You might also like
- Introduction to Robotics Components and ClassificationsDocument28 pagesIntroduction to Robotics Components and ClassificationsDhaba AlemuNo ratings yet
- Introduction To RoboticsDocument54 pagesIntroduction To RoboticsEjidokun TemitayoNo ratings yet
- Week 1 Robotics Lecture 1Document63 pagesWeek 1 Robotics Lecture 1Charlton S.InaoNo ratings yet
- RoboticsDocument32 pagesRoboticsGacha Path:3No ratings yet
- 01 Introduction To RoboticsDocument31 pages01 Introduction To RoboticsoshadhaNo ratings yet
- What Are Some Industrial Robot Basics?Document4 pagesWhat Are Some Industrial Robot Basics?maheswaran muthuNo ratings yet
- Impact of AI on SocietyDocument24 pagesImpact of AI on SocietyHaseeb AslamNo ratings yet
- Chapter 7 - Industrial RoboticDocument43 pagesChapter 7 - Industrial Roboticardhi bebi laksonoNo ratings yet
- Inventory ManagmentDocument13 pagesInventory ManagmentSumitra SahooNo ratings yet
- Application of Industrial RobotsDocument13 pagesApplication of Industrial RobotsAvinash YewaleNo ratings yet
- Fetch / Execute CycleDocument19 pagesFetch / Execute CycleazhiNo ratings yet
- FAST (Functional Analysis System Technique)Document11 pagesFAST (Functional Analysis System Technique)abilash_nivas100% (1)
- Learning Guide-14: Plan and PrepareDocument13 pagesLearning Guide-14: Plan and PrepareTsegaye KenenisaNo ratings yet
- Inventory Control - Functions, Terms and Advantages PDFDocument9 pagesInventory Control - Functions, Terms and Advantages PDFAdnan RAHATNo ratings yet
- Contingency Framework of Management Accounting in Pakistani SMEsDocument19 pagesContingency Framework of Management Accounting in Pakistani SMEsKhoyyimahNo ratings yet
- SPM Chapter5Document63 pagesSPM Chapter5KidusNo ratings yet
- Generalities On RoboticsDocument8 pagesGeneralities On RoboticsHOMINo ratings yet
- Micro RoboticsDocument14 pagesMicro RoboticsAmina FirdoseNo ratings yet
- AI Applications Across Multiple FieldsDocument3 pagesAI Applications Across Multiple FieldsriteshNo ratings yet
- 2008-Fabrication of Metal Matrix Composites by Metal Injection Molding-A ReviewDocument13 pages2008-Fabrication of Metal Matrix Composites by Metal Injection Molding-A ReviewMostafaNo ratings yet
- Midterm ExamDocument8 pagesMidterm ExamMaster RedNo ratings yet
- 1 - Introduction and Getting StartedDocument24 pages1 - Introduction and Getting StartedBlancaflor Piores AradaNo ratings yet
- Intro To RobotDocument43 pagesIntro To RobotHarsha VardhanNo ratings yet
- Rohini 63738728871Document10 pagesRohini 63738728871Leonard MwijageNo ratings yet
- Robotics Overview: Types, Applications, BenefitsDocument29 pagesRobotics Overview: Types, Applications, BenefitsSharmila83No ratings yet
- Robotics Unit-1 QBDocument5 pagesRobotics Unit-1 QBveerapandianNo ratings yet
- Chapter One:-IntroductionDocument47 pagesChapter One:-Introductionbebilo beNo ratings yet
- Introduction to Robotics Arms FundamentalsDocument23 pagesIntroduction to Robotics Arms FundamentalsHritikNo ratings yet
- Ch-11b Robotics, Automation, FMSDocument71 pagesCh-11b Robotics, Automation, FMSprabhjotbhangalNo ratings yet
- Robotics Unit 1 NotesDocument20 pagesRobotics Unit 1 NotesKirthivasanNo ratings yet
- RoboticsDocument42 pagesRoboticsMarini Pramod KumarNo ratings yet
- Introduction To RoboticsDocument105 pagesIntroduction To RoboticsMegha Dangayach 19BPS1127No ratings yet
