You might also like
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Analysis of The Tata Consultancy ServiceDocument20 pagesAnalysis of The Tata Consultancy ServiceamalremeshNo ratings yet
- Honey ProcessingDocument5 pagesHoney Processingvenkatrao_gvNo ratings yet
- Complete Cocker Spaniel Guide 009 PDFDocument119 pagesComplete Cocker Spaniel Guide 009 PDFElmo RNo ratings yet
- IsaiahDocument7 pagesIsaiahJett Rovee Navarro100% (1)
- What Can Tesla Learn From Better Place's FailureDocument54 pagesWhat Can Tesla Learn From Better Place's Failuremail2jose_alex4293No ratings yet
- Robot 190 & 1110 Op - ManualsDocument112 pagesRobot 190 & 1110 Op - ManualsSergeyNo ratings yet
- Sub-Division Office SDO Wapda Line Superintendent SDO WapdaDocument2 pagesSub-Division Office SDO Wapda Line Superintendent SDO WapdaSattar BalochNo ratings yet
- Official Contact Numbers JazzDocument1 pageOfficial Contact Numbers JazzSattar BalochNo ratings yet
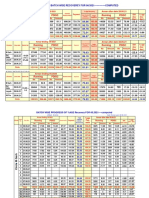
- Pdisc Running Pdisc Running: Abstract of Batch Wise Recoverey For 06/2021 - ComputedDocument27 pagesPdisc Running Pdisc Running: Abstract of Batch Wise Recoverey For 06/2021 - ComputedSattar BalochNo ratings yet
- DC Machines: D C MachineDocument44 pagesDC Machines: D C MachineSattar BalochNo ratings yet
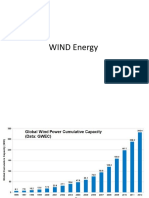
- Lecture Wind EnergyDocument32 pagesLecture Wind EnergySattar BalochNo ratings yet
- Entry Test Ad 2021Document2 pagesEntry Test Ad 2021Sattar BalochNo ratings yet
- Micro Hydropower PlantDocument18 pagesMicro Hydropower PlantSattar BalochNo ratings yet
- Chapter.2 Design of DC Machines Details To Be Specified While Ordering A DC Machine or Consumer's SpecificationDocument24 pagesChapter.2 Design of DC Machines Details To Be Specified While Ordering A DC Machine or Consumer's SpecificationSattar BalochNo ratings yet
- AC & DC WindingDocument29 pagesAC & DC WindingSattar BalochNo ratings yet
- Sycip v. CA (Sufficient Funds With The Drawee Bank)Document15 pagesSycip v. CA (Sufficient Funds With The Drawee Bank)Arnold BagalanteNo ratings yet
- Economis Project-MCOM SEM 1Document19 pagesEconomis Project-MCOM SEM 1Salma KhorakiwalaNo ratings yet
- Channels of CommunicationDocument3 pagesChannels of CommunicationIrin ChhinchaniNo ratings yet
- Trainee'S Record Book: Technical Education and Skills Development Authority (Your Institution)Document17 pagesTrainee'S Record Book: Technical Education and Skills Development Authority (Your Institution)Ronald Dequilla PacolNo ratings yet
- Assignment of Public Speaking Section A2Document2 pagesAssignment of Public Speaking Section A2Hamza KhalidNo ratings yet
- Electric Trains and Japanese Technology: Breakthrough in Japanese Railways 4Document9 pagesElectric Trains and Japanese Technology: Breakthrough in Japanese Railways 4Aee TrDNo ratings yet
- Maratua Island Survey ReportDocument8 pagesMaratua Island Survey ReportJoko TrisyantoNo ratings yet
- WIKADocument10 pagesWIKAPatnubay B TiamsonNo ratings yet
- The Civil Mutinies of Romeo and Juliet: Glenn ClarkDocument21 pagesThe Civil Mutinies of Romeo and Juliet: Glenn ClarkmilcahNo ratings yet
- United States Court of Appeals, Third CircuitDocument8 pagesUnited States Court of Appeals, Third CircuitScribd Government DocsNo ratings yet
- Knowledge, Attitude and Practice of Non-Allied Health Sciences Students of Southwestern University Phinma During The Covid-19 PandemicDocument81 pagesKnowledge, Attitude and Practice of Non-Allied Health Sciences Students of Southwestern University Phinma During The Covid-19 Pandemicgeorgemayhew1030No ratings yet
- Did Angels Have WingsDocument14 pagesDid Angels Have WingsArnaldo Esteves HofileñaNo ratings yet
- Bike Chasis DesignDocument7 pagesBike Chasis Designparth sarthyNo ratings yet
- Seminars - 09-12-2022 - Vanessa AQUINO CHAVESDocument3 pagesSeminars - 09-12-2022 - Vanessa AQUINO CHAVESVanessa AquinoNo ratings yet
- Referensi PUR - Urethane Surface coating-BlockedISO (Baxenden) - 20160802 PDFDocument6 pagesReferensi PUR - Urethane Surface coating-BlockedISO (Baxenden) - 20160802 PDFFahmi Januar AnugrahNo ratings yet
- 6977 - Read and Answer The WorksheetDocument1 page6977 - Read and Answer The Worksheetmohamad aliNo ratings yet
- Solution Document For Link LoadBalancerDocument10 pagesSolution Document For Link LoadBalanceraralNo ratings yet
- Visual Acuity: Opthalmology CEX StepsDocument5 pagesVisual Acuity: Opthalmology CEX StepsVanessa HermioneNo ratings yet
- Internship Report On A Study of The Masterbranding of Dove: Urmee Rahman SilveeDocument45 pagesInternship Report On A Study of The Masterbranding of Dove: Urmee Rahman SilveeVIRAL DOSHINo ratings yet
- DB - Empirically Based TheoriesDocument3 pagesDB - Empirically Based TheoriesKayliah BaskervilleNo ratings yet
- 1907 EMarketer GEN XDocument16 pages1907 EMarketer GEN XRodolfo CampaNo ratings yet
- Soal Pas Myob Kelas Xii GanjilDocument4 pagesSoal Pas Myob Kelas Xii GanjilLank BpNo ratings yet
- 2011 06 13-DI-PER8-Acoustic Insulation Catalogue-Rev 01Document12 pages2011 06 13-DI-PER8-Acoustic Insulation Catalogue-Rev 01Tien PhamNo ratings yet
- Exam Questions AZ-304: Microsoft Azure Architect Design (Beta)Document9 pagesExam Questions AZ-304: Microsoft Azure Architect Design (Beta)Deepa R NairNo ratings yet