learning ObjectivesDocument42 pagesUnit 2 Industrial Robotics: Learning ObjectivesKontham VivekNo ratings yet
- Wireless Flex Sensor Control Robot ArmDocument54 pagesWireless Flex Sensor Control Robot Armmohammed hussainNo ratings yet
- RT - Mod 1Document64 pagesRT - Mod 1Muhammed Razi MNo ratings yet
- SensorsDocument31 pagesSensorsRameshNo ratings yet
- Robotics - 2Document65 pagesRobotics - 2chandansonics06No ratings yet
- A Robotic System-Robot ComponentsDocument124 pagesA Robotic System-Robot ComponentsSidharth Suresh KumarNo ratings yet
- Mechanical Engineering Unit on Basics of RoboticsDocument68 pagesMechanical Engineering Unit on Basics of RoboticsPRADEEPNo ratings yet
- Robotics BookDocument137 pagesRobotics BookdineshkumarbaskaranNo ratings yet
- Ultra Ir 10Document4 pagesUltra Ir 10Mani RamNo ratings yet
- Materials, Parts, Tools or Specialized Devices Through Variable Programmed Motions For The Performance of A Variety of Tasks"Document38 pagesMaterials, Parts, Tools or Specialized Devices Through Variable Programmed Motions For The Performance of A Variety of Tasks"kamalahasanmNo ratings yet
- Module 1Document45 pagesModule 1yashpalsingh80726No ratings yet
- Industrial Robot AnatomyDocument68 pagesIndustrial Robot AnatomyVimal KekNo ratings yet
- 2 Hardware-A Graphical Input-OutputDocument63 pages2 Hardware-A Graphical Input-OutputEr Manpreet ChahalNo ratings yet
- Computer Aided DesignDocument29 pagesComputer Aided Designryanho99No ratings yet
- Zah4 Rac4 PDFDocument35 pagesZah4 Rac4 PDFZaheer AhamedNo ratings yet
- Csca0101 ch03Document51 pagesCsca0101 ch03Alvans Nuril BrillianNo ratings yet
- The Engineering Design Revolution - CAD History - 02 Brief OverviewDocument22 pagesThe Engineering Design Revolution - CAD History - 02 Brief OverviewphamduyprojectNo ratings yet
- Cad 3 PDFDocument4 pagesCad 3 PDFZaheer AhamedNo ratings yet
- Cad 3 PDFDocument4 pagesCad 3 PDFZaheer AhamedNo ratings yet
- Unit 4: Input and Output DevicesDocument25 pagesUnit 4: Input and Output DevicesAnwar HusainNo ratings yet
- Computer Aided DesignDocument29 pagesComputer Aided Designryanho99No ratings yet
- Unit 4 Input Output Devices: Structure Page NoDocument29 pagesUnit 4 Input Output Devices: Structure Page NoViraj KumarNo ratings yet
- Cad & CamDocument108 pagesCad & CamVeera PandianNo ratings yet
- Cad & CamDocument108 pagesCad & CamVeera PandianNo ratings yet
- 2 Hardware-A Graphical Input-OutputDocument63 pages2 Hardware-A Graphical Input-OutputEr Manpreet ChahalNo ratings yet
- Chapter 4 LCDDocument17 pagesChapter 4 LCDV.Balaji RaoNo ratings yet
- The Engineering Design Revolution - CAD History - 02 Brief OverviewDocument22 pagesThe Engineering Design Revolution - CAD History - 02 Brief OverviewphamduyprojectNo ratings yet
- Output DevicesDocument45 pagesOutput DevicesSara KhanNo ratings yet
- Proximitysensors 150125075349 Conversion Gate01Document14 pagesProximitysensors 150125075349 Conversion Gate01Zaheer AhamedNo ratings yet
- Programmable Motion Control Fundamentals Technical ReportDocument23 pagesProgrammable Motion Control Fundamentals Technical ReportZaheer AhamedNo ratings yet
- Module 1CAD Hardware and SoftwareDocument154 pagesModule 1CAD Hardware and SoftwareZaheer AhamedNo ratings yet
- A Is A Sensor Able To Detect The Presence of Nearby Objects AnyDocument59 pagesA Is A Sensor Able To Detect The Presence of Nearby Objects AnyZaheer AhamedNo ratings yet
- Transfer FunctionDocument28 pagesTransfer Functionvalerita89No ratings yet
- Displacement 20 SensorsDocument40 pagesDisplacement 20 SensorsVarshaNo ratings yet
- Article 50 Jers Volii Issue Iv Oct Dec 2011Document7 pagesArticle 50 Jers Volii Issue Iv Oct Dec 2011Zaheer AhamedNo ratings yet
- Feedback Control Systems (FCS) : Lecture-3 & 4 Transfer Function and Stability of LTI SystemsDocument30 pagesFeedback Control Systems (FCS) : Lecture-3 & 4 Transfer Function and Stability of LTI SystemsZaheer AhamedNo ratings yet
- Rapid Prototyping and Rapid Machining of Medical ImplantsDocument8 pagesRapid Prototyping and Rapid Machining of Medical ImplantsZaheer AhamedNo ratings yet