- What Is Robotics? The Science and Technology Behind RobotsDocument36 pagesWhat Is Robotics? The Science and Technology Behind RobotsWajdi SadiqNo ratings yet
- Robotics ManualDocument78 pagesRobotics ManualPOOJAN VANANINo ratings yet
- Unit - 1 - IntroductionDocument61 pagesUnit - 1 - IntroductionSatheesh KumarNo ratings yet
- Unit 1Document21 pagesUnit 1kssrao13No ratings yet
- Robotics Unit-1 Important QuestionsDocument15 pagesRobotics Unit-1 Important QuestionsBEN G.YNo ratings yet
- School of Mechanical Engineering DepartmentDocument75 pagesSchool of Mechanical Engineering DepartmentWilliam Jaya PrakashNo ratings yet
- Robotics (BS)Document47 pagesRobotics (BS)Anupama YadavNo ratings yet
- Unit 4: Introduction To Robot Fundamentals: MEL459: Mechatronics & RoboticsDocument70 pagesUnit 4: Introduction To Robot Fundamentals: MEL459: Mechatronics & RoboticsKashish VermaNo ratings yet
- Unit Iv Introduction To Idustrial RobotsDocument16 pagesUnit Iv Introduction To Idustrial RobotsBADINEHALSANDEEPNo ratings yet
- Automation and RoboticsDocument20 pagesAutomation and Roboticskbragkiros75No ratings yet
- Robotics c1Document24 pagesRobotics c1Md. Faysal Alam RiyadNo ratings yet
- Lecture 2 DR M AYAZ SHIRAZI NUST RoboticsDocument81 pagesLecture 2 DR M AYAZ SHIRAZI NUST RoboticsOwais JafriNo ratings yet
- Unit 2 Industrial Robotics: Learning ObjectivesDocument42 pagesUnit 2 Industrial Robotics: Learning ObjectivesKontham VivekNo ratings yet
- All UnitDocument83 pagesAll UnitShiek TiwariNo ratings yet
- Name: P.Jyothi Branch: Bio-Medical Engineering Institute: Govt. Institute of Electronics Subject: RoboticsDocument34 pagesName: P.Jyothi Branch: Bio-Medical Engineering Institute: Govt. Institute of Electronics Subject: RoboticsananthNo ratings yet
- Advanced Production and Process4Document21 pagesAdvanced Production and Process4christo royNo ratings yet
- Introduction To RoboticsDocument27 pagesIntroduction To Roboticsmech roboNo ratings yet
- Industrial Robotics: Anatomy, Control, Sensing and ApplicationsDocument74 pagesIndustrial Robotics: Anatomy, Control, Sensing and ApplicationsMURALIGOCAM_29070605No ratings yet
- Robotics BookDocument137 pagesRobotics BookdineshkumarbaskaranNo ratings yet
- Automation & Artificial Intelligence: Robots and Their ApplicationsDocument93 pagesAutomation & Artificial Intelligence: Robots and Their ApplicationsManal AndhereNo ratings yet
- DEVELOPMENT OF ROBOTIC TECHNOLOGYDocument20 pagesDEVELOPMENT OF ROBOTIC TECHNOLOGYsuresh puranic mathNo ratings yet
- Principles of RoboticsDocument81 pagesPrinciples of RoboticssvenkatprasatNo ratings yet
- ROBOTICS CLASSIFICATION AND TYPESDocument65 pagesROBOTICS CLASSIFICATION AND TYPESSiva ShankarNo ratings yet
- Robotics Interview Questions and AnswersDocument15 pagesRobotics Interview Questions and AnswersgopichandallakaNo ratings yet
- Lecture Industrial Robots - 2017 - FundamentalDocument53 pagesLecture Industrial Robots - 2017 - FundamentalĐình TrungNo ratings yet
- Fundamentals of Robotics: A Guide to Robot Anatomy, Coordinate Systems, Motions and ApplicationsDocument11 pagesFundamentals of Robotics: A Guide to Robot Anatomy, Coordinate Systems, Motions and ApplicationsVishalNo ratings yet
- 07 - Industrial RoboticsDocument78 pages07 - Industrial RoboticsBhartendu TavriNo ratings yet
- Unit1 - Basic ConceptsDocument73 pagesUnit1 - Basic ConceptsSharmila83No ratings yet
