You might also like
- Nuts & Volts September 2007Document108 pagesNuts & Volts September 2007Steven ClementsNo ratings yet
- Appendix Dspace and Real Time Interface in SimulinkDocument9 pagesAppendix Dspace and Real Time Interface in SimulinkohmprakashNo ratings yet
- Microprocessors & their Operating Systems: A Comprehensive Guide to 8, 16 & 32 Bit Hardware, Assembly Language & Computer ArchitectureFrom EverandMicroprocessors & their Operating Systems: A Comprehensive Guide to 8, 16 & 32 Bit Hardware, Assembly Language & Computer ArchitectureRating: 1 out of 5 stars1/5 (1)
- C2xx DSP CPU and Instruction Set GuideDocument43 pagesC2xx DSP CPU and Instruction Set GuideJatin Yadav100% (2)
- Main Ic Renesis Master Datasheet PDFDocument223 pagesMain Ic Renesis Master Datasheet PDFshriyaNo ratings yet
- ProMark500 RM E en PDFDocument462 pagesProMark500 RM E en PDFStremțan Adrian MihaiNo ratings yet
- Microprocessor Architectures and Systems: RISC, CISC and DSPFrom EverandMicroprocessor Architectures and Systems: RISC, CISC and DSPRating: 4 out of 5 stars4/5 (1)
- IoT Trend Watch EbookDocument27 pagesIoT Trend Watch EbookQuan Luong100% (1)
- PIC16f877A Microcontrollers and Embedded SystemsDocument43 pagesPIC16f877A Microcontrollers and Embedded SystemsTarek BarhoumNo ratings yet
- IC 045 Embedded Sys Design PPT 5Document51 pagesIC 045 Embedded Sys Design PPT 5RajendraPrasadSahuNo ratings yet
- R5F562TAADFHDocument94 pagesR5F562TAADFHRamiro ArriagaNo ratings yet
- PIC16F18855 ModDocument662 pagesPIC16F18855 Modwhynot05No ratings yet
- Atmega 32 SMDDocument25 pagesAtmega 32 SMDHEINERTH ROMERO MACASNo ratings yet
- 8-Bit Single Chip Microcontroller LC877B00A: Under-DevelopmentDocument28 pages8-Bit Single Chip Microcontroller LC877B00A: Under-DevelopmentJobson SouzaNo ratings yet
- General DescriptionDocument55 pagesGeneral DescriptionChuyen NguyenNo ratings yet
- ATtiny 26Document18 pagesATtiny 26Alex TocagonNo ratings yet
- ATmega 1284 PDocument13 pagesATmega 1284 PWasang Juwi PracihnoNo ratings yet
- ARM7 Microcontroller Technical SpecificationsDocument2 pagesARM7 Microcontroller Technical SpecificationsSanket PatilNo ratings yet
- Arduino Uno r3 PDFDocument9 pagesArduino Uno r3 PDFAnonymous ytZsBOVNo ratings yet
- Arduino Uno r3 DatasheetDocument9 pagesArduino Uno r3 DatasheetAndreea IlieNo ratings yet
- SSFDFDocument9 pagesSSFDFMaycol ParicahuaNo ratings yet
- Arduino Uno R3: The Popular Microcontroller BoardDocument9 pagesArduino Uno R3: The Popular Microcontroller BoardDanies Forensky IrawanNo ratings yet
- Arduino Uno r3 PDFDocument9 pagesArduino Uno r3 PDFDANIEL ALEJANDRO LEMUS RINCONNo ratings yet
- Arduino Uno r3 PDFDocument9 pagesArduino Uno r3 PDFKosehati FarmNo ratings yet
- S1c17w04 DatasheetDocument10 pagesS1c17w04 DatasheetOcean AtlanticNo ratings yet
- ATtiny 26Document19 pagesATtiny 26Randiguru NyhNo ratings yet
- AT89LP6440Document200 pagesAT89LP6440cmbataginiNo ratings yet
- PIC16F767Document280 pagesPIC16F767khaledbenamorNo ratings yet
- 90PWM216 316 A0307Document349 pages90PWM216 316 A0307Fariha NaazNo ratings yet
- ID-LA-IsO Series Low Cost RFID Reader Module Used Animal Tagging LF ISO11785Document10 pagesID-LA-IsO Series Low Cost RFID Reader Module Used Animal Tagging LF ISO11785AbleIDLtdNo ratings yet
- Hardware Architecture Of 8051 MicrocontrollerDocument28 pagesHardware Architecture Of 8051 MicrocontrollerUtkarsh VermaNo ratings yet
- M 168Document376 pagesM 168long_address_shortNo ratings yet
- Identitas BarangDocument42 pagesIdentitas BarangdikatokNo ratings yet
- ARM7 LPC2129 Processor RegistersDocument34 pagesARM7 LPC2129 Processor RegistersAnchal ChaturvedyNo ratings yet
- ATmega32 SummaryDocument18 pagesATmega32 SummaryRajesh KumarNo ratings yet
