You might also like
- Instructions For Operation As Delivered En-1Document187 pagesInstructions For Operation As Delivered En-1OSAMA100% (1)
- En 619 - A1 - Continuous Handling Equipment and Systems - Safety and EMC Requirements For Equipment For Mechanical Handling of Unit LoadsDocument77 pagesEn 619 - A1 - Continuous Handling Equipment and Systems - Safety and EMC Requirements For Equipment For Mechanical Handling of Unit LoadsAnonymous Z5wCELpNo ratings yet
- Manual TriveniDocument245 pagesManual TriveniLuis Morales100% (1)
- Trumpf Laser Systems en PDFDocument44 pagesTrumpf Laser Systems en PDFJuanSebastiánTorresMartínez0% (1)
- Unit 2 Industrial Robotics: Learning ObjectivesDocument42 pagesUnit 2 Industrial Robotics: Learning ObjectivesKontham VivekNo ratings yet
- Ch-11b Robotics, Automation, FMSDocument71 pagesCh-11b Robotics, Automation, FMSprabhjotbhangalNo ratings yet
- Fundamentals of RobotsDocument46 pagesFundamentals of RobotsElvis OmondiNo ratings yet
- Robotics Unit 1 NotesDocument20 pagesRobotics Unit 1 NotesKirthivasanNo ratings yet
- Robotics Unit-1 Important QuestionsDocument15 pagesRobotics Unit-1 Important QuestionsBEN G.YNo ratings yet
- Robotics Chapter 1Document11 pagesRobotics Chapter 1origafelixNo ratings yet
- Industrial Robotics: Anatomy, Control, Sensing and ApplicationsDocument74 pagesIndustrial Robotics: Anatomy, Control, Sensing and ApplicationsMURALIGOCAM_29070605No ratings yet
- Steering Mechanism of Autonomous VehicleDocument27 pagesSteering Mechanism of Autonomous VehicleChetan SwaroopNo ratings yet
- Mechanical Engineering Unit on Basics of RoboticsDocument68 pagesMechanical Engineering Unit on Basics of RoboticsPRADEEPNo ratings yet
- Introduction To Industrial RobotsDocument35 pagesIntroduction To Industrial RobotsGurpreet Singh AnttalNo ratings yet
- Topic 5_ The function of robotsDocument9 pagesTopic 5_ The function of robotskvidiniotis99No ratings yet
- RoboticsDocument18 pagesRoboticslakshmigsr6610100% (1)
- Robotics Unit-1 QBDocument5 pagesRobotics Unit-1 QBveerapandianNo ratings yet
- Lecture-4 Links and Joints of RobotDocument32 pagesLecture-4 Links and Joints of RobotDeepak TendolkarNo ratings yet
- Class Robotics Unit3Document97 pagesClass Robotics Unit3Senthilkumaar JS100% (1)
- ME504 Industrial Robotics Lecture NotesDocument16 pagesME504 Industrial Robotics Lecture NotesClamant GATE AspirantNo ratings yet
- Elements of Mechanical EngineeringDocument76 pagesElements of Mechanical EngineeringArjun Reddy NareddyNo ratings yet
- Lecture 2 DR M AYAZ SHIRAZI NUST RoboticsDocument81 pagesLecture 2 DR M AYAZ SHIRAZI NUST RoboticsOwais JafriNo ratings yet
- Robotics Unit-1 NotesDocument10 pagesRobotics Unit-1 Notesmohanthakur8048No ratings yet
- Robotics (BS)Document47 pagesRobotics (BS)Anupama YadavNo ratings yet
- Prash Robotics UpdatedDocument152 pagesPrash Robotics Updatedpreethu02No ratings yet
- Robotics & Cybernetics Guide for Mechanical EngineersDocument20 pagesRobotics & Cybernetics Guide for Mechanical EngineersMichelle LucyNo ratings yet
- Chapter 1 - Background and A Classification of RobotsDocument90 pagesChapter 1 - Background and A Classification of RobotsRaziff HamsanNo ratings yet