- Economic Analysis For RoboticsDocument11 pagesEconomic Analysis For RoboticsMICHEL RAJ0% (1)
- Magnetic Particle TestingDocument38 pagesMagnetic Particle Testingtbmari100% (2)
- ME8097 NDT Unit 2 Class 5Document15 pagesME8097 NDT Unit 2 Class 5MICHEL RAJNo ratings yet
- Machine VisionDocument50 pagesMachine VisionJayakrishna Kandasamy100% (1)
- Carbon Nanotubes As Reinforcement in Composites A Review of The PDFDocument17 pagesCarbon Nanotubes As Reinforcement in Composites A Review of The PDFMICHEL RAJNo ratings yet
- 1.applications of One-Dimensional ProblemsDocument78 pages1.applications of One-Dimensional ProblemsMICHEL RAJNo ratings yet
- Revision 4th UnitDocument80 pagesRevision 4th UnitMICHEL RAJNo ratings yet
- Revision 4th UnitDocument80 pagesRevision 4th UnitMICHEL RAJNo ratings yet
- OIE 751 ROBOTICS Unit 4 Class 5 (20-10-2020)Document13 pagesOIE 751 ROBOTICS Unit 4 Class 5 (20-10-2020)MICHEL RAJNo ratings yet
- Dielectrics White Paper PDFDocument6 pagesDielectrics White Paper PDFMICHEL RAJNo ratings yet
- 1.applications of One-Dimensional ProblemsDocument78 pages1.applications of One-Dimensional ProblemsMICHEL RAJNo ratings yet
- Penetrant Testing 1Document21 pagesPenetrant Testing 1Prashant PuriNo ratings yet
- Finalsss PDFDocument44 pagesFinalsss PDFMICHEL RAJNo ratings yet
- Introduction to the Six Most Common NDT MethodsDocument34 pagesIntroduction to the Six Most Common NDT MethodsNanditha Mandava ChowdaryNo ratings yet
- Aligned Graphene Oxide Nanofillers An Approach To PDFDocument7 pagesAligned Graphene Oxide Nanofillers An Approach To PDFMICHEL RAJNo ratings yet
- 2 Robot Actuators and Drive SystemsDocument42 pages2 Robot Actuators and Drive SystemsSiva RamanNo ratings yet
- Industrial Robotics PDF by Mikell P GrooverDocument2 pagesIndustrial Robotics PDF by Mikell P GrooverMICHEL RAJNo ratings yet
- Me 2028 Robotics With QBDocument133 pagesMe 2028 Robotics With QBDharmendra Kumar0% (1)
- Conductive Surface Layer On Wind Turbine Blade As PDFDocument6 pagesConductive Surface Layer On Wind Turbine Blade As PDFMICHEL RAJNo ratings yet
- Penetrant Testing 1Document21 pagesPenetrant Testing 1Prashant PuriNo ratings yet
- Penetrant Testing 1Document21 pagesPenetrant Testing 1Prashant PuriNo ratings yet
- 2 Robot Actuators and Drive SystemsDocument42 pages2 Robot Actuators and Drive SystemsSiva RamanNo ratings yet
- OIE 751 ROBOTICS Unit 2 Class 3 (03-9-2020)Document12 pagesOIE 751 ROBOTICS Unit 2 Class 3 (03-9-2020)MICHEL RAJNo ratings yet
- Chapter 4 - Robot KinematicsDocument38 pagesChapter 4 - Robot KinematicsteamehadushNo ratings yet
- Robot Drive Systems and End Effectors GuideDocument10 pagesRobot Drive Systems and End Effectors GuideMICHEL RAJ0% (1)
- Free Download Here: Industrial Robotics by Mikell P Groover PDFDocument2 pagesFree Download Here: Industrial Robotics by Mikell P Groover PDFMICHEL RAJNo ratings yet
- Unit I Fundamentals of Robot: (Revision)Document16 pagesUnit I Fundamentals of Robot: (Revision)MICHEL RAJNo ratings yet
- Oie 751 Robotics Unit 1 Q&a PDFDocument15 pagesOie 751 Robotics Unit 1 Q&a PDFMICHEL RAJ0% (1)
- OIE 751 ROBOTICS Unit 3 Class 7 (29-9-2020)Document13 pagesOIE 751 ROBOTICS Unit 3 Class 7 (29-9-2020)MICHEL RAJNo ratings yet
- 2020 - (Sankaran) - Data Analytics in Reservoir EngineeringDocument107 pages2020 - (Sankaran) - Data Analytics in Reservoir EngineeringPedro100% (1)
