You might also like
- Chapter 1 - Background and A Classification of RobotsDocument90 pagesChapter 1 - Background and A Classification of RobotsRaziff HamsanNo ratings yet
- Robotics NotesDocument22 pagesRobotics NotesUpendra020% (1)
- Industrial Robotics Industrial Robot: Pemda40Document8 pagesIndustrial Robotics Industrial Robot: Pemda40Sivakumar VedachalamNo ratings yet
- Robotics EngineeringDocument21 pagesRobotics EngineeringMihai GînțaNo ratings yet
- Robotic ArmDocument15 pagesRobotic Armramjee26100% (2)
- Robotics Chapter 1Document11 pagesRobotics Chapter 1origafelixNo ratings yet
- Elements of Mechanical EngineeringDocument76 pagesElements of Mechanical EngineeringArjun Reddy NareddyNo ratings yet
- Nota RobotDocument26 pagesNota RobotpnroslindaNo ratings yet
- Singularities: The SCARA Acronym Stands For Selective Compliance Assembly Robot Arm or Selective ComplianceDocument5 pagesSingularities: The SCARA Acronym Stands For Selective Compliance Assembly Robot Arm or Selective ComplianceTirumalarao KandulaNo ratings yet
- Chapter 1 Fundamentals of RobotDocument43 pagesChapter 1 Fundamentals of RobotAmanMauryaNo ratings yet
- Robotics BookDocument137 pagesRobotics BookdineshkumarbaskaranNo ratings yet
- Point To Point ControlDocument19 pagesPoint To Point ControlrajeshNo ratings yet
- CH 1-OverviewDocument58 pagesCH 1-OverviewMohamed AbdullahiNo ratings yet
- Robotics Lecture NoteDocument245 pagesRobotics Lecture NoteAmanuel ChalchisaNo ratings yet
- Parts of A Robot, DOF, Classifying Robots PDFDocument71 pagesParts of A Robot, DOF, Classifying Robots PDFAswath SridharNo ratings yet
- Industrial Robotics (Unit 1 & 2)Document76 pagesIndustrial Robotics (Unit 1 & 2)b_meenakshipriya100% (2)
- Ch-11b Robotics, Automation, FMSDocument71 pagesCh-11b Robotics, Automation, FMSprabhjotbhangalNo ratings yet
- Unit 1: 6 HRS: Introduction: Basic Concepts, Laws of Robotics, RobotDocument69 pagesUnit 1: 6 HRS: Introduction: Basic Concepts, Laws of Robotics, Robotvithal100% (1)
- Lect 1Document38 pagesLect 1Chilton FernandesNo ratings yet
- Advanced Production and Process4Document21 pagesAdvanced Production and Process4christo royNo ratings yet
- Introduction To Industrial RobotsDocument35 pagesIntroduction To Industrial RobotsGurpreet Singh AnttalNo ratings yet
- Robotics (BS)Document47 pagesRobotics (BS)Anupama YadavNo ratings yet
- Lecture-3 Robot Work EnvelopsDocument34 pagesLecture-3 Robot Work EnvelopsDeepak TendolkarNo ratings yet
- Unit IV Robot Kinematics and Robot ProgrammingDocument23 pagesUnit IV Robot Kinematics and Robot Programminggnanasekar.mechNo ratings yet
- Robotics and Vision SystemDocument64 pagesRobotics and Vision Systemasuras1234No ratings yet
- RoboticsDocument37 pagesRobotics9944805552No ratings yet
- Robotics and Cybernetics For Mechanical EngineersDocument20 pagesRobotics and Cybernetics For Mechanical EngineersMichelle LucyNo ratings yet
- Robotics and Artificial Intelligence Short NotesDocument88 pagesRobotics and Artificial Intelligence Short Notesrahul22691100% (1)
- Chapter-8 RoboticsDocument22 pagesChapter-8 RoboticsschrienerNo ratings yet