- SPRA7004Document50 pagesSPRA7004530-M-004 AVINASH SAI GANGADANo ratings yet
- Nitin AssignmentDocument6 pagesNitin AssignmentNitin TantuwayNo ratings yet
- Robotics Lecture NoteDocument245 pagesRobotics Lecture NoteAmanuel ChalchisaNo ratings yet
- Fundamentals of Industrial Robot AnatomyDocument22 pagesFundamentals of Industrial Robot AnatomyN BHUSHANNo ratings yet
- Robotics Technology: The Wave of The Future!Document35 pagesRobotics Technology: The Wave of The Future!Mousami SoniNo ratings yet
- 2 Scsa1406 PDFDocument107 pages2 Scsa1406 PDFKIran MohanNo ratings yet
- Industrial Robotics: By:-Vishehwar Oraon MT13IND007Document25 pagesIndustrial Robotics: By:-Vishehwar Oraon MT13IND007Mathiyazhagan KaliyanNo ratings yet
- Robotics BookDocument137 pagesRobotics BookdineshkumarbaskaranNo ratings yet
- Fundamentals of Robotics: Chapter TopicsDocument19 pagesFundamentals of Robotics: Chapter TopicsGodfrey KayomboNo ratings yet
- Industrial Robotics-Unit 1Document34 pagesIndustrial Robotics-Unit 1tamilselvan nNo ratings yet
- Presentation On RobotsDocument29 pagesPresentation On Robotssharwan sharma100% (1)
- Chapter 6Document30 pagesChapter 6Jerry HalibasNo ratings yet
- 06 Industrial RoboticsDocument30 pages06 Industrial RoboticsIvan AvramovNo ratings yet
- Industrial RoboticsDocument30 pagesIndustrial RoboticsMohd Amir Abdul RahmanNo ratings yet
- Industrial RobotDocument30 pagesIndustrial Robotakmuddoy108No ratings yet
- Robotics and Vision SystemDocument64 pagesRobotics and Vision Systemasuras1234No ratings yet
- Unit 1: 6 HRS: Introduction: Basic Concepts, Laws of Robotics, RobotDocument69 pagesUnit 1: 6 HRS: Introduction: Basic Concepts, Laws of Robotics, Robotvithal100% (1)
- Unit 1Document21 pagesUnit 1kssrao13No ratings yet
- Module-1 (Tech and Anaotomy)Document16 pagesModule-1 (Tech and Anaotomy)Aditya UpadhyayNo ratings yet
- Unit 1 RoboticsDocument30 pagesUnit 1 RoboticsVishnu PriyanNo ratings yet
- Robotics-Notes From MuDocument113 pagesRobotics-Notes From MuGet OutNo ratings yet
- Vukobratovic Stokic 1989 ADocument26 pagesVukobratovic Stokic 1989 ABranko KaranNo ratings yet
- Robotics NotesDocument22 pagesRobotics NotesUpendra020% (1)
- Fundamentals of RoboticsDocument19 pagesFundamentals of RoboticsdharshanirymondNo ratings yet
- Sections: Definition of Industrial Robot Robot Anatomy End Effectors Industrial Robot Applications Robot ProgrammingDocument25 pagesSections: Definition of Industrial Robot Robot Anatomy End Effectors Industrial Robot Applications Robot Programmingsrinidhi tnNo ratings yet
- Rac Module 1Document118 pagesRac Module 1Zaheer AhamedNo ratings yet
- Introduction To ROBOTICSDocument25 pagesIntroduction To ROBOTICSNyandaMadili MalashiNo ratings yet
- Robots in Manufacturing: Applications and ImpactsDocument13 pagesRobots in Manufacturing: Applications and ImpactsdevashNo ratings yet
- Motoman Robotics - Glossary of Robotics TermsDocument15 pagesMotoman Robotics - Glossary of Robotics Termsengineer86No ratings yet
- Robotics Overview: Types, Applications, BenefitsDocument29 pagesRobotics Overview: Types, Applications, BenefitsSharmila83No ratings yet