- Application Note ATtiny32Document13 pagesApplication Note ATtiny32Neeraj MauryaNo ratings yet
- 8-Bit Microcontroller With 32K Bytes In-System Programmable Flash Atmega32ADocument18 pages8-Bit Microcontroller With 32K Bytes In-System Programmable Flash Atmega32Amiusuario_1022No ratings yet
- ATmega16 PDFDocument359 pagesATmega16 PDFAndre PdNo ratings yet
- LPC2148 Pro Development BoardDocument2 pagesLPC2148 Pro Development BoardRajasekar PanneerselvamNo ratings yet
- Embedded Systems For ECEDocument92 pagesEmbedded Systems For ECESurudhi AsokrajNo ratings yet
- Unit V&viDocument57 pagesUnit V&viSekhar ReddyNo ratings yet
- At Mega 328Document566 pagesAt Mega 328Jeremy BartlettNo ratings yet
- 8-Bit Microcontroller With 4/8K Bytes In-System Programmable Flash Attiny48/88Document302 pages8-Bit Microcontroller With 4/8K Bytes In-System Programmable Flash Attiny48/88sroaaNo ratings yet
- PIC Introduction PDFDocument46 pagesPIC Introduction PDFPeeyush Kp100% (1)
- 8-Bit Microcontroller With 16K Bytes In-System Programmable Flash Atmega16 Atmega16LDocument349 pages8-Bit Microcontroller With 16K Bytes In-System Programmable Flash Atmega16 Atmega16LIon CapcanariNo ratings yet
- 8-Bit Microcontroller With 256K Bytes In-System Programmable Flash Atmega1281/25 61/V Atmega640/128 0/2560/V Advance InformationDocument24 pages8-Bit Microcontroller With 256K Bytes In-System Programmable Flash Atmega1281/25 61/V Atmega640/128 0/2560/V Advance Informationmike_helplineNo ratings yet
- ATMEGA32 16PU Atmel Datasheet 530750Document345 pagesATMEGA32 16PU Atmel Datasheet 530750Lakshay KachrooNo ratings yet
- PROJECT USING MICROCONTROLLER ATMEGA16Document34 pagesPROJECT USING MICROCONTROLLER ATMEGA16KARTHIK S SNo ratings yet
- LPC2103 hardware structure guideDocument104 pagesLPC2103 hardware structure guideBắc HoàiNo ratings yet
- Unit IV PIC Microcontroller Architecture: Features, Comparison & Selection of PIC Series As Per ApplicationDocument53 pagesUnit IV PIC Microcontroller Architecture: Features, Comparison & Selection of PIC Series As Per ApplicationJohn GonsalvesNo ratings yet
- Atmel 7647 Automotive Microcontrollers ATmega16M1 32M1 64M1 32C1 64C1 DatasheetDocument318 pagesAtmel 7647 Automotive Microcontrollers ATmega16M1 32M1 64M1 32C1 64C1 DatasheetakshatNo ratings yet
- 8-Bit Microcontroller With 1K Byte Flash Attiny15L: FeaturesDocument6 pages8-Bit Microcontroller With 1K Byte Flash Attiny15L: Featuresmanju439No ratings yet
- LC8635 XX CDocument17 pagesLC8635 XX CFagh AbdoulNo ratings yet
- Ec6711 Emb Lab PDFDocument92 pagesEc6711 Emb Lab PDFAnonymous LXQnmsD100% (1)
- c8051f340 ShortDocument1 pagec8051f340 Short陳進含No ratings yet
- AtMega32 Data SheetDocument313 pagesAtMega32 Data SheetSumeet TiwanaNo ratings yet
- Modul Mikrokontroler 06 Pengenalan TimerDocument15 pagesModul Mikrokontroler 06 Pengenalan Timerrei_za931875No ratings yet
- LPC 2129Document34 pagesLPC 2129piyushji125No ratings yet
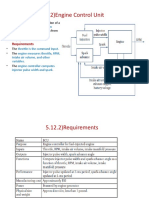
- 5.12) Engine Control Unit: 5.12.1) Operation and RequirementsDocument7 pages5.12) Engine Control Unit: 5.12.1) Operation and RequirementsManikandan AnnamalaiNo ratings yet
- 5.11.1) Operation and Requirements: 5.11) Audio player/MP3 PlayerDocument10 pages5.11.1) Operation and Requirements: 5.11) Audio player/MP3 PlayerManikandan AnnamalaiNo ratings yet
- Unit V Processes and Operating SystemsDocument37 pagesUnit V Processes and Operating SystemsManikandan Annamalai100% (1)
- EC6703Document2 pagesEC6703Manikandan AnnamalaiNo ratings yet
- Final ES PDFDocument176 pagesFinal ES PDFFarida ShaikNo ratings yet
- Unit Iv Hardware Accelerates & NetworksDocument59 pagesUnit Iv Hardware Accelerates & NetworksManikandan AnnamalaiNo ratings yet