- Pelton WheelDocument5 pagesPelton WheelMuhammedShafiNo ratings yet
- Four Course Meal Plan and BudgetDocument5 pagesFour Course Meal Plan and BudgetPemphoNo ratings yet
- Lecture Drugs in Sport - NotesDocument14 pagesLecture Drugs in Sport - NotesDavid FornitoNo ratings yet
- Those Who Serve - Stephen Melillo (Score)Document22 pagesThose Who Serve - Stephen Melillo (Score)Fernando RamiresNo ratings yet
- Electric Tool Parts List: Air Compressor 2007 - 04 - 02 Model EC 119 (E3)Document3 pagesElectric Tool Parts List: Air Compressor 2007 - 04 - 02 Model EC 119 (E3)Ivan GallegosNo ratings yet
- Syllabus 2020Document4 pagesSyllabus 2020asdfghjklNo ratings yet
- LG Rotary Compressor GuideDocument32 pagesLG Rotary Compressor Guideวรศิษฐ์ อ๋อง33% (3)
- Swiss ReDocument9 pagesSwiss ReTuxedo1982No ratings yet
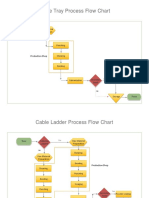
- Process Flow ChartDocument4 pagesProcess Flow Chartchacko chiramalNo ratings yet
- Electrolysis of Water: Produce H2 & O2 GasesDocument2 pagesElectrolysis of Water: Produce H2 & O2 GasesMichaelAnthonyNo ratings yet
- Psychological Theories of Crime ChartDocument1 pagePsychological Theories of Crime ChartTayyaba HafeezNo ratings yet
- Herman Pardamean Hutabarat: Mechanical EngineerDocument3 pagesHerman Pardamean Hutabarat: Mechanical EngineerHerman HutabaratNo ratings yet
- Cengel FTFS 6e ISM CH 13Document83 pagesCengel FTFS 6e ISM CH 13Duck FernandoNo ratings yet
- 2005-2010 Tacoma Bed Extender PT329-35050 Rev. A - PT329-35050Document8 pages2005-2010 Tacoma Bed Extender PT329-35050 Rev. A - PT329-35050kylemac123No ratings yet
- Final QuesDocument5 pagesFinal QuesMani KumarNo ratings yet
- VCTA-S810 OnlineDocument3 pagesVCTA-S810 OnlineqwUENo ratings yet
- Quilling Letter BDocument2 pagesQuilling Letter BGueureNo ratings yet
- Basics For BJJ SC - V3Document20 pagesBasics For BJJ SC - V3Teo Tolo100% (2)
- Industrial Coupling and HoseDocument57 pagesIndustrial Coupling and HoseCesar CoronelNo ratings yet
- LugeonDocument13 pagesLugeonRojan MaghsoodifarNo ratings yet
- 14BBG - Sec16 - NPRHD NQR NRR Diesel Cab Chassis Electrical-0215113 FinalDocument34 pages14BBG - Sec16 - NPRHD NQR NRR Diesel Cab Chassis Electrical-0215113 FinalIgmar Franco Negrete100% (2)
- Purifying Water: Study of MethodsDocument21 pagesPurifying Water: Study of MethodsRohit Thirupasur100% (2)
- Spring 2009 Midterm Opkst Mth601Document10 pagesSpring 2009 Midterm Opkst Mth601Khurram NadeemNo ratings yet
- CAS circuit analysis simulationDocument9 pagesCAS circuit analysis simulationIan MejiaNo ratings yet
- BS SMP 7-8-9 Bab B. Inggris Sec. Text (Reading) (SB - Descriptive Text)Document5 pagesBS SMP 7-8-9 Bab B. Inggris Sec. Text (Reading) (SB - Descriptive Text)TeresaAvilla Ayuning BudiCayestuNo ratings yet
- Liquid Gold Petroleum's Performance and SuccessesDocument2 pagesLiquid Gold Petroleum's Performance and SuccessesShubham DawleNo ratings yet
- Obadiah Final Manuscript 16 01Document50 pagesObadiah Final Manuscript 16 01Zenaida FeliasNo ratings yet
- Micom P44X: Numerical Distance Protection RelayDocument80 pagesMicom P44X: Numerical Distance Protection RelayKuenley TiNy OndeNo ratings yet
- A Guide to Chemical Classification of Common Volcanic RocksDocument26 pagesA Guide to Chemical Classification of Common Volcanic RocksPepeeJh VaargasNo ratings yet