- Robotics Session NotesDocument2 pagesRobotics Session NotesJafash S. AliNo ratings yet
- Robotics IntroductionDocument22 pagesRobotics IntroductionPrashanth BnNo ratings yet
- Revision 4th UnitDocument80 pagesRevision 4th UnitMICHEL RAJNo ratings yet
- Advanced Production and Process4Document21 pagesAdvanced Production and Process4christo royNo ratings yet
- Industrial Robotics and IotDocument20 pagesIndustrial Robotics and IotrgowdamithunpvtNo ratings yet
- Programming The Maker RobotDocument15 pagesProgramming The Maker RobotChilton FernandesNo ratings yet
- End EffectorsDocument27 pagesEnd EffectorsChilton FernandesNo ratings yet
- Chapter 1 - FundamentalsDocument31 pagesChapter 1 - FundamentalsshreedharkolekarNo ratings yet
- Robot Joint Notation Scheme ExplainedDocument2 pagesRobot Joint Notation Scheme ExplainedChilton FernandesNo ratings yet
- Lect 1Document38 pagesLect 1Chilton FernandesNo ratings yet
- Val IiDocument13 pagesVal IiChilton FernandesNo ratings yet
- Programming The Maker RobotDocument15 pagesProgramming The Maker RobotChilton FernandesNo ratings yet
- Class Test 1Document2 pagesClass Test 1Chilton FernandesNo ratings yet
- Fundamentals of RoboticsDocument19 pagesFundamentals of RoboticsdharshanirymondNo ratings yet
- TOKEN RING LAN MAC ACCESSDocument17 pagesTOKEN RING LAN MAC ACCESSChilton FernandesNo ratings yet
- Classification of RobotsDocument26 pagesClassification of RobotsChilton FernandesNo ratings yet
- TCP and UDP Communications SimulationDocument4 pagesTCP and UDP Communications SimulationChilton FernandesNo ratings yet
- Actuators Actuators: Prof. S.K. SahaDocument5 pagesActuators Actuators: Prof. S.K. SahaChilton FernandesNo ratings yet
- Train The Trainer Manual2Document17 pagesTrain The Trainer Manual2aaaNo ratings yet
- Fiber Distributed Data Interface (FDDI)Document12 pagesFiber Distributed Data Interface (FDDI)Chilton FernandesNo ratings yet
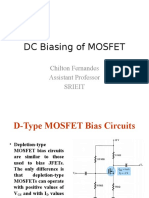
- DC Biasing of MOSFETDocument13 pagesDC Biasing of MOSFETChilton FernandesNo ratings yet
- CN QuestionsDocument1 pageCN QuestionsChilton FernandesNo ratings yet
- Robo SoccerDocument1 pageRobo SoccerChilton FernandesNo ratings yet
- Push-pull amplifiers use complementary transistors for amplified half cyclesDocument4 pagesPush-pull amplifiers use complementary transistors for amplified half cyclesChilton FernandesNo ratings yet
- IP AddressDocument5 pagesIP AddressChilton FernandesNo ratings yet
- Depletion-Type MOSFET AnalysisDocument24 pagesDepletion-Type MOSFET AnalysisChilton Fernandes100% (1)
- CN QuestionsDocument1 pageCN QuestionsChilton FernandesNo ratings yet
- Obstacle DetectionDocument1 pageObstacle DetectionChilton FernandesNo ratings yet
- Getting Started DK61 IEC61850Document38 pagesGetting Started DK61 IEC61850Chilton FernandesNo ratings yet
- IEC61850Document17 pagesIEC61850Chilton FernandesNo ratings yet
- Com Tom Gateway Introduction 2014-03-21Document18 pagesCom Tom Gateway Introduction 2014-03-21Chilton FernandesNo ratings yet
- Threshold IngDocument8 pagesThreshold IngChilton FernandesNo ratings yet
- Push-pull amplifiers use complementary transistors for amplified half cyclesDocument4 pagesPush-pull amplifiers use complementary transistors for amplified half cyclesChilton FernandesNo ratings yet