- Optical Encoder: Group MembersDocument12 pagesOptical Encoder: Group MembersZaheer AhamedNo ratings yet
- H2 RPDocument23 pagesH2 RPboermichNo ratings yet
- Rapid Prototyping & Manufacturing: ENGI 7962 Computer-Aided EngineeringDocument44 pagesRapid Prototyping & Manufacturing: ENGI 7962 Computer-Aided EngineeringZaheer AhamedNo ratings yet
- Fire Hydrants & Equipments PDFDocument16 pagesFire Hydrants & Equipments PDFSajjadNo ratings yet
- Pressure Relief Valves for Industrial ApplicationsDocument6 pagesPressure Relief Valves for Industrial ApplicationsBillouNo ratings yet
- Procedure To Install A Lubrication Group For The Circle Drive Pinion On Certain Motor GradersDocument5 pagesProcedure To Install A Lubrication Group For The Circle Drive Pinion On Certain Motor GradersLuis Augusto100% (1)
- Air Cooled Split Type Air Conditioners SpecificationsDocument2 pagesAir Cooled Split Type Air Conditioners SpecificationsWare HandokoNo ratings yet
- Fire Pump PRE-START UP CHECK LISTDocument3 pagesFire Pump PRE-START UP CHECK LISTMark Louie Guinto100% (1)
- Mil-B-8976 (Asg) : I 6 February 1969Document12 pagesMil-B-8976 (Asg) : I 6 February 1969kkpatel87No ratings yet
- Af Concrete Screw Anchor Tds 022018Document6 pagesAf Concrete Screw Anchor Tds 022018Orlando LopesNo ratings yet
- API 650 Storage Tank SpecificationsDocument21 pagesAPI 650 Storage Tank SpecificationsElias EliasNo ratings yet
- Shell Turbo Oil T32: Performance, Features & BenefitsDocument2 pagesShell Turbo Oil T32: Performance, Features & BenefitsElias GabrielNo ratings yet
- Manual de Servicio ES12-25WADocument38 pagesManual de Servicio ES12-25WARonald PiedrahitaNo ratings yet
- CalcManualGoldEng Dentadas PDFDocument72 pagesCalcManualGoldEng Dentadas PDFGabriel AraujoNo ratings yet
- Chery Automobile EGR and Purge Control System MaintenanceDocument7 pagesChery Automobile EGR and Purge Control System MaintenanceLchJmesNo ratings yet
- Dynamic Mesh OpenFoamDocument27 pagesDynamic Mesh OpenFoamM Ali0% (1)
- Bridge Engineering Drawings 10.2 - A3 - 3Document1 pageBridge Engineering Drawings 10.2 - A3 - 3Adnan NajemNo ratings yet
- Assignment 2Document2 pagesAssignment 2Jonny SinglaNo ratings yet
- Modeling Pressure Balance Expansion BellowsDocument4 pagesModeling Pressure Balance Expansion Bellowsbrunomorena50% (2)
- Ace Catalog 2009Document48 pagesAce Catalog 2009aiyubi2100% (2)
- 6D140-2Document320 pages6D140-2DanielBarrazaTapia100% (1)
- Technical Data Sheet Mpt16La 220-240V 50Hz 1 R404A: Compressor Model Voltage RefrigerantDocument4 pagesTechnical Data Sheet Mpt16La 220-240V 50Hz 1 R404A: Compressor Model Voltage RefrigerantmustafaNo ratings yet
- EXXON IP-10-01-01 Centrifugal PumpsDocument9 pagesEXXON IP-10-01-01 Centrifugal PumpsyerkoNo ratings yet
- Benkelman-Beam KCE076BCE058Document7 pagesBenkelman-Beam KCE076BCE058Prabhav DeujaNo ratings yet
- Calibration Instructions Geodyna 4300: Page 1 of 7 Date 2 October 2001Document7 pagesCalibration Instructions Geodyna 4300: Page 1 of 7 Date 2 October 2001Peter zxNo ratings yet
- UntitledDocument433 pagesUntitledDoodNo ratings yet
- Genset BasicsDocument4 pagesGenset BasicsAshish MNo ratings yet
- Assignment ME401 For GATE PreparationDocument26 pagesAssignment ME401 For GATE Preparationhameem mohdNo ratings yet
- Oxygen CylinderDocument16 pagesOxygen Cylinderamanuel walelu100% (2)
- Amendment No. 1 November 2019 TO Is 16700: 2017 Criteria For Structural Safety of Tall Concrete BuildingsDocument3 pagesAmendment No. 1 November 2019 TO Is 16700: 2017 Criteria For Structural Safety of Tall Concrete BuildingsSafora ShaikNo ratings yet
- Laboratory Report 1: Natural Frequency and Damping of Single Degree of Freedom SystemsDocument20 pagesLaboratory Report 1: Natural Frequency and Damping of Single Degree of Freedom SystemsNang TruongNo ratings yet
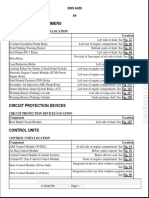
- 02 Electrical Component LocatorDocument86 pages02 Electrical Component LocatordutraneftaliNo ratings yet
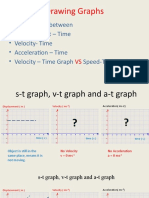
- Kinametic GraphsDocument11 pagesKinametic GraphsSec 3 EDUNo ratings yet