You might also like
- Analytical Questions: ELEN 4810 Homework 3Document7 pagesAnalytical Questions: ELEN 4810 Homework 3qwentionNo ratings yet
- COVID-19 Routes of Transmission - What We Know So Far: SynthesisDocument44 pagesCOVID-19 Routes of Transmission - What We Know So Far: SynthesisSiamakNo ratings yet
- ENGN4528 and ENGN6528 Computer Vision Binary and MorphologyDocument87 pagesENGN4528 and ENGN6528 Computer Vision Binary and Morphologyalfalfa manNo ratings yet
- Experiment 4: Aim: Software UsedDocument6 pagesExperiment 4: Aim: Software UsedSaumyaNo ratings yet
- Particle Image VelocimetryDocument57 pagesParticle Image VelocimetryNathan Zammit MumaNo ratings yet
- Direct Volume Rendering (DVR) : Ray-Casting: Mengxia Zhu Fall 2007Document35 pagesDirect Volume Rendering (DVR) : Ray-Casting: Mengxia Zhu Fall 2007Chim RuồiNo ratings yet
- Rietveld Analysis of XRD PatternsDocument46 pagesRietveld Analysis of XRD PatternsMohamed Elwi MitwallyNo ratings yet
- Computer Graphics and Animation: Focusing System Magnetic Deflection Coils CathodeDocument24 pagesComputer Graphics and Animation: Focusing System Magnetic Deflection Coils CathodeNilesh GuptaNo ratings yet
- Direct Volume Rendering Ray-casting TechniquesDocument53 pagesDirect Volume Rendering Ray-casting TechniquesnikhilaNo ratings yet
- Presentation 520Document15 pagesPresentation 520Automatizacion UdecNo ratings yet
- Measuring Height: T B R R B TDocument51 pagesMeasuring Height: T B R R B TПавел СоколовNo ratings yet
- Bilateral Filter ExplainedDocument2 pagesBilateral Filter ExplainedAccounts EnglishNo ratings yet
- DSPDocument46 pagesDSP呂政皓No ratings yet
- Lec 1 PrintDocument13 pagesLec 1 PrintPolito PogbaNo ratings yet
- SSP 4 2 - Modelling 2Document34 pagesSSP 4 2 - Modelling 2Gabor GerebNo ratings yet
- A Brief Introduction To Medical Imaging: OutlineDocument30 pagesA Brief Introduction To Medical Imaging: OutlineBahareh Bozorg ChamiNo ratings yet
- 08 HighDimensional PDFDocument88 pages08 HighDimensional PDFMatheus SilvaNo ratings yet
- 08 HighDimensional PDFDocument88 pages08 HighDimensional PDFMatheus SilvaNo ratings yet
- Spatial Domain Image Processing)Document64 pagesSpatial Domain Image Processing)Getachew Yizengaw Enyew0% (1)
- Sampling SlidesDocument38 pagesSampling Slidesjesusmb1995No ratings yet
- Monte Carlo Sampling MethodsDocument25 pagesMonte Carlo Sampling Methodsnyj martinNo ratings yet
- Optical Flow: Rizwan ManzoorDocument31 pagesOptical Flow: Rizwan ManzoorRock OnNo ratings yet
- NN TheoryDocument138 pagesNN TheoryGunjan KhutNo ratings yet
- GlobalMotion Image ProcessingDocument62 pagesGlobalMotion Image ProcessingRinku PalNo ratings yet
- Clustering Part1Document19 pagesClustering Part1daniel.oleaNo ratings yet
- Lecture 1Document48 pagesLecture 1GauravNo ratings yet
- Introduction to CNNs for Image ClassificationDocument96 pagesIntroduction to CNNs for Image ClassificationIbrahim IsleemNo ratings yet
- Lect 4Document38 pagesLect 4Alamgir khanNo ratings yet
- SR 01 07Document37 pagesSR 01 07Bhavik PatelNo ratings yet
- Advanced Methods For Image Segmentation: Ilya Pollak Purdue UniversityDocument49 pagesAdvanced Methods For Image Segmentation: Ilya Pollak Purdue UniversityGaurav ParwalNo ratings yet
- Data ScienceDocument56 pagesData ScienceMarcelo MirandaNo ratings yet
- MiniandgeneticDocument13 pagesMiniandgeneticapi-3854995No ratings yet
- Image Warping and Morphing: 15-463: Computational Photography Alexei Efros, CMU, Fall 2011Document40 pagesImage Warping and Morphing: 15-463: Computational Photography Alexei Efros, CMU, Fall 2011pcbugNo ratings yet