- Unit 5-ERTSDocument48 pagesUnit 5-ERTSManikandan AnnamalaiNo ratings yet
- EC6703Document2 pagesEC6703Manikandan AnnamalaiNo ratings yet
- Unit 1-ERTSDocument140 pagesUnit 1-ERTSManikandan AnnamalaiNo ratings yet
- Unit Iii Process and Operating SystemsDocument57 pagesUnit Iii Process and Operating SystemsManikandan AnnamalaiNo ratings yet
- Edexcel Computer p1-2Document254 pagesEdexcel Computer p1-2sohailbrothersNo ratings yet
- 05 Office StaffDocument14 pages05 Office StaffCIS AdminNo ratings yet
- b2 First Reading Uoe Part 1 Covid 19Document3 pagesb2 First Reading Uoe Part 1 Covid 19Azly M SabinNo ratings yet
- Design Inverting & Non-Inverting Amplifiers Using Op-Amp IC 741Document11 pagesDesign Inverting & Non-Inverting Amplifiers Using Op-Amp IC 741Ted MosbyNo ratings yet
- S67-1575-132-133 SpecificationDocument1 pageS67-1575-132-133 SpecificationsahandonfireNo ratings yet
- History of Mp3 PlayerDocument26 pagesHistory of Mp3 PlayerbrobardNo ratings yet
- Module-5-Final GMITDocument20 pagesModule-5-Final GMITmvs sowmyaNo ratings yet
- Troubleshooting For Rb433R3, Rb433Ur2: No Power, Blue Led Isn'T LitDocument7 pagesTroubleshooting For Rb433R3, Rb433Ur2: No Power, Blue Led Isn'T LitJoseAugustoOsteicoechea100% (1)
- Simulated Output FullDocument33 pagesSimulated Output FullrbkNo ratings yet
- Securing SCADA-based Critical InfrastructuresDocument7 pagesSecuring SCADA-based Critical InfrastructuresArturo Olavarría GodoyNo ratings yet
- Pps Time Table PrimaryDocument3 pagesPps Time Table PrimarySalam PennieNo ratings yet
- Computer, Internet, Web, and E-Mail Basics: Computer Concepts 8th Edition Parsons/OjaDocument76 pagesComputer, Internet, Web, and E-Mail Basics: Computer Concepts 8th Edition Parsons/OjaRafael Leonardo Guzman RodriguezNo ratings yet
- Ans: The Four Things That Are Need To Be Kept in Mind Are A. Framing B. Line-Coding C. Switch Type D. Clock SourceDocument7 pagesAns: The Four Things That Are Need To Be Kept in Mind Are A. Framing B. Line-Coding C. Switch Type D. Clock Sourcesumit rustagiNo ratings yet
- Precision rectifiers: circuits for converting AC to DC with minimal distortionDocument7 pagesPrecision rectifiers: circuits for converting AC to DC with minimal distortionDr. Balraj SinghNo ratings yet
- Industrial PCs and Displays - 2016Document88 pagesIndustrial PCs and Displays - 2016FelipeOliveiraNo ratings yet
- ??????? ??? ?????? ?? ???????? ???????? ????? ?????Document206 pages??????? ??? ?????? ?? ???????? ???????? ????? ?????Abhishek MishraNo ratings yet
- S3.2 (ARFM) Spectrum Making 5G A Reality - 20marDocument9 pagesS3.2 (ARFM) Spectrum Making 5G A Reality - 20mardtvt40No ratings yet
- CSEC Information Technology June 2015 P02Document18 pagesCSEC Information Technology June 2015 P02SiennaNo ratings yet
- XM Satellite Ready and SIRIUS Satellite Ready 5-Channel A/V Receiver Featuring HDMIDocument2 pagesXM Satellite Ready and SIRIUS Satellite Ready 5-Channel A/V Receiver Featuring HDMIThe SellerNo ratings yet
- Langkawi Ferry Line boarding passesDocument4 pagesLangkawi Ferry Line boarding passesChang Hooi YinNo ratings yet
- PMT Hps Ce03 100 172Document73 pagesPMT Hps Ce03 100 172Xavier LopezNo ratings yet
- Mini CaseDocument13 pagesMini CaseTony Philip JoykuttyNo ratings yet
- SWG 3 Huawei 5G EvolutionDocument14 pagesSWG 3 Huawei 5G EvolutionThanh HoangNo ratings yet
- User Manual Sony Bravia KLV-40R452A (English - 2 Pages)Document3 pagesUser Manual Sony Bravia KLV-40R452A (English - 2 Pages)anthonytoledoNo ratings yet
- T-VLF Radio Wave ReceiverDocument2 pagesT-VLF Radio Wave ReceiverihsanNo ratings yet
- Akai vsj4600Document17 pagesAkai vsj4600Alan JayceeNo ratings yet