You might also like
- Assembly Programming:Simple, Short, And Straightforward Way Of Learning Assembly LanguageFrom EverandAssembly Programming:Simple, Short, And Straightforward Way Of Learning Assembly LanguageRating: 5 out of 5 stars5/5 (1)
- Assembly Language Fundamentals GuideDocument54 pagesAssembly Language Fundamentals GuideJonah Marwa WilliamNo ratings yet
- Computer Organization & Assembly LanguageDocument59 pagesComputer Organization & Assembly LanguageMuzaffar SalikNo ratings yet
- Unit-V 6703Document84 pagesUnit-V 6703Ragunath T100% (1)
- Asembly Language 2Document60 pagesAsembly Language 2BHAKTI YOGANo ratings yet
- Lab 02 - First Assembly Language ProgramDocument7 pagesLab 02 - First Assembly Language ProgramMuath AfeshatNo ratings yet
- Embedded Systems: Department of Electrical and Computer Engineering MWU UniversityDocument32 pagesEmbedded Systems: Department of Electrical and Computer Engineering MWU UniversitySamuel AdamuNo ratings yet
- Programming The PSoC With 8051 Assembly InstructionsDocument6 pagesProgramming The PSoC With 8051 Assembly InstructionsAdwitiyaNo ratings yet
- Assemblynotes Revised2010Document17 pagesAssemblynotes Revised2010Ojibwe UnanimesNo ratings yet
- Assembly Language Fundamentals (ALFDocument31 pagesAssembly Language Fundamentals (ALFRizza Ninia MabugayNo ratings yet
- Assembly Language Program - Part IDocument9 pagesAssembly Language Program - Part ILAI GUAN HONGNo ratings yet
- C ProgrammingDocument40 pagesC ProgrammingDinesh LasanthaNo ratings yet
- System Software and Compiler DesignDocument34 pagesSystem Software and Compiler Designsourabha DNo ratings yet
- KV Dsflab Mini Projects 2020 PDFDocument5 pagesKV Dsflab Mini Projects 2020 PDFkundu.banhimitraNo ratings yet
- Difference between compiler and interpreterDocument7 pagesDifference between compiler and interpreterAleeza AnjumNo ratings yet
- LAB#2Document9 pagesLAB#2Yousuf JamalNo ratings yet
- Multi-threaded Producer Consumer PipelineDocument7 pagesMulti-threaded Producer Consumer PipelineSCA7th0% (1)
- CSE 232 Systems Programming: Lecture Notes #2Document9 pagesCSE 232 Systems Programming: Lecture Notes #2Neeraj KumarNo ratings yet
- Week - 1Document24 pagesWeek - 1Jolly PersonNo ratings yet
- Chapter 2 - Basic Programming constructorsDocument74 pagesChapter 2 - Basic Programming constructorsAhmed YassinNo ratings yet
- Structure of C Programming - Improved SlidesDocument56 pagesStructure of C Programming - Improved SlidesNursyahira Binti ShallehinNo ratings yet
- Microcontroller Assembly Language ProgrammingDocument52 pagesMicrocontroller Assembly Language ProgrammingMuaz ShahidNo ratings yet
- System Software NotesDocument97 pagesSystem Software NotesTheerthesh Gowda100% (1)
- Lecture 16Document19 pagesLecture 16abdul rehmanNo ratings yet
- Computer - Hardware: Arithmetic and Logic UnitDocument24 pagesComputer - Hardware: Arithmetic and Logic UnitBabuNo ratings yet
- Program: Programming Languages Machine LanguageDocument3 pagesProgram: Programming Languages Machine Languagefarzana kousarNo ratings yet
- 1 - Core C# Programming Constructs - Part IDocument66 pages1 - Core C# Programming Constructs - Part IEbisa DugoNo ratings yet
- Machine-Level Programming I: Basics on x86-64 and IA32Document47 pagesMachine-Level Programming I: Basics on x86-64 and IA32Sudarshan SureshNo ratings yet
- SS Module 1Document72 pagesSS Module 1Yashas YashuNo ratings yet
- Lab 1 SlidesDocument28 pagesLab 1 SlidesJosé CastilloNo ratings yet
- University Institute of Engineering Department of Computer Science & EngineeringDocument14 pagesUniversity Institute of Engineering Department of Computer Science & EngineeringSayan KarNo ratings yet