- Introduction to Model Predictive Control (MPCDocument50 pagesIntroduction to Model Predictive Control (MPCcbqucbquNo ratings yet
- Lecture 6 - Spectrum Estimation PDFDocument47 pagesLecture 6 - Spectrum Estimation PDFMahy Magdy0% (1)
- Color Image Sharpening Using DST-Based Matrix Low-Pass Butterworth FiltersDocument2 pagesColor Image Sharpening Using DST-Based Matrix Low-Pass Butterworth FiltersIra CervoNo ratings yet
- 3 Non Linear ClassifiersDocument74 pages3 Non Linear ClassifiersVaishali DNo ratings yet
- A4 SolutionDocument1 pageA4 SolutionJOhn StenselsonNo ratings yet
- Study of Fractal Image CompressionDocument5 pagesStudy of Fractal Image CompressionGiuseppe CantarellaNo ratings yet
- Dimensionality Reduction Using PCA (Principal Component Analysis)Document13 pagesDimensionality Reduction Using PCA (Principal Component Analysis)kolluriniteesh111No ratings yet
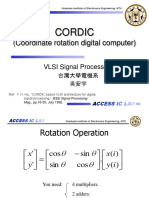
- Graduate Institute of Electronics Engineering CORDIC VLSIDocument25 pagesGraduate Institute of Electronics Engineering CORDIC VLSIAchuNo ratings yet
- Quiz 22Document6 pagesQuiz 22dasm04675No ratings yet
- Optimum Global Thresholding Using Otsu's MethodDocument5 pagesOptimum Global Thresholding Using Otsu's MethodMay Phyu KhinNo ratings yet
- Ya Ya Y: 2 1 XX CenterDocument10 pagesYa Ya Y: 2 1 XX Centerapi-630992605No ratings yet
- DSP II Math BackgroundDocument21 pagesDSP II Math BackgroundraviNo ratings yet
- ANA Projects ListDocument44 pagesANA Projects ListRaul GarciaNo ratings yet
- Lecture 12Document33 pagesLecture 12Jaafar AbbakarNo ratings yet
- Eng4Bf3 Medical Image Processing: Wavelet and Multiresolution ProcessingDocument49 pagesEng4Bf3 Medical Image Processing: Wavelet and Multiresolution ProcessingSelva KumarNo ratings yet
- A5CoalMineDocument7 pagesA5CoalMineBridge Iit At RanchiNo ratings yet
- Ece411 - 3 - Dt-Lti SystemsDocument23 pagesEce411 - 3 - Dt-Lti SystemsMartine JimenezNo ratings yet
- Computer Visiontracking 2:: Particle FiltersDocument79 pagesComputer Visiontracking 2:: Particle FiltersPriyanka DattaNo ratings yet
- Scale Invariant Feature Transform (SIFT) : CS 763 Ajit RajwadeDocument52 pagesScale Invariant Feature Transform (SIFT) : CS 763 Ajit RajwadeashuraNo ratings yet
- MD 1 PDFDocument69 pagesMD 1 PDFChandra ClarkNo ratings yet
- ML Lecture06 2Document63 pagesML Lecture06 2Marche RemiNo ratings yet
- Super-Resolution Digital Image Interpolation With Warping of Coordinate Point and Biasing of Signal AmplitudeDocument4 pagesSuper-Resolution Digital Image Interpolation With Warping of Coordinate Point and Biasing of Signal AmplitudeSaid OusguineNo ratings yet
- Wwwwrtyyu FGDHDocument25 pagesWwwwrtyyu FGDHSaad KhNo ratings yet
- Lucas-Kanade Method For Optical FlowDocument2 pagesLucas-Kanade Method For Optical Flow李金良No ratings yet
- Nonlinear SVM Classification Using KernelsDocument37 pagesNonlinear SVM Classification Using KernelsmalikdmaNo ratings yet
- Cone Beam Reconstruction: Jiang Hsieh, PH.DDocument48 pagesCone Beam Reconstruction: Jiang Hsieh, PH.Dit's somvanshiNo ratings yet
- Sampling and Pulse Code ModulationDocument14 pagesSampling and Pulse Code Modulationmysterious_samaNo ratings yet
- Nonlinear Functional Analysis and Applications: Proceedings of an Advanced Seminar Conducted by the Mathematics Research Center, the University of Wisconsin, Madison, October 12-14, 1970From EverandNonlinear Functional Analysis and Applications: Proceedings of an Advanced Seminar Conducted by the Mathematics Research Center, the University of Wisconsin, Madison, October 12-14, 1970Louis B. RallNo ratings yet
