You might also like
- ASVAB Core ReviewDocument208 pagesASVAB Core Reviewstanley100% (1)
- Assignment No1 of Modern Programming Tools & Techniques Iii: Submitted To Submitted BYDocument8 pagesAssignment No1 of Modern Programming Tools & Techniques Iii: Submitted To Submitted BYAnkur SinghNo ratings yet
- PDF - The Irresistible Kisser 2024 - WatermarkDocument31 pagesPDF - The Irresistible Kisser 2024 - WatermarkRazi100% (1)
- Virtual IzationDocument92 pagesVirtual IzationnkNo ratings yet
- C Programming Lab ManualDocument85 pagesC Programming Lab ManualHarly Hari KrishhNo ratings yet
- Robot Programming PDFDocument72 pagesRobot Programming PDFAswath Sridhar100% (2)
- Madeleine Leininger Transcultural NursingDocument5 pagesMadeleine Leininger Transcultural Nursingteabagman100% (1)
- Manual BeefDocument82 pagesManual Beefcmukasauk100% (1)
- Flowcode5Booklet 2 PDFDocument14 pagesFlowcode5Booklet 2 PDFgrovlhus0% (1)
- Fruits of ThailandDocument51 pagesFruits of Thailandtenzenmen100% (1)
- Flowcode5 BookletDocument14 pagesFlowcode5 BookletBeer GardenNo ratings yet
- Heritage Halls HousingDocument3 pagesHeritage Halls HousingBrevan EllefsenNo ratings yet
- FANUC Software OlpcPRODocument2 pagesFANUC Software OlpcPROJavierJBVNo ratings yet
- BSBPEF501: Manage Personal and Professional DevelopmentDocument88 pagesBSBPEF501: Manage Personal and Professional DevelopmentBruce100% (1)
- "Yfa - R : Keyboard Percussion RangesDocument2 pages"Yfa - R : Keyboard Percussion RangesmadroalNo ratings yet
- Sowmya TK Senior Software Engineer: ObjectiveDocument4 pagesSowmya TK Senior Software Engineer: Objectivesowmya tkNo ratings yet
- 6426c-Enu Trainerhandbook 2Document392 pages6426c-Enu Trainerhandbook 2mu771_No ratings yet
- McDonald's RecipeDocument18 pagesMcDonald's RecipeoxyvilleNo ratings yet
- SAP Manufacturing Implementation Architecture-1Document17 pagesSAP Manufacturing Implementation Architecture-1andriesbuterNo ratings yet
- WB TBA19 020vadvance PDFDocument266 pagesWB TBA19 020vadvance PDFTran Khang92% (12)
- Carbon Trading-The Future Money Venture For IndiaDocument11 pagesCarbon Trading-The Future Money Venture For IndiaijsretNo ratings yet
- Point of Sale - Chapter 3Document6 pagesPoint of Sale - Chapter 3Marla Angela M. JavierNo ratings yet
- RV M1Journal PDFDocument4 pagesRV M1Journal PDFolen75No ratings yet
- Robot Demo v2 Setup GuideDocument6 pagesRobot Demo v2 Setup GuideAndy YuenNo ratings yet
- Robo Mitsubishi RV m1 JournalDocument4 pagesRobo Mitsubishi RV m1 JournalTiagoGomesNo ratings yet
- Interfacing Matlab Simulink With V REP FDocument2 pagesInterfacing Matlab Simulink With V REP Fyemane g.michalNo ratings yet
- V Rep12Document28 pagesV Rep12Claudiu MinaNo ratings yet
- 2013 - CoppeliaSim IROSDocument6 pages2013 - CoppeliaSim IROSRODNEY KEVIN CHACHA PASTASNo ratings yet
- Zebra Web Printing SolutionsDocument11 pagesZebra Web Printing SolutionsWilliam MoralesNo ratings yet
- EasyPLC BrochureDocument2 pagesEasyPLC BrochureJimmy Edinson Zambrano PalaciosNo ratings yet
- Robot SimulatorsDocument29 pagesRobot SimulatorsHiệpEuclid100% (1)
- Debugging ToolsDocument10 pagesDebugging ToolsAquib KhanNo ratings yet
- Software EnvironmentDocument24 pagesSoftware Environmentmahesh gurramNo ratings yet
- EasyPLC BrochureDocument2 pagesEasyPLC BrochureArnoldoConNo ratings yet
- EasyPLC BrochureDocument2 pagesEasyPLC BrochureJose Manuel Moa PerezNo ratings yet
- FC6 Datasheet PDFDocument32 pagesFC6 Datasheet PDFPol AlemanyNo ratings yet
- Machine Vision Using LabviewDocument8 pagesMachine Vision Using LabviewLokesh DnNo ratings yet
- PLCDocument11 pagesPLCGeorge PaulNo ratings yet
- Company Profile: India's Leading IT & Technology CompanyDocument52 pagesCompany Profile: India's Leading IT & Technology CompanyAnish ChibNo ratings yet