- Mpal 2012 PDFDocument80 pagesMpal 2012 PDFudamtewNo ratings yet
- IBM Mainframe COBOL Programming GuideDocument129 pagesIBM Mainframe COBOL Programming Guidekishor kumarNo ratings yet
- Case Study Assemblers For X85 and X86Document14 pagesCase Study Assemblers For X85 and X86pahalwan80% (5)
- 2 - Introduction To CompilationDocument13 pages2 - Introduction To CompilationShaddyNo ratings yet
- Mad Unit 3-JntuworldDocument53 pagesMad Unit 3-JntuworldDilip TheLipNo ratings yet
- SSCD Module1Document72 pagesSSCD Module1Chirag UNo ratings yet
- HDL LAB EXPERIMENTS AND CODESDocument76 pagesHDL LAB EXPERIMENTS AND CODESvijaykannamallaNo ratings yet
- Manual AsseDocument7 pagesManual AsseIqra GuriyaNo ratings yet
- Introduction To Compiler Construction: Robert Van EngelenDocument13 pagesIntroduction To Compiler Construction: Robert Van EngelenNamrata BorkarNo ratings yet
- B CPE 201 CorewarDocument10 pagesB CPE 201 CorewarDarian SerenoNo ratings yet
- Objective: To Understand The Basic Concept and Functionality of Assembly LanguageDocument9 pagesObjective: To Understand The Basic Concept and Functionality of Assembly LanguageKAMRAN KHANNo ratings yet
- Chapter 1: The Discipline of Computing: Computer Science - XIDocument10 pagesChapter 1: The Discipline of Computing: Computer Science - XIHarshya RajeevanNo ratings yet
- Microprocessor Lab1Document3 pagesMicroprocessor Lab1kidu100% (1)
- 19MS012, EEE Submission, Datir PranavDocument66 pages19MS012, EEE Submission, Datir PranavKartik BhagatNo ratings yet
- Parallel port tutorial for beginnersDocument8 pagesParallel port tutorial for beginnersNurul Hanim OmarNo ratings yet
- GFS-154B M07 Introduction To The Process DatabaseDocument19 pagesGFS-154B M07 Introduction To The Process Databaseeesandoval.aNo ratings yet
- CS 346: Code Generation: ResourceDocument52 pagesCS 346: Code Generation: ResourceAbhijit KaranNo ratings yet
- Monitor-51: For The 8051 FamilyDocument3 pagesMonitor-51: For The 8051 FamilyLuis TavisNo ratings yet
- Practical Lab 2Document9 pagesPractical Lab 2Vishal KumarNo ratings yet
- COA Lecture on Assembly Language ProgrammingDocument16 pagesCOA Lecture on Assembly Language ProgrammingArafatNo ratings yet
- Embedded Systems EE 354 ES Lab 02Document12 pagesEmbedded Systems EE 354 ES Lab 02AimanNo ratings yet
- 4 - Processor FundanmentalsDocument9 pages4 - Processor FundanmentalsAayan AhmadNo ratings yet
- CD Lab ManualDocument49 pagesCD Lab ManualPRIYA RAJI88% (17)
- Introduction To Compiler Construction: Robert Van EngelenDocument13 pagesIntroduction To Compiler Construction: Robert Van EngelensanchiNo ratings yet
- Embedded C ProgmngDocument42 pagesEmbedded C ProgmngJyoti Sankar SahooNo ratings yet
- Lab 2Document10 pagesLab 2waleedNo ratings yet
- CPE 325: Embedded Systems Laboratory Laboratory Assignment #4Document2 pagesCPE 325: Embedded Systems Laboratory Laboratory Assignment #4Sheeraz AliNo ratings yet
- Assembly Language Fundamentals: Javeria AminDocument42 pagesAssembly Language Fundamentals: Javeria AminAtiqa SafdarNo ratings yet
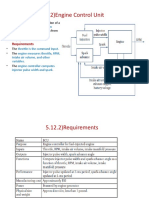
- 5.12) Engine Control Unit: 5.12.1) Operation and RequirementsDocument7 pages5.12) Engine Control Unit: 5.12.1) Operation and RequirementsManikandan AnnamalaiNo ratings yet
- Unit V Processes and Operating SystemsDocument37 pagesUnit V Processes and Operating SystemsManikandan Annamalai100% (1)
- Final ES PDFDocument176 pagesFinal ES PDFFarida ShaikNo ratings yet
- 5.11.1) Operation and Requirements: 5.11) Audio player/MP3 PlayerDocument10 pages5.11.1) Operation and Requirements: 5.11) Audio player/MP3 PlayerManikandan AnnamalaiNo ratings yet