- Robotics Unit-1 Important QuestionsDocument15 pagesRobotics Unit-1 Important QuestionsBEN G.YNo ratings yet
- Lecture 2 DR M AYAZ SHIRAZI NUST RoboticsDocument81 pagesLecture 2 DR M AYAZ SHIRAZI NUST RoboticsOwais JafriNo ratings yet
- IE NOTES RoboticsDocument16 pagesIE NOTES Roboticstest testNo ratings yet
- Unit1 Part2Document29 pagesUnit1 Part2Sharmila83No ratings yet
- Robot CellDocument14 pagesRobot CellAthiraNo ratings yet
- 5th ModuleDocument23 pages5th ModuleJayasmita DasNo ratings yet
- Classification of RobotsDocument26 pagesClassification of RobotsChilton FernandesNo ratings yet
- CH 8 Industrial RoboticsDocument39 pagesCH 8 Industrial RoboticsDeepak PathakNo ratings yet
- Steering Mechanism of Autonomous VehicleDocument27 pagesSteering Mechanism of Autonomous VehicleChetan SwaroopNo ratings yet
- AssignmentqDocument12 pagesAssignmentqDirajen PMNo ratings yet
- Introduction To RoboticsDocument35 pagesIntroduction To Roboticsرهف عبد اللهNo ratings yet
- Unit 1 RoboticsDocument30 pagesUnit 1 RoboticsVishnu PriyanNo ratings yet
- Module 2Document22 pagesModule 2N BHUSHANNo ratings yet
- Robotics-Notes From MuDocument113 pagesRobotics-Notes From MuGet OutNo ratings yet
- Manufacturing Technology (ME461) Lecture32Document12 pagesManufacturing Technology (ME461) Lecture32Jayant Raj SauravNo ratings yet
- Robot ProgrammingDocument40 pagesRobot Programmingvithal082No ratings yet
- Chapter 2 Introduction To Robot Manipulator PDFDocument34 pagesChapter 2 Introduction To Robot Manipulator PDFOmar AL JabaiNo ratings yet
- Ie 450 PP 8Document37 pagesIe 450 PP 8vijayasarathy2013No ratings yet
- Generic Specifications of Industrial RobotsDocument21 pagesGeneric Specifications of Industrial RobotsDeen Dayal Upadhyay Kaushal Kendra OfficeNo ratings yet
- Nitin AssignmentDocument6 pagesNitin AssignmentNitin TantuwayNo ratings yet
- Robotics Lab Manual FinalDocument39 pagesRobotics Lab Manual FinalSanthosh100% (4)
- Robotics Lectures-1 For Final Year Indir PDFDocument93 pagesRobotics Lectures-1 For Final Year Indir PDFume habibaNo ratings yet
- Chapter 1 - FundamentalsDocument28 pagesChapter 1 - FundamentalsHayleysus ShmelashNo ratings yet
- Objectives of RoboticsDocument2 pagesObjectives of RoboticsEr Alok Kumar SwainNo ratings yet
- Robot Programming - PART1Document48 pagesRobot Programming - PART1Krushnasamy SuramaniyanNo ratings yet
- 5-2-Robotics - AbkDocument43 pages5-2-Robotics - Abkfree0332hNo ratings yet
- RobotDocument17 pagesRobotpdhananjaya007No ratings yet
- Module 1Document45 pagesModule 1yashpalsingh80726No ratings yet
- Radio Control for Model Ships, Boats and AircraftFrom EverandRadio Control for Model Ships, Boats and AircraftRating: 5 out of 5 stars5/5 (1)
- Perkins Parts BookDocument54 pagesPerkins Parts BookKoppertPower83% (23)
- Supplementary Owner's Handbook Ford Transit 8/9 Seat MinibusDocument46 pagesSupplementary Owner's Handbook Ford Transit 8/9 Seat MinibusKomatsu Perkins HitachiNo ratings yet
- Autocar UK TruePDF-13 May 2020 PDFDocument84 pagesAutocar UK TruePDF-13 May 2020 PDFRemus P. PecilaNo ratings yet