- Sieve Paper 2columns NormalDocument8 pagesSieve Paper 2columns Normaldang-2008No ratings yet
- V Rep1Document51 pagesV Rep1ANANo ratings yet
- A Geometric Approach To Improving Active Packet Loss MeasurementDocument62 pagesA Geometric Approach To Improving Active Packet Loss MeasurementsureshramavathNo ratings yet
- Virtual User Interface For Industrial Robots Off-Line Programming & Simulation and Video Cam On-Line Remote OperationDocument6 pagesVirtual User Interface For Industrial Robots Off-Line Programming & Simulation and Video Cam On-Line Remote OperationseifNo ratings yet
- Kanhu Charan Patel: Experience SummaryDocument5 pagesKanhu Charan Patel: Experience SummaryHitesh PrajapatiNo ratings yet
- FC6 DatasheetDocument32 pagesFC6 DatasheetVivek SinghNo ratings yet
- 1.1 Productive Dev Full Stack Vue Net Core PostgresDocument10 pages1.1 Productive Dev Full Stack Vue Net Core PostgresDrono MariachiNo ratings yet
- JavaNotes1 F11Document15 pagesJavaNotes1 F11tshr2323No ratings yet
- L - A Common Lisp For Embedded SystemsDocument7 pagesL - A Common Lisp For Embedded Systemsjblair33No ratings yet
- The System For Simulation and Off-Line, Remote Programming of The Mitsubishi Movemaster RV-M1 RobotDocument8 pagesThe System For Simulation and Off-Line, Remote Programming of The Mitsubishi Movemaster RV-M1 RobotSebastian GuaquetaNo ratings yet
- Debugger For Power PC ProcessorsDocument6 pagesDebugger For Power PC Processorsi_luxiNo ratings yet
- 09 Java HandoutDocument238 pages09 Java HandoutAbhishek AmbekarNo ratings yet
- V Rep1Document51 pagesV Rep1Iulia CostacheNo ratings yet
- 10 VirtualizationDocument47 pages10 VirtualizationSupriyo MudiNo ratings yet
- NI Tutorial 11564 enDocument9 pagesNI Tutorial 11564 enpaula09No ratings yet
- Banking Graphical FullDocument22 pagesBanking Graphical FullKannan MNo ratings yet
- 1MA228 4e LabVIEW DriversDocument52 pages1MA228 4e LabVIEW DriversFabrizioToniNo ratings yet
- Virtual MachineDocument16 pagesVirtual Machineapi-19854229No ratings yet
- The Better Way Is Here Now: Programming Language Platform From SunDocument6 pagesThe Better Way Is Here Now: Programming Language Platform From Sunkirankrish113734No ratings yet
- AUTHOR: VISHAL P. TANK (M.Tech in Communication) INDIA (Ahmedabad) Cross CompilerDocument3 pagesAUTHOR: VISHAL P. TANK (M.Tech in Communication) INDIA (Ahmedabad) Cross CompilerVishal TankNo ratings yet
- VEE15Document14 pagesVEE15ma haijunNo ratings yet
- LabVIEW - Wikipedia, The Free EncyclopediaDocument8 pagesLabVIEW - Wikipedia, The Free Encyclopediabeta2009No ratings yet
- RTOS6Document20 pagesRTOS6Krishna ChaitanyaNo ratings yet
- Preface: Winftp Will Be An Application Which Will Provide Its Users A FTP Server ToDocument23 pagesPreface: Winftp Will Be An Application Which Will Provide Its Users A FTP Server Tobhuvn566No ratings yet
- Cross-Level Sensor Network Simulation With COOJADocument8 pagesCross-Level Sensor Network Simulation With COOJARaja MadhuvanthiNo ratings yet
- Artikel Haptic SimulinkDocument17 pagesArtikel Haptic SimulinkMax Cárdenas MantillaNo ratings yet
- 1000 WordsDocument54 pages1000 WordsNeahl SyNo ratings yet
- EMBL01E-Module 4Document31 pagesEMBL01E-Module 4Ronny Fae FabonNo ratings yet
- Mambo - A Full System Simulator For The Powerpc ArchitectureDocument5 pagesMambo - A Full System Simulator For The Powerpc ArchitecturegarciamaxNo ratings yet
- Proteus IntroductionDocument2 pagesProteus IntroductionmhemaraNo ratings yet
- Testing Embedded Software Using Simulated Hardware: Jakob Engblom, Guillaume Girard, Bengt WernerDocument9 pagesTesting Embedded Software Using Simulated Hardware: Jakob Engblom, Guillaume Girard, Bengt WernerStoune Stoune JRNo ratings yet
- Habitat SimDocument8 pagesHabitat SimAnonymous BeaverNo ratings yet