- IEC61850Document17 pagesIEC61850Chilton FernandesNo ratings yet
- Bachelor of Technology: Design and Fabrication of Multipurpose Agriculture Machine by Using BatteryDocument80 pagesBachelor of Technology: Design and Fabrication of Multipurpose Agriculture Machine by Using BatterySHAIK SAMEERNo ratings yet
- IED Tech Memo SampleDocument4 pagesIED Tech Memo SampleraharadioNo ratings yet
- AUTOMATION AND ROBOTICS IN CONSTRUCTIONDocument5 pagesAUTOMATION AND ROBOTICS IN CONSTRUCTIONAizen SousukeNo ratings yet
- B.E - 2007 RegulationsDocument14 pagesB.E - 2007 RegulationsjeyachandraneceNo ratings yet
- Guru Gobind Singh Indraprastha University: Programme: B. Tech (CSE, ECE, EE, ICE, IT, MAE, PE, EEE, ENE, CE, TE)Document4 pagesGuru Gobind Singh Indraprastha University: Programme: B. Tech (CSE, ECE, EE, ICE, IT, MAE, PE, EEE, ENE, CE, TE)tejashraj93No ratings yet
- SOP For PSG, NewDocument8 pagesSOP For PSG, Newmarkandey guptaNo ratings yet
- Mechanical Project ListDocument8 pagesMechanical Project ListSridharNo ratings yet
- Thesis PapersDocument24 pagesThesis PapersanthonyNo ratings yet
- MME 1366: Robotics Credits: 3 LTP 300Document2 pagesMME 1366: Robotics Credits: 3 LTP 300virender gurauNo ratings yet
- Low Cost Automation Report Stage 1 KVN PDFDocument39 pagesLow Cost Automation Report Stage 1 KVN PDFManoj SagarNo ratings yet
- LR Mate 200idDocument2 pagesLR Mate 200idKevin ScogginsNo ratings yet
- Mtu PDFDocument170 pagesMtu PDFjeferson de castro souza100% (1)
- Caterpillar 311b 330b Excavators Engine and Pump Electronic Control SystemDocument10 pagesCaterpillar 311b 330b Excavators Engine and Pump Electronic Control Systemjohn100% (47)
- LOTO Procedure TemplateDocument2 pagesLOTO Procedure TemplateMastur KuturNo ratings yet
- Physics SS 1 QuestionsDocument4 pagesPhysics SS 1 QuestionssunliasNo ratings yet
- U3 - 2-D4E Power Shift OperacionDocument35 pagesU3 - 2-D4E Power Shift Operacionchristian vergaray gonzales100% (1)
- 337A - Instruction - Manual - Eng - CARDA PDFDocument41 pages337A - Instruction - Manual - Eng - CARDA PDFWILLYCALSINANo ratings yet
- What Is Advanced Outfitting in ShipbuildingDocument5 pagesWhat Is Advanced Outfitting in ShipbuildingsuryaNo ratings yet
- Troubleshooting EX2600 6Document270 pagesTroubleshooting EX2600 6Khairuddin Khairuddin100% (2)
- All About Wind Lesson PlanDocument2 pagesAll About Wind Lesson Planapi-241659436No ratings yet
- 1) Different Components Related To CNC Machine ToolsDocument2 pages1) Different Components Related To CNC Machine ToolsKhabirIslamNo ratings yet
- Proportional and Servovalves Control Hydraulic Systems PreciselyDocument14 pagesProportional and Servovalves Control Hydraulic Systems PreciselyMarius IsdrailaNo ratings yet
- Me5i Emd 22564 031020Document40 pagesMe5i Emd 22564 031020shubhammarkad0694No ratings yet
- Electrical Engineering: SSC-JE 2023Document2 pagesElectrical Engineering: SSC-JE 2023Abhishek GiriNo ratings yet
- Made Easy Test SeriesDocument9 pagesMade Easy Test SeriesKapil GoyalNo ratings yet
- CTM and Utm 201609Document15 pagesCTM and Utm 201609GigiNo ratings yet