- EC6703Document2 pagesEC6703Manikandan AnnamalaiNo ratings yet
- LPC2148 Microcontroller Architecture andDocument50 pagesLPC2148 Microcontroller Architecture andManikandan AnnamalaiNo ratings yet
- EC6703Document2 pagesEC6703Manikandan AnnamalaiNo ratings yet
- Unit Iv Hardware Accelerates & NetworksDocument59 pagesUnit Iv Hardware Accelerates & NetworksManikandan AnnamalaiNo ratings yet
- Unit Iii Process and Operating SystemsDocument57 pagesUnit Iii Process and Operating SystemsManikandan AnnamalaiNo ratings yet
- Unit 1-ERTSDocument140 pagesUnit 1-ERTSManikandan AnnamalaiNo ratings yet
- AFOT SeriesDocument72 pagesAFOT SeriesCristihan RenteriaNo ratings yet
- Dipole Antenna ManualDocument16 pagesDipole Antenna ManualSrihari RadhakrishnanNo ratings yet
- Signal Integrity For PCB Designers EbookDocument12 pagesSignal Integrity For PCB Designers Ebookzahi xddNo ratings yet
- Problem 9.1 in Practice, We Often Cannot Measure The Signal by Itself But Must MeasureDocument40 pagesProblem 9.1 in Practice, We Often Cannot Measure The Signal by Itself But Must MeasureJoel Simmons100% (2)
- Re - 1973-03Document100 pagesRe - 1973-03Anonymous kdqf49qb100% (1)
- DR 140 TDocument43 pagesDR 140 TAndrei MarinasNo ratings yet
- Syren 10 / Syren 25 Motor Driver User'S Guide: July 2007Document20 pagesSyren 10 / Syren 25 Motor Driver User'S Guide: July 2007Stephen TyeNo ratings yet
- Drone University - Glover, JohnDocument424 pagesDrone University - Glover, JohnMohammad Samir100% (1)
- Design and Construction of an FM TransmitterDocument42 pagesDesign and Construction of an FM Transmittermamdouhkh83% (12)
- Yamaha ENG Spring11 rx-v71Document8 pagesYamaha ENG Spring11 rx-v71tranganilloNo ratings yet
- KEY KME-150 Service ManualDocument53 pagesKEY KME-150 Service Manualjmccall_22100% (1)
- 190 00181 02 - TDocument140 pages190 00181 02 - TMonika Estevez100% (1)
- Pundit 2 - Operating Instructions - EnglishDocument51 pagesPundit 2 - Operating Instructions - EnglishZin Myo MinNo ratings yet
- FD1 ResumeDocument11 pagesFD1 ResumeFrantz DenisNo ratings yet
- Radio Navigation and Communication SystemsDocument259 pagesRadio Navigation and Communication SystemsAyan AcharyaNo ratings yet
- Automatic Pneumatic Bumper For Four WheelerDocument5 pagesAutomatic Pneumatic Bumper For Four WheelerPrashant BachhavNo ratings yet
- Transmitter Simulink StudyDocument38 pagesTransmitter Simulink StudyLucky Asr AwaisNo ratings yet
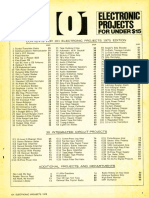
- 101 Electronics Projects 1975Document98 pages101 Electronics Projects 1975Miroslav Prodana100% (1)
- 4790 SeriesDocument124 pages4790 Serieskass_ecsNo ratings yet
- 1KR FE+Service+ManualDocument2,784 pages1KR FE+Service+ManualCajas Automaticas David100% (5)
- TV Troubleshoot ManualDocument9 pagesTV Troubleshoot Manualthes0uljahgirlNo ratings yet
- Telewave Catalog 31Document319 pagesTelewave Catalog 31Jose Gregorio GomezNo ratings yet
- Telecrane Radio Remote Control F21 Series & F24 Series ManualDocument40 pagesTelecrane Radio Remote Control F21 Series & F24 Series Manualelin373No ratings yet
- Introduction To Kelly Radionic AntennasDocument11 pagesIntroduction To Kelly Radionic AntennasGavrila Lucian100% (1)
- © Copr. 1949-1998 Hewlett-Packard CoDocument40 pages© Copr. 1949-1998 Hewlett-Packard CoantoinegrenobleNo ratings yet
- NX 3220 3320Document2 pagesNX 3220 3320dgrsriNo ratings yet
- Sat ComDocument4 pagesSat ComKit Jason MonjeNo ratings yet
- HittechDocument28 pagesHittechnitinmgNo ratings yet
- Sagemcom Dsi86hd-ManualDocument40 pagesSagemcom Dsi86hd-ManualLuis Eduardo RibeiroNo ratings yet
- Topic 4 Radar System Jun2020Document87 pagesTopic 4 Radar System Jun2020Nabilah DaudNo ratings yet