- Cellulose Nanocrystals (Synthesis, Functional Prperties, and Applications)Document11 pagesCellulose Nanocrystals (Synthesis, Functional Prperties, and Applications)SiamakNo ratings yet
- 1150-002 Flux Core Welder - 90 AmpDocument28 pages1150-002 Flux Core Welder - 90 AmpSiamakNo ratings yet
- 1150-003 MIG - Flux Core - Stick Welder - Dual Voltage, 200 AmpDocument46 pages1150-003 MIG - Flux Core - Stick Welder - Dual Voltage, 200 AmpSiamakNo ratings yet
- 1345-300 11 Amp Portable Band SawDocument18 pages1345-300 11 Amp Portable Band SawSiamakNo ratings yet
- Dewalt Cordless DrillDocument3 pagesDewalt Cordless DrillSiamakNo ratings yet
- A Review of Nanocellulose As A Novel Vehicle For Drug DeliveryDocument14 pagesA Review of Nanocellulose As A Novel Vehicle For Drug DeliverySiamakNo ratings yet
- Advances in Cellulose NanomaterialsDocument39 pagesAdvances in Cellulose NanomaterialsSiamakNo ratings yet
- Biomass CompostionsDocument21 pagesBiomass CompostionsSiamakNo ratings yet
- Updated Ipac Measures Covid 19Document15 pagesUpdated Ipac Measures Covid 19SiamakNo ratings yet
- COVID-19 in Ontario: January 15, 2020 To May 20, 2021: Daily Epidemiological SummaryDocument34 pagesCOVID-19 in Ontario: January 15, 2020 To May 20, 2021: Daily Epidemiological SummarySiamakNo ratings yet
- WHO Report - April 23Document12 pagesWHO Report - April 23CityNewsTorontoNo ratings yet
- Prevention HDocument2 pagesPrevention Hapi-521325345No ratings yet
- COVID 19 Vaccine Clinical Guidance Rheumatic Diseases SummaryDocument6 pagesCOVID 19 Vaccine Clinical Guidance Rheumatic Diseases SummarySiamakNo ratings yet
- Who Rights Roles Respon HW Covid 19Document3 pagesWho Rights Roles Respon HW Covid 19HarryNo ratings yet
- Updated Ipac Measures Covid 19Document15 pagesUpdated Ipac Measures Covid 19SiamakNo ratings yet
- Updated Ipac Measures Covid 19Document15 pagesUpdated Ipac Measures Covid 19SiamakNo ratings yet
- Operations Manual Template: A. Critical Organization InformationDocument4 pagesOperations Manual Template: A. Critical Organization InformationSiamakNo ratings yet
- COVID 19 Vaccine Clinical Guidance Rheumatic Diseases SummaryDocument6 pagesCOVID 19 Vaccine Clinical Guidance Rheumatic Diseases SummarySiamakNo ratings yet
- UV Radiation Safety Guide: Hazards Associated With Exposure To Ultraviolet LightDocument2 pagesUV Radiation Safety Guide: Hazards Associated With Exposure To Ultraviolet LightSiamakNo ratings yet
- Ultraviolet Germicidal Irradiation Handbook: July 2009Document36 pagesUltraviolet Germicidal Irradiation Handbook: July 2009SiamakNo ratings yet
- COVID-19 Vaccine Info SheetDocument8 pagesCOVID-19 Vaccine Info SheetShabin ShabiNo ratings yet
- Particle Image VelocimetryDocument16 pagesParticle Image VelocimetrySiamakNo ratings yet
- Uviguide PDFDocument8 pagesUviguide PDFAzhar Hussain ShahNo ratings yet
- ShahnamehDocument2,316 pagesShahnamehfrojyaNo ratings yet
- Uviguide PDFDocument8 pagesUviguide PDFAzhar Hussain ShahNo ratings yet
- 40 Breathtaking Places T..Document61 pages40 Breathtaking Places T..SiamakNo ratings yet
- Lecture03 PivDocument20 pagesLecture03 PivSiamakNo ratings yet
- Shahnameh by FerdowsiDocument2,316 pagesShahnameh by FerdowsiSiamakNo ratings yet
- Pyramid and PrismDocument2 pagesPyramid and PrismOktavianaalfNo ratings yet
- Unit-1 Sensors Part-1Document30 pagesUnit-1 Sensors Part-117 CSE Lokesh VNo ratings yet
- Questions Physics XIIDocument137 pagesQuestions Physics XIIChandra Prashad SharmaNo ratings yet