- Intermediate C Programming for the PIC Microcontroller: Simplifying Embedded ProgrammingFrom EverandIntermediate C Programming for the PIC Microcontroller: Simplifying Embedded ProgrammingNo ratings yet
- 06 Everyone Communicate Few Connect: ActivityDocument21 pages06 Everyone Communicate Few Connect: ActivityTindyo PrasetyoNo ratings yet
- Memuat Planning For The Next 10 Year - Jarot Supriyanto - d400204098Document7 pagesMemuat Planning For The Next 10 Year - Jarot Supriyanto - d400204098Tindyo PrasetyoNo ratings yet
- Memuat Planning For The Next 10 Year - Jarot Supriyanto - d400204098Document7 pagesMemuat Planning For The Next 10 Year - Jarot Supriyanto - d400204098Tindyo PrasetyoNo ratings yet
- PROINMA 08 Human Rources ManagementDocument10 pagesPROINMA 08 Human Rources ManagementTindyo PrasetyoNo ratings yet
- PROINMA 08 Human Rources ManagementDocument10 pagesPROINMA 08 Human Rources ManagementTindyo PrasetyoNo ratings yet
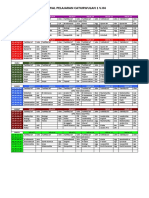
- V04 Jadwal PelajaranDocument1 pageV04 Jadwal PelajaranTindyo PrasetyoNo ratings yet
- AB 07 Rafif Kinematic Analysis of The Hexapod RobotDocument24 pagesAB 07 Rafif Kinematic Analysis of The Hexapod RobotTindyo PrasetyoNo ratings yet
- Jadwal Pelajaran V.03Document1 pageJadwal Pelajaran V.03Tindyo PrasetyoNo ratings yet
- V04 Jadwal PelajaranDocument1 pageV04 Jadwal PelajaranTindyo PrasetyoNo ratings yet
- Usulan Jadwal Idady Bahasa Arab PDFDocument1 pageUsulan Jadwal Idady Bahasa Arab PDFTindyo PrasetyoNo ratings yet
- Usulan Jadwal Idady Bahasa Arab PDFDocument1 pageUsulan Jadwal Idady Bahasa Arab PDFTindyo PrasetyoNo ratings yet
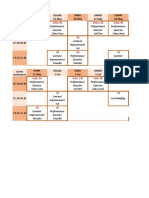
- Kelas 12A Kelas 9A Kelas 12B Kelas 9B: Senin Selasa Rabu Kamis Jumat 24-May 25-May 26-May 27-May 28-MayDocument2 pagesKelas 12A Kelas 9A Kelas 12B Kelas 9B: Senin Selasa Rabu Kamis Jumat 24-May 25-May 26-May 27-May 28-MayAmru AmirNo ratings yet
- Tugas Lk7 Dan 10 Garuda PancasilaDocument5 pagesTugas Lk7 Dan 10 Garuda PancasilaarifuddinNo ratings yet
- Professional Practice - X Sem - 2017-18 As On 16032018Document89 pagesProfessional Practice - X Sem - 2017-18 As On 16032018harshinireddy mandadiNo ratings yet
- 28-03-2023 Sed TicketsDocument8 pages28-03-2023 Sed TicketssureshhkNo ratings yet
- Nephrotic Syndrome Children PDFDocument11 pagesNephrotic Syndrome Children PDFesdl86No ratings yet
- My Day: Reading Materials I CourseDocument7 pagesMy Day: Reading Materials I CourseZeynab BagirovaNo ratings yet
- Barnum Distributors Wants A Projection of Cash Receipts and CashDocument1 pageBarnum Distributors Wants A Projection of Cash Receipts and CashAmit PandeyNo ratings yet
- Ultimate India Bucket ListDocument5 pagesUltimate India Bucket Listgacawe6143No ratings yet
- Calibration Form: This Form Should Be Filled Out and Sent With Your ShipmentDocument1 pageCalibration Form: This Form Should Be Filled Out and Sent With Your ShipmentLanco SANo ratings yet
- Chap3 Laterally Loaded Deep FoundationDocument46 pagesChap3 Laterally Loaded Deep Foundationtadesse habtieNo ratings yet
- Induction and Training Road-Map: GenpactDocument27 pagesInduction and Training Road-Map: GenpactShrey KanungoNo ratings yet
- Can Amitriptyline Makes You Feel More Awake Instead of DrowsyDocument3 pagesCan Amitriptyline Makes You Feel More Awake Instead of Drowsyteddypol100% (1)
- Yamuna Action PlanDocument12 pagesYamuna Action PlanShashank GargNo ratings yet
- Global ScriptDocument4 pagesGlobal ScriptAubrey Andrea OliverNo ratings yet
- 2023 HAC YemenDocument5 pages2023 HAC YemenRick AstleyNo ratings yet
- Growth and Instability of Cotton Crop in Major Cotton Growing States in IndiaDocument5 pagesGrowth and Instability of Cotton Crop in Major Cotton Growing States in IndiaMultidisciplinary JournalNo ratings yet
- Ruel Kennard O. Mallari: Objective Work ExperienceDocument3 pagesRuel Kennard O. Mallari: Objective Work ExperienceAntonette TagadiadNo ratings yet