- Tadano Mobile Crane Atf90g 4 Operating Service and Maintenance ManualDocument20 pagesTadano Mobile Crane Atf90g 4 Operating Service and Maintenance Manualcorey100% (40)
- Volvo V40 Owner's ManualDocument8 pagesVolvo V40 Owner's ManualFábio MagnoNo ratings yet
- Cat® Engine SpecificationsDocument5 pagesCat® Engine SpecificationsNik DelvNo ratings yet
- Vxdiag Multi Diagnostic Tool User Manual Vxdiagshop - 2018111401903117Document18 pagesVxdiag Multi Diagnostic Tool User Manual Vxdiagshop - 2018111401903117Jhon Jairo BernalNo ratings yet
- Jan-Feb ReportDocument106 pagesJan-Feb ReportMartin Slick IbeNo ratings yet
- Yaw Rate and Lateral Acceleration Sensor FunctionDocument1 pageYaw Rate and Lateral Acceleration Sensor FunctionrodeoaNo ratings yet
- Excellent Module No 2 CoompleteDocument38 pagesExcellent Module No 2 CoompleteVaibhav Vithoba NaikNo ratings yet
- Price Bridgestone FebruariDocument13 pagesPrice Bridgestone FebruariAbdurrohman Ahmad RofiqNo ratings yet
- Car Concept 1 - Study and Design LanguageDocument52 pagesCar Concept 1 - Study and Design LanguageJay SoniNo ratings yet
- 2019 Winter Model Answer Paper (Msbte Study Resources)Document21 pages2019 Winter Model Answer Paper (Msbte Study Resources)Rakshit IyengarNo ratings yet
- 785C Truck Electrical System: 1HW1-UPDocument2 pages785C Truck Electrical System: 1HW1-UPJuan MNo ratings yet
- 7 Engine Management System Components: Crankshaft Position (CKP) SensorDocument8 pages7 Engine Management System Components: Crankshaft Position (CKP) SensorMick BurnsNo ratings yet
- Jhazelles Company Profile DraftDocument22 pagesJhazelles Company Profile DraftJauhari UsmanNo ratings yet
- RWYL202 Remote Control Roller Explosive ViewDocument23 pagesRWYL202 Remote Control Roller Explosive ViewBrian EzequielNo ratings yet
- Turbocharging The Champ Flathead Six: by Greg MeyersDocument7 pagesTurbocharging The Champ Flathead Six: by Greg MeyersWilmer Howard BenderNo ratings yet
- Mack Transmissions ManualDocument521 pagesMack Transmissions ManualStephon MohanNo ratings yet
- Marketing Management (Chapter 7)Document26 pagesMarketing Management (Chapter 7)Hamidul IslamNo ratings yet
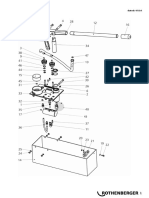
- Fluxo Filling Device A4Document4 pagesFluxo Filling Device A4YhaneNo ratings yet
- RP 50-S RP 50-S Inox en 0716Document2 pagesRP 50-S RP 50-S Inox en 0716walmadasanNo ratings yet
- RUNVA Trouble Shoot 2016Document1 pageRUNVA Trouble Shoot 2016ניקולאי איןNo ratings yet
- 9BM979277LB143354 - Linea M-110 IDocument2 pages9BM979277LB143354 - Linea M-110 Imatias cruzNo ratings yet
- 2015 Honda Fit Tech Ref Guide (EX - EXL)Document20 pages2015 Honda Fit Tech Ref Guide (EX - EXL)tharngalNo ratings yet
- აუტოDocument5 pagesაუტოphazisifNo ratings yet
- API STDS Contents Page HohoDocument2 pagesAPI STDS Contents Page HohoMuhammad HannanNo ratings yet
- Catalogo DMEDocument316 pagesCatalogo DMEArmando CaballeroNo ratings yet
- Refrigeration Compressors: A Trane Air Conditioning ClinicDocument55 pagesRefrigeration Compressors: A Trane Air Conditioning ClinicMohamad ArisNo ratings yet
- Dorcas P.PDocument10 pagesDorcas P.POrbital TechNo ratings yet