- CGCAT Exam For TECHNICAL Officers (Mechanical) - Model QPDocument9 pagesCGCAT Exam For TECHNICAL Officers (Mechanical) - Model QPBiswanath SamantarayNo ratings yet
- SMD Type Mosfet: P-Channel AO3407ADocument4 pagesSMD Type Mosfet: P-Channel AO3407AledNo ratings yet
- Fluid Flow Continuity Equation (Part 3)Document3 pagesFluid Flow Continuity Equation (Part 3)asapamoreNo ratings yet
- Radiation UnitsDocument20 pagesRadiation UnitsMartenNo ratings yet
- AC Circuits Knowledge Bank ExplainedDocument34 pagesAC Circuits Knowledge Bank ExplainedMalak SamirNo ratings yet
- Is.3151.1982 Earthing TransformersDocument14 pagesIs.3151.1982 Earthing TransformersbonjurdikarNo ratings yet
- Review of Vector Algebra (Ch-7) Multivariate CalculusDocument14 pagesReview of Vector Algebra (Ch-7) Multivariate CalculusSubrat BarikNo ratings yet
- PYQ Phase Controlled RectifiersDocument32 pagesPYQ Phase Controlled Rectifiers14 Asif AkhtarNo ratings yet
- 3) Berthing Energy: Ref. No.: MF17-007-01K-FSPR2Document2 pages3) Berthing Energy: Ref. No.: MF17-007-01K-FSPR2kartikeya RanjanNo ratings yet
- Physics 0625 Mr.M.allam NotesDocument199 pagesPhysics 0625 Mr.M.allam Notesmohammed mahdy100% (1)
- Suction Cup - SMC - Design Guide-32-125 Dia FormulasDocument6 pagesSuction Cup - SMC - Design Guide-32-125 Dia FormulaslakkappaNo ratings yet
- Atwood AirCommand Air Conditioner Service ManualDocument27 pagesAtwood AirCommand Air Conditioner Service ManualYordis Daniel Rojas ChirinosNo ratings yet
- Endress-Hauser LPGmass 8FE enDocument4 pagesEndress-Hauser LPGmass 8FE enEjaz Ahmed RanaNo ratings yet
- SDC8 Paper36Document8 pagesSDC8 Paper36hdrthNo ratings yet
- Calibrador de Energia Fluke 6100ADocument16 pagesCalibrador de Energia Fluke 6100AMat MaxNo ratings yet
- Tan Delta Testing On Rotating MachinesDocument52 pagesTan Delta Testing On Rotating Machinescubartur100% (1)
- Ch.2-Sensors and Transducer EET 238 InstrumentationDocument73 pagesCh.2-Sensors and Transducer EET 238 InstrumentationAbeyu AssefaNo ratings yet
- Weekly Home Learning Plan For Grade 12 STEM in Gen Physics 1, Quarter 2, Online Distance LearningDocument4 pagesWeekly Home Learning Plan For Grade 12 STEM in Gen Physics 1, Quarter 2, Online Distance LearningM. Darius LagascaNo ratings yet
- 1 IGSCE ResistanceDocument7 pages1 IGSCE ResistanceNeneng JubaedahNo ratings yet
- Grade 12 FT Sample Paper 2 QPDocument13 pagesGrade 12 FT Sample Paper 2 QPsafaaNo ratings yet
- Answer Key Chapter 1Document3 pagesAnswer Key Chapter 1linNo ratings yet
- PESCODocument7 pagesPESCOSibghatullah SiyalNo ratings yet
- Electronics Quiz #2: I Read This Text Carefully: II Now, Answer These QuestionsDocument2 pagesElectronics Quiz #2: I Read This Text Carefully: II Now, Answer These Questionsoliver basultoNo ratings yet
- DGE502/EGE502 NGEC 2 Readings in Philippine HistoryTITLE Quantity, Definition, and Vector/Scalar Table TITLE Solving Projectile Motion Problems Step-by-StepDocument7 pagesDGE502/EGE502 NGEC 2 Readings in Philippine HistoryTITLE Quantity, Definition, and Vector/Scalar Table TITLE Solving Projectile Motion Problems Step-by-Stepaki sintaNo ratings yet
- P K Nag Exercise Problems Solved ThermodDocument265 pagesP K Nag Exercise Problems Solved ThermodSiddhant DeyNo ratings yet
- National University Physics Midterm ExamDocument4 pagesNational University Physics Midterm ExamBá Phong LêNo ratings yet
- Moving Iron Instruments - Voltmeter and Ammeter - EEPDocument4 pagesMoving Iron Instruments - Voltmeter and Ammeter - EEPProcurement PardisanNo ratings yet